 智能車方向控制舵機PWM技術
智能車方向控制舵機PWM技術
舵機
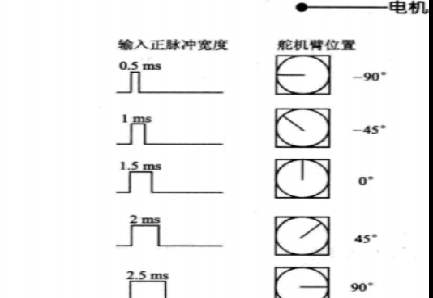
舵機是一種位置(角度)伺服的驅動器,我們可以通過給信號腳不同的占空比來讓舵機進行打角進而控制小車方向。
例如C車的S3010舵機,它需要使用周期20ms(50Hz)的PWM驅動,高電平時間和舵機打角的對應關系如下:
PWM技術
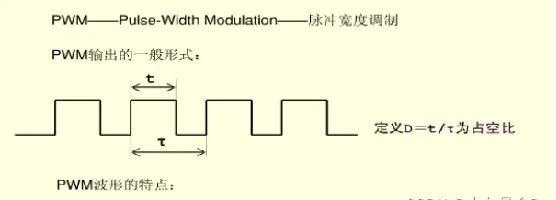
這里補充一下PWM技術,我們常說的PWM可以理解為一組方波,其周期就是兩個相鄰的上升沿或者兩個相鄰下降沿的時間,上述舵機使用的就是一個周期為20毫秒的PWM驅動;而占空比就是在一個周期內高電平的時間。
PWM技術簡稱脈寬調制,是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術,廣泛應用在測量、通信、工控等方面。
PWM的頻率:
是指在1秒鐘內,信號從高電平到低電平再回到高電平的次數,也就是說一秒鐘PWM有多少個周期,單位Hz。
PWM的周期:
T=1/f,T是周期,f是頻率。
如果頻率為50Hz ,也就是說一個周期是20ms,那么一秒鐘就有 50次PWM周期。
占空比:
是一個脈沖周期內,高電平的時間與整個周期時間的比例,單位是% (0%-100%)
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
PWM
+關注
關注
114文章
5148瀏覽量
213427 -
智能車
+關注
關注
21文章
402瀏覽量
76914 -
舵機
+關注
關注
17文章
265瀏覽量
40958
發布評論請先 登錄
相關推薦
飛思卡爾智能車制作全過程
飛思卡爾智能車制作全過程 本人在很久以前做的一輛用來比賽的智能車--獲得華北一等獎,全國二等獎,有許多可改進地方,下面我們來立即開始我們的智能車制作之旅。 首先,一個系統中,傳感器至關重要:不管
發表于 05-18 14:14
智能車系統解決方案總體設計
大神提出改善的建議。資料在闖客網技術論壇下載 整個系統分為懸停半空的攝像頭識別系統和地面的智能車控制系統,這兩個系統均采用MKL26Z256VLL4作為核心控制單元。半空中的識別系統通
發表于 10-24 19:17
基于紅外傳感技術的STM32智能車
設計一種集紅外遙控、 黑線循跡、自動泊車、車速檢測、行駛路程顯示等功能于一體的智能車。主要使用了紅外傳感技術,并結合 STM32F103 系列芯片,模擬現代新型汽車的自動駕駛功能。 采用槽型對射光電
發表于 02-28 20:07
電磁循跡智能車是由哪些模塊組成的
我的第一輛智能車—電磁循跡智能車以下是所用的模塊:舵機,電機,L298N驅動模塊,PID算法,OLED,電磁桿,ADC多路采集配置DMA,干簧管,普通GPIO口使用。1.舵機模塊
發表于 01-14 09:08
雙舵機模糊控制在智能車控制中的應用介紹
,如何讓智能車在不同形狀的賽道上進行平穩 、快速的切換,實現路徑的最優控制,是轉向控制的一個關鍵問題 目前,轉向控制的物理實現普遍采用的是用一個舵機
發表于 09-19 08:03
飛思卡爾智能車舵機和測速的控制設計與實現
“飛思卡爾”杯全國大學生智能汽車競賽要求車模行駛“穩”、“準”、“快”。通過優化智能車系統中舵機安裝,利用霍爾傳感器控制測速,車模在不同賽道都能夠適應新賽道,
發表于 02-11 12:13
?237次下載






 工商網監
工商網監
評論