 PID參數采樣周期選擇
PID參數采樣周期選擇
在學習 PID 算法的參數整定的時候,每一個系統的 PID系數是不通用的,在不同的系統中運用同樣的 PID系數,其最終所體現的效果可能是相差可能甚遠的,所以我們需要根據實際的系統進行 PID 的參數整定(調參)。
采樣周期選擇
采樣周期指的是 PID控制中實際值的采樣時間間隔,其越短,效果越趨于連續,但對硬件資源的占用也越高。在實際的應用中,我們可以使用理論或者經驗方法來確定采樣周期:
① 理論方法:香農采樣定理。
這個定理可以用來確定采樣周期可選擇的最大值,當采樣周期超出了這個最大的允許范圍,我們所得到的信號就會失真,也就無法較好地還原信號了。
香農采樣定理的具體原理我們不展開介紹,感興趣的朋友可以去查找相關的資料,我們這里重點關注經驗方法。
② 經驗方法:根據控制對象突變能力選擇。
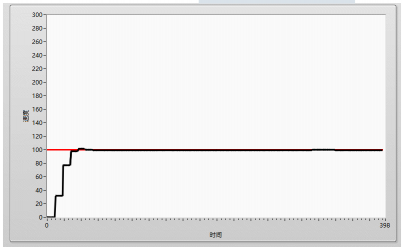
假設電機當前轉速為 20RPM,我們需要提高它的轉速到 30RPM,此電機的轉速在 1s 之內最大可以突變 10RPM,如果我們每 1ms采集一次電機轉速,那么每一次采集到的速度變化量最大為 10RPM / 1000 =0.01RPM。
很明顯,此時最大的變化量遠遠小于當前的速度,對我們的 PID控制效果并沒有明顯的提升,但是卻占用了很多的硬件資源,因此,我們需要根據控制對象的突變能力來選擇采樣周期。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
PID
+關注
關注
35文章
1471瀏覽量
85286 -
電機轉速
+關注
關注
0文章
62瀏覽量
11331 -
系統
+關注
關注
1文章
1006瀏覽量
21314
發布評論請先 登錄
相關推薦
STM32 ADC的采樣周期確定
ADC 使用若干個ADC_CLK 周期對輸入電壓采樣,采樣周期數目可以通過ADC_SMPR1 和ADC_SMPR2 寄存器中的SMP[2:0]位而更改。
發表于 03-22 10:45
?6020次閱讀
看完這個故事你就明白了PID控制原理
現在一般采用的是臨界比例法。利用該方法進行 PID控制器參數的整定步驟如下:(1)首先預選擇一個足夠短的采樣周期讓系統工作;(2)僅加入比例
用單片機做PID控制時采樣時間的選擇
在用單片機做PID控制時,要事先選擇采樣時間T,但采樣時間不是要根據上升時間或振蕩時間來選取嗎?我如何事先知道一個系統的上升時間或振蕩時間,或是有別的
發表于 05-07 16:33
控制電機PID的結構和參數算法選擇
控制電機PID的結構和參數算法選擇在電機控制中,無論是DTC控制方法還是FOC控制方法,最后都要基于PID控制器來實現。想與大家具體的討論下對PID
發表于 01-29 16:50
stm32 AD采樣周期如何計算?
使用ADC_ExternalTrigInjectedConvConfig(ADC1, ADC_ExternalTrigInjecConv_T8_CC4)選擇上升沿觸發,是不是AD采樣周期=PWM
發表于 02-25 15:43
干貨|最經典的PID參數整定教程
比例度法一個調節系統,在階躍干擾作用下,出現既不發散也不衰減的等幅震蕩過程,此過程成為等幅振蕩過程,如下圖所示。此時pid調節器的比例度為臨界比例度δk,被調參數的工作周期為為臨界周期
發表于 12-26 21:40
伺服的采樣周期、循環時間、響應時間、響應頻率和帶寬相關資料分享
伺服的采樣周期:(對速度環、位置環而言,是對編碼器采樣,對電流環而言,是對霍爾元件或者電流互感器采樣)、循環時間和響應時間均為伺服運動控制能力的指標。伺服循環時間:指
發表于 06-28 10:08
采樣周期T對系統特性的影響
調速系統的特點。2. 研究采樣周期T對系統特性的影響。3. 研究電機調速系統PID控制器的參數的鑒定方法。二.實驗儀器1. EL-AT-III型計算機控制系統實驗箱一臺。2. PC計算
發表于 09-07 06:59
PID采樣時間精準控制的相關資料分享
我們在用到PID算法時,有時候會使用積分分離的抗飽和算法,或是另一類屬于增量式的PID算法。這時,需要提供一個PID采樣間隔來控制采樣率,大
發表于 12-08 07:54
關于微機控制系統采樣周期的分析
本文全面地分析了采樣周期對微機控制系統的穩定性、動態品質、抗干擾能力、數字PID 的控制作用的影響,并提出了采樣周期可能影響最小相位系統變成
發表于 09-16 10:45
?8次下載
STM32_ADC采樣時間_采樣周期_采樣頻率計算方法分析
ADC轉換就是輸入模擬的信號量,單片機轉換成數字量。讀取數字量必須等轉換完成后,完成一個通道的讀取叫做采樣周期。采樣周期一般來說=轉換時間+讀取時間。轉換時間=
發表于 11-14 14:52
?3.4w次閱讀

PID控制中如何整定PID參數
作為經典的控制理論,PID控制規律仍然是當今工控行業的主導控制方式,無論復雜、簡單的控制任務,PID控制都能取得滿意的控制效果,前提是PID參數必須
發表于 06-01 10:28
?65次下載






 工商網監
工商網監
評論