") 突破物理束縛,協(xié)作機器人助力實現(xiàn)真正的柔性生產(chǎn)
突破物理束縛,協(xié)作機器人助力實現(xiàn)真正的柔性生產(chǎn)
機器人在工業(yè)生產(chǎn)制造中有著重要的應(yīng)用。通過機器人對人工的替代,不僅可以提高生產(chǎn)效率和產(chǎn)品質(zhì)量,同時也能降低生產(chǎn)成本并避免人工在高危作業(yè)環(huán)境下受到傷害。當(dāng)然,隨著產(chǎn)品推陳出新的速度加快,加上客制化需求明顯增加,工業(yè)機器人的主要任務(wù)也在發(fā)生著悄然的變化:傳統(tǒng)完成搬運、焊接和噴涂的單一功能機器人適應(yīng)能力越來越差,而協(xié)作機器人則成為行業(yè)新寵。
協(xié)作機器人的出現(xiàn),創(chuàng)造出了一種全新的工業(yè)自動化模式,它比傳統(tǒng)機器人更便宜、更易于部署,并且有著更高的安全性。
根據(jù)Interact Analysis的預(yù)測數(shù)據(jù),由于協(xié)作機器人早期使用者已經(jīng)證明這一模式的正確性,并且得到了很好的效益回報,因此未來幾年協(xié)作機器人的部署將會變得非常普遍,在全球機器人市場的滲透率將從現(xiàn)在的5%快速提升到2027年的30%。
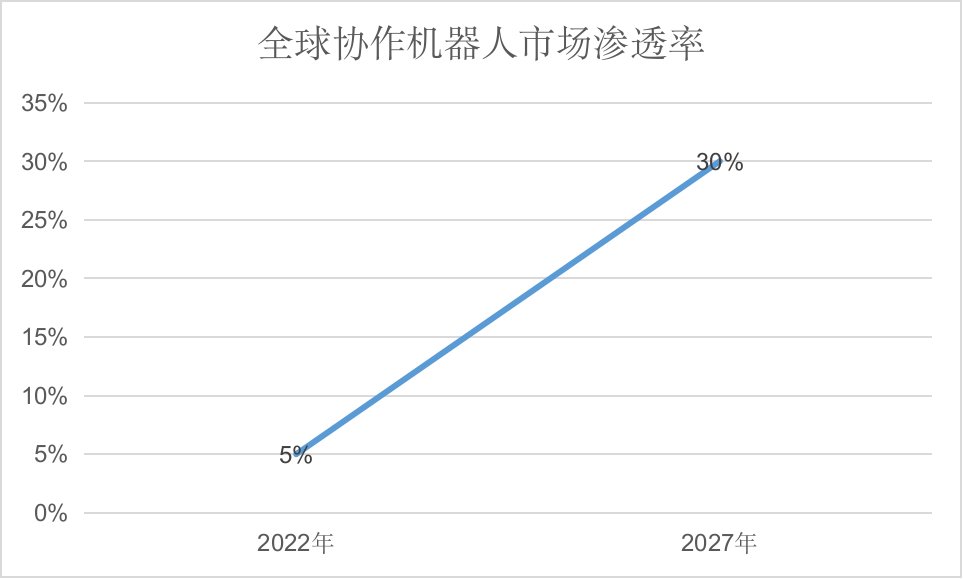
圖1:全球協(xié)作機器人滲透率提升
(圖源:貿(mào)澤電子)
協(xié)作機器人在設(shè)計過程中比傳統(tǒng)機器人需要更多的考慮,后者基本只關(guān)注高速、高效和精準性,而協(xié)作機器人在此基礎(chǔ)上增加了安全性、協(xié)作性、易用性和經(jīng)濟性的考量,使其能夠以更低的硬件成本和部署成本,和現(xiàn)場人工進行配合工作,這是實現(xiàn)高效柔性生產(chǎn)的關(guān)鍵。
當(dāng)然,打造這樣的協(xié)作機器人就需要更先進的元器件支持,本文我們將會選取幾款貿(mào)澤電子在售的元器件產(chǎn)品,看看它們在協(xié)作機器人設(shè)計過程中發(fā)揮著怎樣的作用。
協(xié)作機器人真正的推動因素
柔性生產(chǎn)
協(xié)作機器人作為一個新興的機器人品類,如上所述,設(shè)計之初的目的是降低傷害風(fēng)險,讓機器人和人類能夠更安全、簡單地交互,具備輕量化、靈活性高、安全可靠、簡單易上手和易于編程等顯著優(yōu)點。
不過,在協(xié)作機器人面世的初期階段,市場反饋并不熱烈,原因在于當(dāng)時的生產(chǎn)任務(wù)主要以品類單一、批量大和功能相對簡單為主,傳統(tǒng)機器人具有裝備專用、技藝平穩(wěn)的特點,有著不錯的生產(chǎn)效率,因此制造商沒有太大的動力去更改產(chǎn)線。
隨著科學(xué)技術(shù)的迅速發(fā)展,人們對商品的功能、體驗、品質(zhì)有了更高的要求,就連汽車都開始推出消費者個性化定制的服務(wù)。這時再看傳統(tǒng)機器人,其工作任務(wù)調(diào)校需要現(xiàn)場工程師、編程人員和產(chǎn)品經(jīng)理花費數(shù)周,甚至是數(shù)月的時間,等到這些都做完后,商機早已錯過。
因此,真正讓協(xié)作機器人需求量大漲的原因是柔性生產(chǎn)逐漸成為主流。作為一種富有彈性和高度靈活的生產(chǎn)方式,柔性生產(chǎn)以市場需求為導(dǎo)向,按需生產(chǎn)、彈性供應(yīng),從而滿足消費者的個性化和定制化需求。
柔性生產(chǎn)的“柔性”二字具有多個維度,包括設(shè)備柔性、工藝柔性、產(chǎn)品柔性、擴展柔性、運行柔性和維護柔性等。其中,設(shè)備柔性是重要的樞紐,因此協(xié)作機器人能夠在其中發(fā)揮巨大的價值。
協(xié)作機器人分為軟硬件兩部分,不過在易于使用的背后,協(xié)作機器人的軟硬件其實都更加復(fù)雜。協(xié)作機器人的硬件分為機體和控制系統(tǒng)兩部分:機體主要包括底座、下框架、上框架、手臂、手腕體、手腕附件等;控制系統(tǒng)是協(xié)作機器人的大腦和神經(jīng),包括控制芯片、伺服電機、減速器、傳感器等,這些器件配合在一起便能夠根據(jù)程序執(zhí)行非常復(fù)雜的操作,而且非常安全。
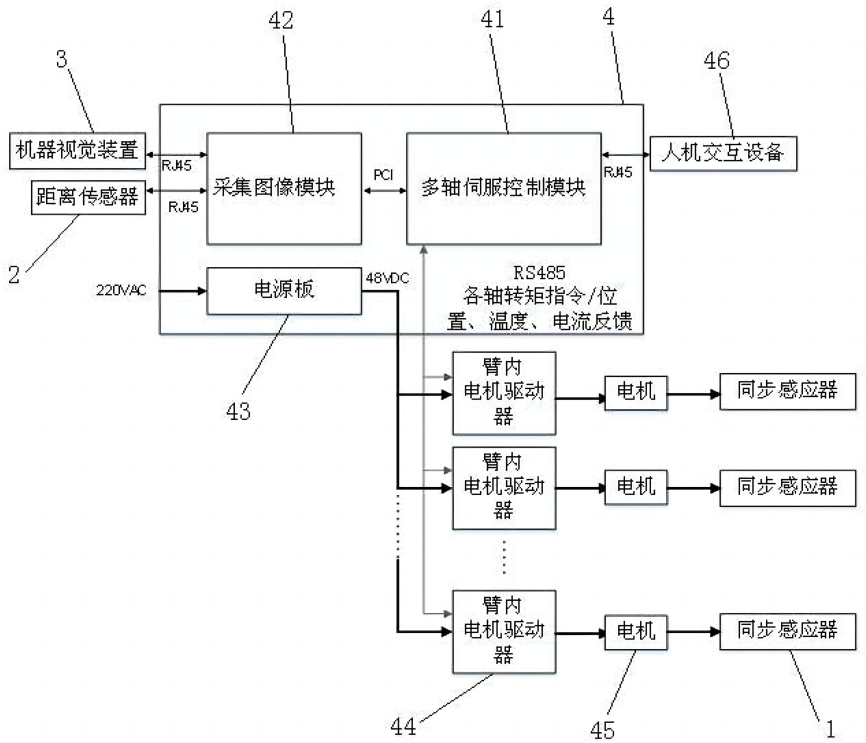
圖2:一種協(xié)作機器人的控制系統(tǒng)
(圖源:國家專利網(wǎng);發(fā)明人:王龍祥、肖海峰)
協(xié)作機器人軟件系統(tǒng)的優(yōu)勢是可以非常容易地進行修改,即使沒有編程經(jīng)驗的操作員也可以快速設(shè)置和操作。為了操作簡單,用戶界面一般可以直接呈現(xiàn)在平板電腦或者其它手持設(shè)備上。現(xiàn)階段,協(xié)作機器人已經(jīng)能夠和CorePro、PHM、AMMS等知名的工業(yè)智能系統(tǒng)進行融合,以做到系統(tǒng)性調(diào)度和人機協(xié)作。
綜合而言,協(xié)作機器人為柔性生產(chǎn)帶來了四大智能化能力,分別是智能感知、智能控制、智能診斷和智能決策。有了這些能力,協(xié)作機器人在整個生產(chǎn)場景中實際上就可以脫離物理束縛,和人類友好地共處。
有了協(xié)作機器人,我們看到傳統(tǒng)需要大量人工完成的工作都可以讓機器人去做。比如柔性物流,協(xié)作機器人可以自主完成卸貨、轉(zhuǎn)運、碼垛、上料等工作。再比如柔性焊接,過往焊接主要靠人工焊接和“龍門焊接”方式,人工焊接限制大、不可靠,“龍門焊接”可靠但不靈活;協(xié)作機器人則可以根據(jù)不同金屬材料、不同焊接材料、不同焊接位置靈活調(diào)整。
總結(jié)而言,協(xié)作機器人和柔性生產(chǎn)是共同促進的,在人力成本不斷上升的情況下,其價值會愈發(fā)凸顯。下面,我們就來看一下哪些元器件在打造協(xié)作機器人時能夠發(fā)揮大價值。
讓協(xié)作機器人實現(xiàn)
更好運動效果的慣性模塊
如果要用兩個形容詞來描述協(xié)作機器人,那么功能強大和小巧靈活肯定是很多人認可的詞匯。要想打造這樣的協(xié)作機器人,能夠提供感知能力的傳感器就顯得非常重要。
比如,上述提到的協(xié)作機器人的硬件,其中機體上的手臂和手腕體里就容納了大量的傳感器,這些傳感器有的用于力量控制,有的用于狀態(tài)檢測,還有的用于運動控制等等。
實際上,一款協(xié)作機器人水平的高低和傳感器有非常大的關(guān)系,其高精度、靈活性、安全性和高效率都和傳感器息息相關(guān)。
我們知道現(xiàn)在六軸協(xié)作機器人非常火,它通過模仿人類的手臂運動方式,可以在各種環(huán)境下進行高度靈活的操作,是目前主流的協(xié)作機器人。
下面這款慣性模塊便非常適用于打造六軸協(xié)作機器人,來自制造商STMicroelectronics,貿(mào)澤電子官網(wǎng)上該器件的料號為ISM330ISNTR。
ISM330IS和ISN330ISN
iNEMO慣性模塊
 ?
?
?
?圖3:ISM330ISNTR
(圖源:貿(mào)澤電子)
STMicroelectronics的ISM330IS和ISN330ISN iNEMO慣性模塊是系統(tǒng)級封裝器件,包含一個三軸數(shù)字加速度計和一個三軸數(shù)字陀螺儀。并且,該套件提供一個傳感器中樞,可以進一步嵌入四個外部傳感器。
通過嵌入式ISPU(智能傳感器處理單元),該器件能夠以非常低的功耗在邊緣端進行傳感器信號處理和執(zhí)行AI算法。ISPU是一個高性能的可編程核心,通過C語言進行編程,并具有增強型生態(tài)系統(tǒng)(帶各種庫和第三方工具/IDE)。
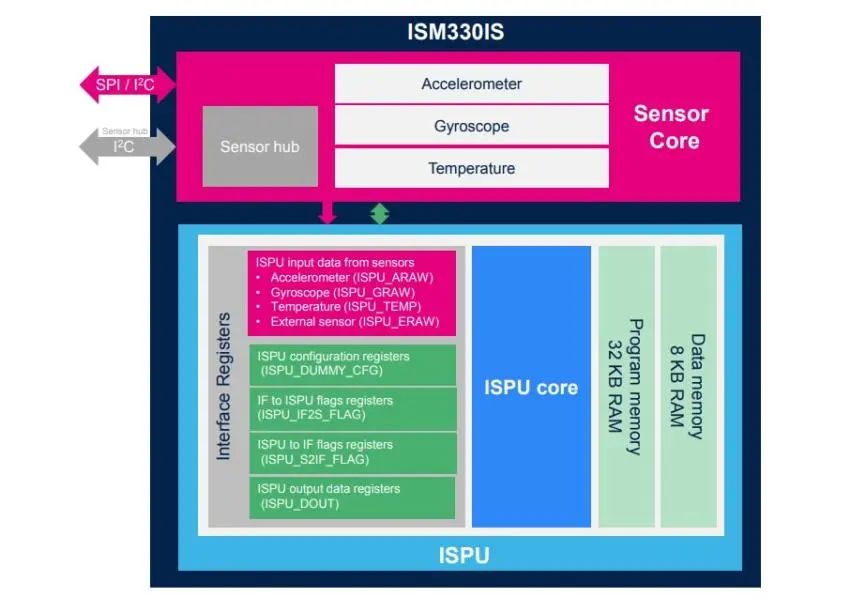
圖4:ISM330IS和ISN330ISN iNEMO
慣性模塊內(nèi)部框圖
(圖源:STMicroelectronics)
除了可編程和可擴展特性,ISM330IS和ISN330ISN iNEMO慣性模塊具有的另一個特色性能是提供可選量程,這些模塊的滿量程加速度范圍為±2/±4/±8/±16g,角速率范圍為±125/±250/±500/±1000/±2000dps;此外,這些模塊具有出色的低功耗特性,高性能模式下的電流消耗為0.59mA,并且具有常開的低功耗特性,低功耗模式下的電流消耗為0.46mA(僅陀螺儀+加速度計,不包括ISPU)。
基于這些出色的特性,ISM330IS和ISN330ISN iNEMO慣性模塊能夠助力實現(xiàn)具有出色運行性能的工業(yè)協(xié)作機器人。
了解協(xié)作機器人
狀態(tài)信息的運動傳感器
協(xié)作機器人能夠獨立完成工作任務(wù),也能夠和人工合作完成大量復(fù)雜的工作任務(wù),當(dāng)然前提是協(xié)作機器人處于一個良好的工作狀態(tài)下。為了讓協(xié)作機器人盡量不出現(xiàn)宕機狀態(tài),實時監(jiān)測協(xié)作機器人的狀態(tài)信息是很有必要的。
出于全面了解協(xié)作機器人工作狀態(tài)的目的,研發(fā)人員采取了很多手段,比如通過PLC或組態(tài)軟件對運行狀態(tài)進行監(jiān)測;通過傳感器獲取協(xié)作機器人各個關(guān)鍵組件和整體的狀態(tài)量;還有通過三維仿真進行模擬來進行狀態(tài)監(jiān)測等。
下面我們推薦一款能夠進行傳感器信息監(jiān)測的MEMS數(shù)字輸出運動傳感器,同樣是來自制造商STMicroelectronics,貿(mào)澤電子官網(wǎng)上該器件的料號為IIS2DLPCTR。
IIS2DLPCMEMS
數(shù)字輸出運動傳感器
 ?
?
?
?圖5:IIS2DLPC MEMS數(shù)字輸出運動傳感器
(圖源:貿(mào)澤電子)
IIS2DLPC MEMS數(shù)字輸出運動傳感器是一款超低功耗、高性能、三軸線性加速度計。在超低功耗方面,掉電模式下器件功耗僅為50nA,有源低功耗模式下器件功耗低于1μA,高性能模式下器件功耗為120μA;在高性能方面,IIS2DLPC具有用戶可選的±2g/±4g/±8g/±16g滿量程,能夠測量1.6Hz至1600Hz輸出數(shù)據(jù)速率的加速度,并提供高達800Hz的帶寬;IIS2DLPC具有專用的內(nèi)部引擎,用于處理運動和加速度檢測,包括自由落體、喚醒、高度可配置的單/雙擊識別、活動/不活動、靜止/運動檢測、縱向/橫向檢測和6D/4D定向。
IIS2DLPC設(shè)有數(shù)字I2C/SPI輸出接口,僅有低至90μg/√Hz的超低噪聲。另外,IIS2DLPC提供32級FIFO和2個獨立的可編程中斷,允許用戶存儲數(shù)據(jù)以減少主處理器的干預(yù)。用戶還可通過嵌入式自檢功能檢查傳感器在終端應(yīng)用中的運行情況。
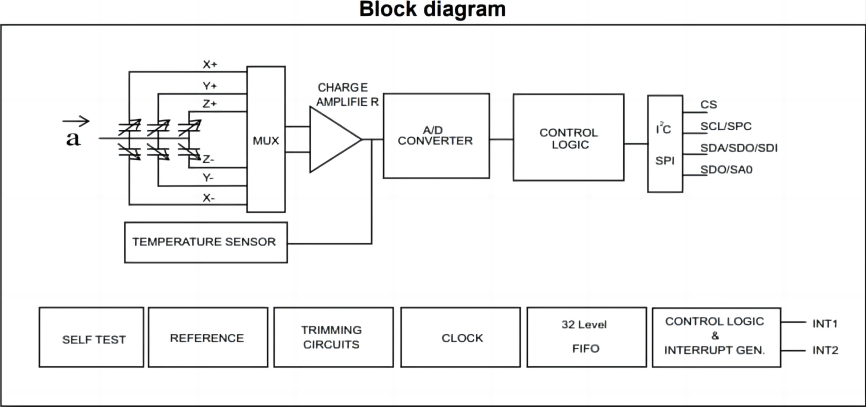
圖6:IIS2DLPC系統(tǒng)框圖
(圖源:STMicroelectronics)
IIS2DLPC MEMS數(shù)字輸出運動傳感器可用于協(xié)作機器人的振動監(jiān)測、俯仰和傾斜度測量以及沖擊識別和記錄。
柔性生產(chǎn)需要更自主
更靈活的協(xié)作機器人
未來,柔性生產(chǎn)將更加注重智能化和數(shù)字化,進一步改善生產(chǎn)過程中的協(xié)調(diào)和效率問題,進一步提升定制化產(chǎn)品的生產(chǎn)能力。
在這個大背景下,作為柔性生產(chǎn)的主要生產(chǎn)力之一,協(xié)作機器人要做到更自主、更靈活。更自主也就意味著更智能,協(xié)作機器人對于人工智能、機器學(xué)習(xí)和感知技術(shù)的應(yīng)用將更加的純熟;更靈活意味著更強的適應(yīng)性,能夠快速適應(yīng)不同的任務(wù)和工作環(huán)境,并具備自適應(yīng)能力。
這些改變都離不開先進的電子元器件,貿(mào)澤電子將和廣大工程師攜手并進,打造性能更優(yōu)秀的協(xié)作機器人,賦能柔性生產(chǎn)更好地發(fā)展。
相關(guān)技術(shù)資源
STMicroelectronics的ISM330IS和ISN330ISN iNEMO慣性模塊,了解詳情>>
STMicroelectronics的IIS2DLPC MEMS數(shù)字輸出運動傳感器,了解詳情>>
該發(fā)布文章為獨家原創(chuàng)文章,轉(zhuǎn)載請注明來源。對于未經(jīng)許可的復(fù)制和不符合要求的轉(zhuǎn)載我們將保留依法追究法律責(zé)任的權(quán)利。
關(guān)于貿(mào)澤電子貿(mào)澤電子(Mouser Electronics)是一家全球知名的半導(dǎo)體和電子元器件授權(quán)代理商,分銷超過1200家品牌制造商的680多萬種產(chǎn)品,為客戶提供一站式采購平臺。我們專注于快速引入新產(chǎn)品和新技術(shù),為設(shè)計工程師和采購人員提供潮流選擇。歡迎關(guān)注我們!
更多精彩

原文標題:突破物理束縛,協(xié)作機器人助力實現(xiàn)真正的柔性生產(chǎn)
文章出處:【微信公眾號:貿(mào)澤電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
貿(mào)澤電子
+關(guān)注
關(guān)注
16文章
1100瀏覽量
96558
原文標題:突破物理束縛,協(xié)作機器人助力實現(xiàn)真正的柔性生產(chǎn)
文章出處:【微信號:貿(mào)澤電子,微信公眾號:貿(mào)澤電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
優(yōu)傲機器人升級高負載協(xié)作機器人,助力客戶生產(chǎn)效率飛躍
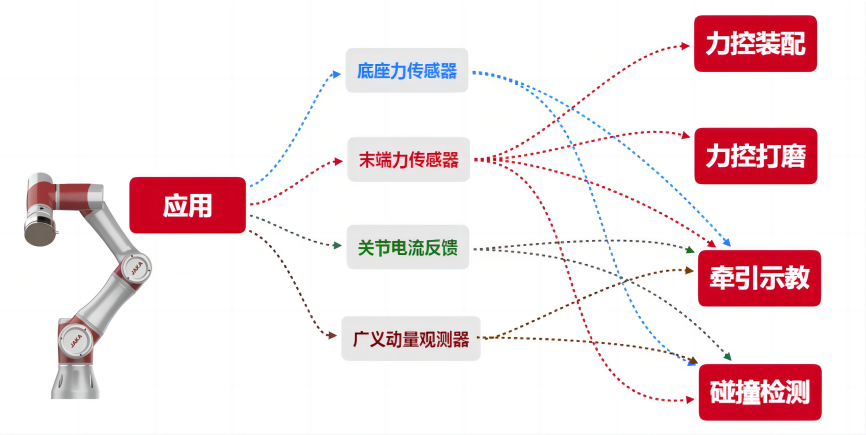
協(xié)作機器人拽拖示教詳解


柔性機器人與剛性機器人區(qū)別與聯(lián)系

復(fù)合機器人:重塑柔性生產(chǎn)的未來
工業(yè)4.0中的機器人向協(xié)作機器人演進
富唯智能機器人控制系統(tǒng):實現(xiàn)規(guī)模化柔性生產(chǎn)的智能引擎

3D打印“皮膚”助力機器人實現(xiàn)安全高效協(xié)同工作

PCB行業(yè):用協(xié)作機器人,就選大族機器人
協(xié)作機器人和工業(yè)機器人區(qū)別在哪?
富唯智能機器人集成了協(xié)作機器人、移動機器人和視覺引導(dǎo)技術(shù)
科聰協(xié)作科聰協(xié)作(復(fù)合)移動機器人整體解決方案

一文讀懂:為什么碰撞檢測是協(xié)作機器人的底層技術(shù)
交互的藝術(shù):協(xié)作機器人如何定義新一代的人機關(guān)系?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論