 如何在MATLAB查找消息類型
如何在MATLAB查找消息類型
消息是ROS中交換數據的主要容器。主題和服務使用消息在節點之間傳輸數據。為了標識其數據結構,每條消息都有一個消息類型。
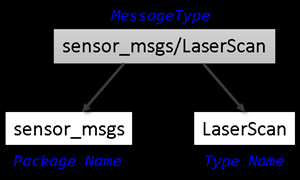
例如,來自激光掃描儀的傳感器數據通常以sensor_msgs/LaserScan類型的消息發送。
每種消息類型標識消息中包含的數據元素。每個消息類型名稱都是一個包名稱。
MATLAB支持在機器人應用程序中經常遇到的許多ROS消息類型。這個例子展示了在MATLAB中創建、探索和填充ROS消息的一些方法。
1. 查找消息類型
初始化ROS主節點和全局節點
rosinit
Launching ROS Core…
Done in 0.37599 seconds.
Initializing ROS master on
http://172.29.217.11:53161.
Initializing globalnode /matlab_global_node_29455 with NodeURI
http://dcc083455glnxa64:37683/
and MasterURI http://localhost:53161.
使用exampleHelperROSCreateSampleNetwork使用另外三個節點以及示例發布者和訂閱者填充ROS網絡。
網絡上有各種節點,它們都有一些主題和關聯的發布者和訂閱者。
您可以通過調用rostopic list查看可用主題的完整列表。
rostopic list
/pose
/rosout
/scan
/tf
如果您想了解更多關于通過/scan主題發送的數據類型的信息,請使用rostopic info命令來檢查它。
/scan的消息類型為sensor_msgs/LaserScan
rostopic info /scan
Type: sensor_msgs/LaserScan
Publishers:
/node_3 (http://dcc083455glnxa64:36623/)
Subscribers:
/node_1 (http://dcc083455glnxa64:42445/)
/node_2 (http://dcc083455glnxa64:39859/)
命令輸出還告訴您哪些節點正在發布和訂閱主題。要了解有關發布者和訂閱者的信息,請參見調用和提供ROS服務。
若要了解有關主題消息類型,rosmessage支持消息類型的TAB補全。若要完成消息類型名稱,請鍵入要完成的名稱的前幾個字符,然后按Tab鍵。
scandata = rosmessage("sensor_msgs/LaserScan","DataFormat","struct")
scandata = struct with fields:
MessageType: ‘sensor_msgs/LaserScan’
Header: [1x1 struct]
AngleMin: 0
AngleMax: 0
AngleIncrement: 0
TimeIncrement: 0
ScanTime: 0
RangeMin: 0
RangeMax: 0
Ranges: [0x1 single]
Intensities: [0x1 single]
要查看主題和服務可用的所有消息類型的完整列表,請使用rosmsg list
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
matlab
+關注
關注
182文章
2963瀏覽量
230170 -
機器人
+關注
關注
210文章
28205瀏覽量
206535 -
數據結構
+關注
關注
3文章
573瀏覽量
40093
發布評論請先 登錄
相關推薦
如何在MATLAB中獲得幫助
本帖最后由 A670521546 于 2011-5-8 23:04 編輯
如何在MATLAB中獲得幫助如果你想知道一個函數的用法,并且知道它的函數名,可以用“help”命令:>
發表于 09-22 15:31
如何在Matlab中讀取bin文件?
Hi Waveforms可以通過DSO9254A保存為bin文件。如何在Matlab中讀取這樣的bin文件?我認為應該有Matlab API用于此目的,但我沒有找到它們。 Senmeis 以上
發表于 02-13 16:10
如何在matlab中實現Virtual Reality 技術
如何在matlab中實現Virtual Reality 技術,資料的代碼很全,步驟很清晰,很實用,歡迎大家下載交流。
發表于 06-03 16:57
?0次下載
如何在MATLAB中開發基于像素的視頻和圖像處理算法
此講座將結合新產品的特性,重點介紹如何在MATLAB?中開發基于像素流的視頻和圖像處理的算法,并通過HDL代碼產生的技術快速在FPGA上實現。你將了解到:如何在MATLAB中開發基于像
如何在MATLAB中使用藍牙進行無線通信
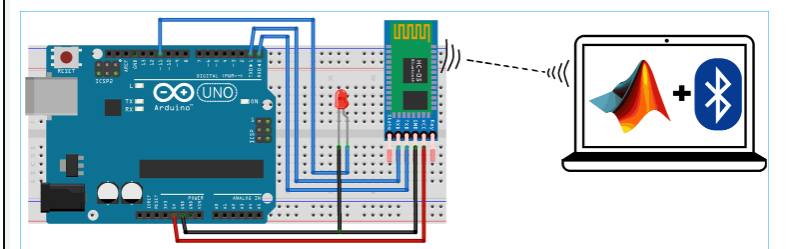
在本教程中,我們將學習如何在 MATLAB 中使用藍牙進行無線通信。我們將使用計算機的內置藍牙,一側帶有 MATLAB,另一側帶有 Arduino 的 HC-05。
發表于 09-23 16:55
?8058次閱讀

如何在Linux中查找斷開的符號鏈接
的快捷方式。符號鏈接在 Linux 中大量用于鏈接庫。 當鏈接指向的原始文件被刪除時,該鏈接變為死鏈接。保留此類鏈接可能不是一個好主意。 現在問題來了,如何在 Linux 中找到斷開的符號鏈接?一些發行版以
【原創分享】如何在PADS Logic中查找器件
PADS Logic提供類似于Windows的查找功能,可以進行器件的查找。 (1)在Logic設計界面中,將菜單顯示中的“選擇工具欄”進行打開,如圖1所示,會彈出對應的“選擇工具欄”的分欄菜單





 工商網監
工商網監
評論