 車載通信技術(二): 車內總線通信技術
車載通信技術(二): 車內總線通信技術
第一篇文章提到,汽車相關的通信網絡,可分為車內有線連接網絡和車外無線連接網絡。隨著智能網聯汽車的發展,對車輛內、外通信的需求越來越高,也推動著車內網絡和車外網絡的發展。車載通信技術(一):汽車的網絡互聯技術
本篇主要來講解下車內總線技術。
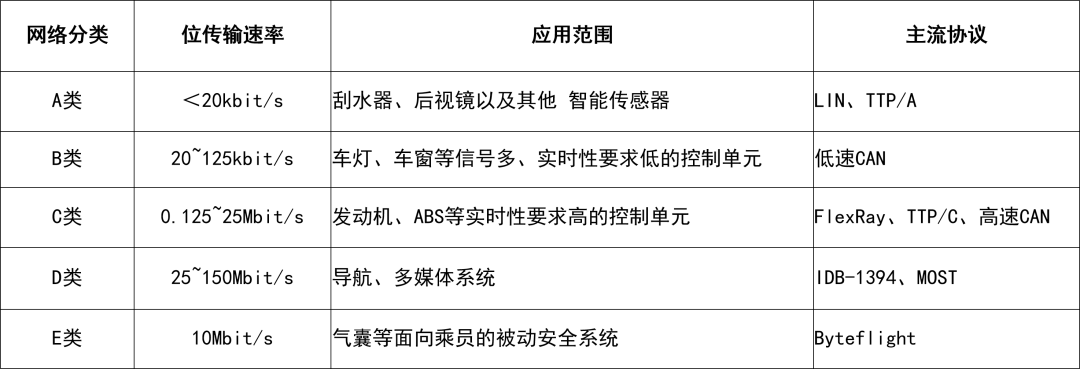
目前各個國家和公司存在多種車載網絡標準。美國汽車工程師學會(SAE)按照汽車上網絡系統的性能,把汽車網絡劃分為不同的等級標準,即A類、B類、C類、D類和E類。
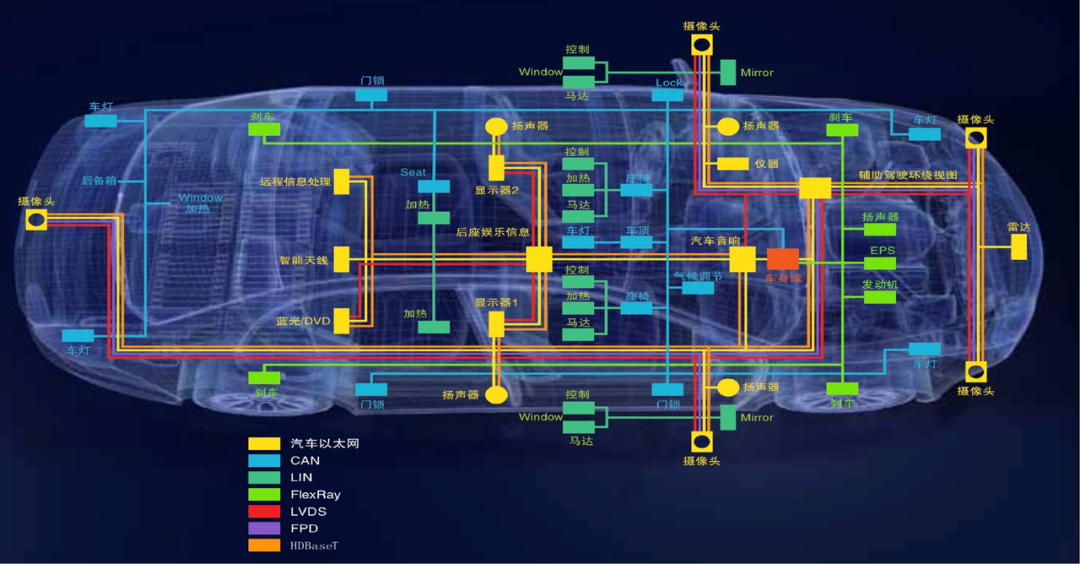
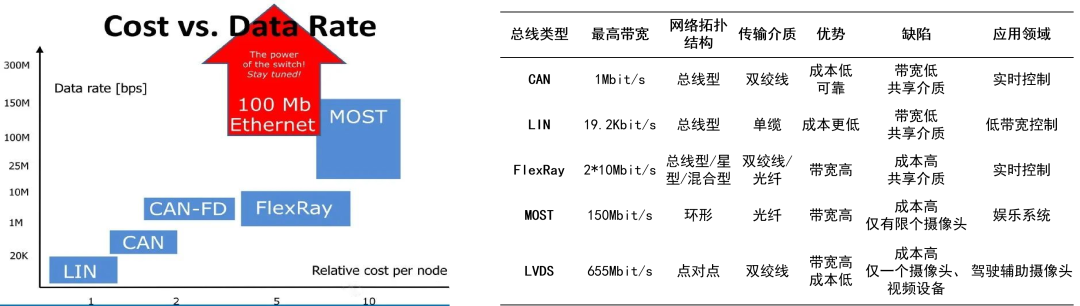
常用車內總線通訊技術有CAN、LIN、FlexRay、MOST和LVDS等。除LVDS外,其他都是專門為汽車行業設計的通信網絡。
一、CAN通訊技術
CAN 是一種世界標準的串行通訊協議,為數據高速公路確定統一的“交通”規則。CAN 是由ROBERT BOSCH 公司和Intel公司專門為汽車內數據交換開發的總線系統。CAN是一種總線型、串行通信、廣播式網絡,節點間通過雙絞線連接。它不僅能簡化車輛各電子控制單元的設計和安裝,還減輕布線的重量和降低了對空間的要求。
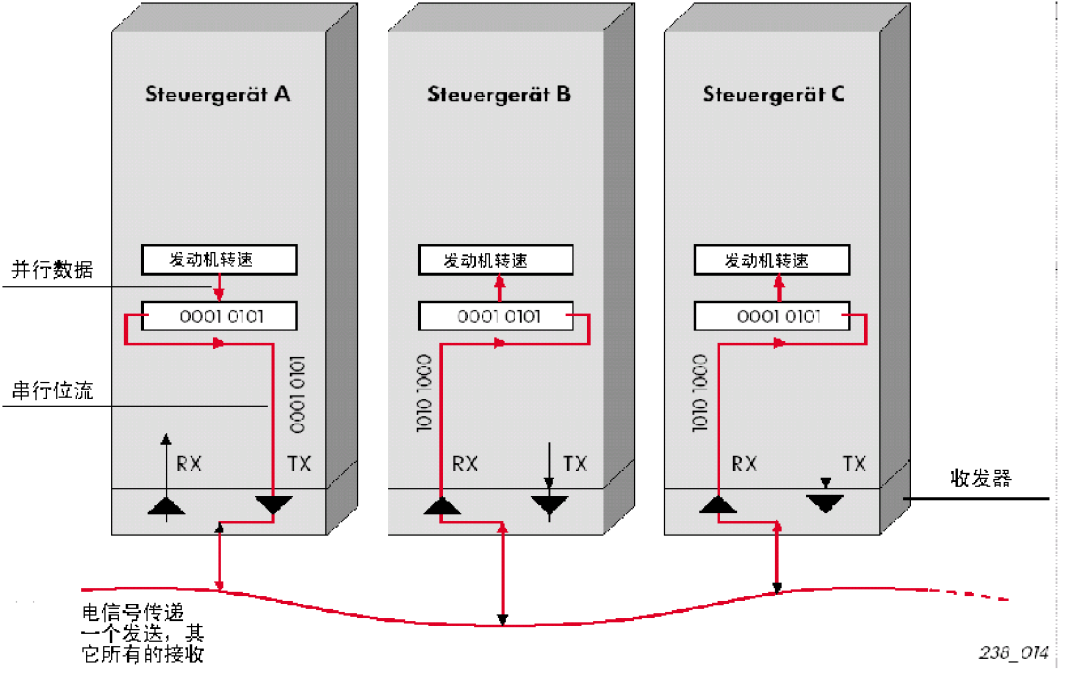
當一個節點要向其它節點發送數據時,該節點的CPU 將要發送的數據和自己的標識符傳送給本節點的CAN芯片,并處于準備狀態;
當它收到總線分配時,轉為發送報文狀態。CAN 芯片將數據根據協議組織成一定的報文格式發出;
網上的其它節點處于接收狀態。每個處于接收狀態的節點對接收到的報文進行檢測,判斷這些報文是否是發給自己的,以確定是否接收它。
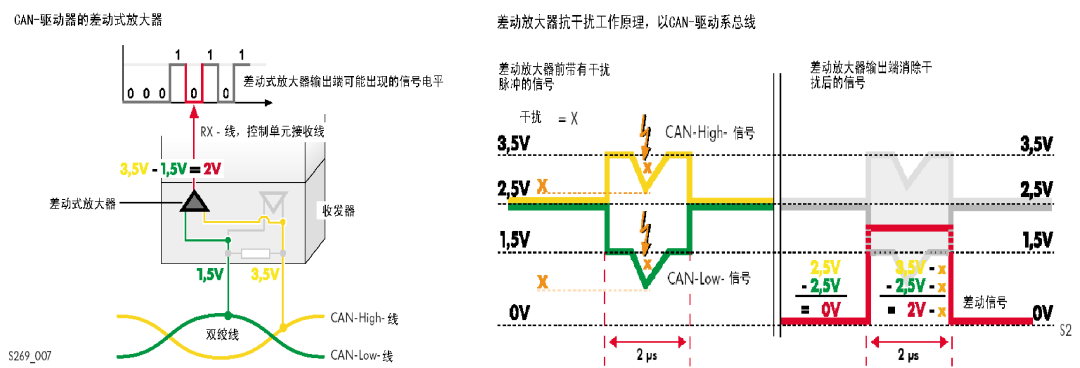
CAN控制器:接收由控制單元微處理器芯片傳來的數據。CAN控制器對這些數據進行處理并將其傳遞給CAN收發器;同樣CAN控制器也接收收發器傳來的數據,處理后傳遞給控制單元微處理器。CAN收發器:具有接收和發送的功能。它將CAN控制器傳來的數據轉化為電信號并將其送入數據傳輸線;同樣也為CAN控制器接收和轉化數據。數據傳輸線:它是雙向的,對數據進行傳輸。這兩條線傳輸相同的數據,分別被稱為CAN高線和CAN低線。
CAN通訊具有抗干擾能力強的作用,而且信號是從雙線信號中獲取。
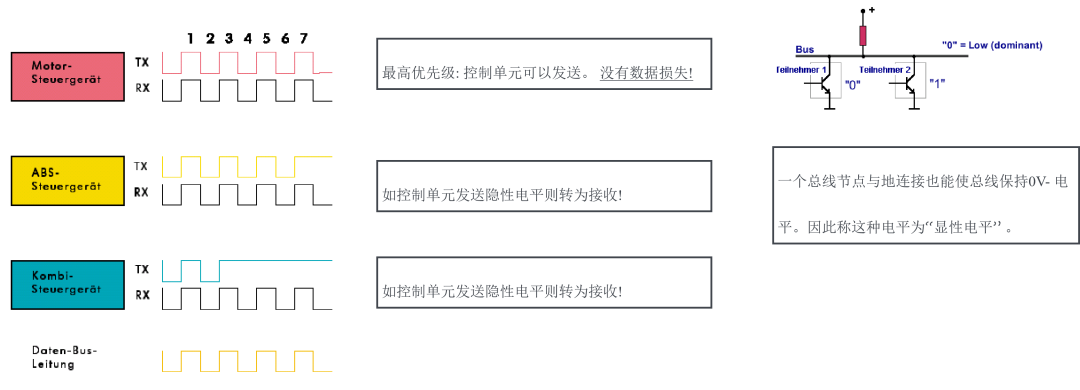
CAN仲裁機制
因內部時鐘的關系多個控制單元在信息流動時都要取用總線上的數據,因此只能等到信息結束(至少連續出現11個隱性電平)。信息結束時多個控制單元又要同時發送數據。
解決方案:標識符表示不同的優先級。最高優先級的電平為0,它可以覆蓋所有其它的電平。如果一個要發送數據的控制單元,其隱性電平被覆蓋了,那么它將停止發送而只能接收流動的數據。
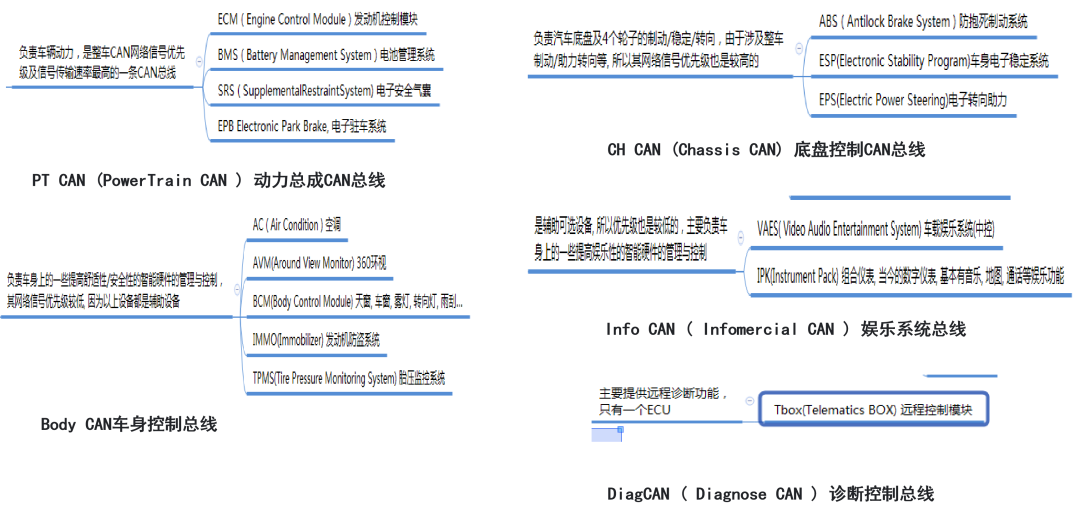
CAN一般燃油車的CAN網絡分類
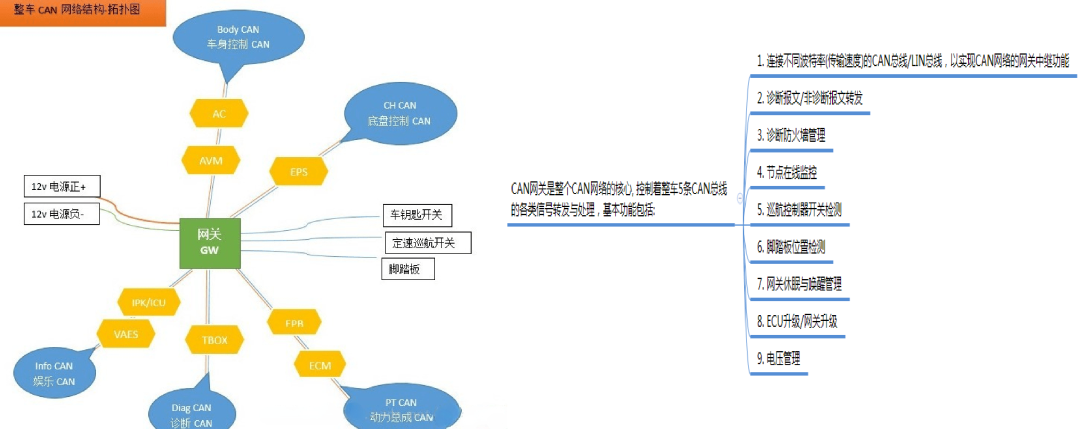
CAN網關是整個CAN網絡的核心, 控制著整車5條CAN總線的各類信號轉發與處理
二、LIN通訊技術
LIN,為局部連接網絡(Local Interconnect Nework),最初由奧迪、寶馬、大眾、摩托羅拉等汽車及其供應商組成的LIN聯盟提出。
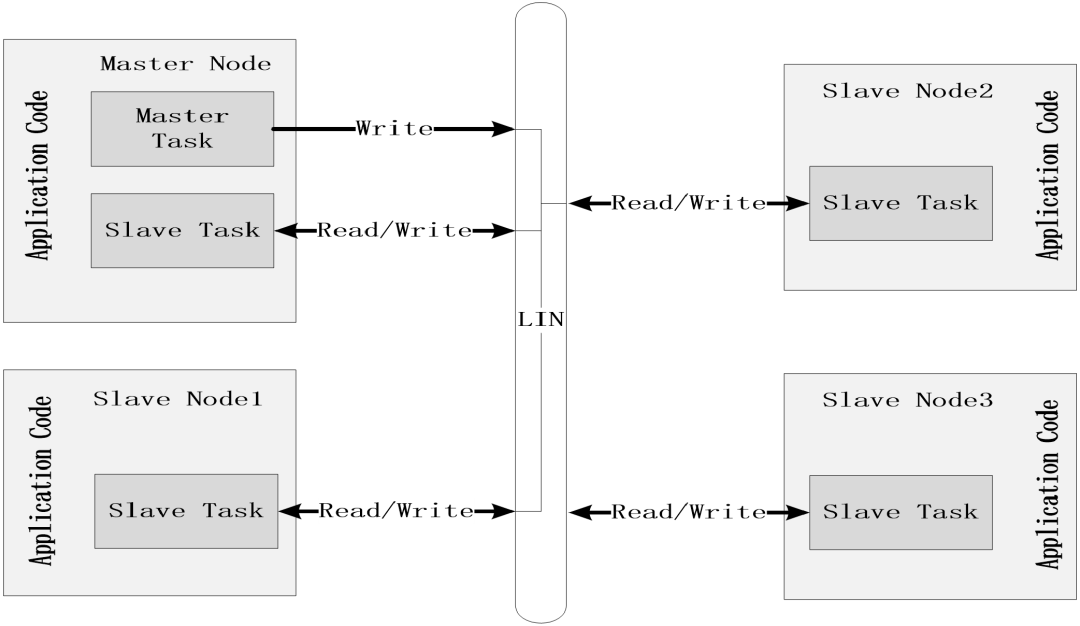
LIN是一種低成本、串行通信網絡,通信接口為UART。LIN分主節點和從節點,通過單線連接。LIN主要應用通信帶寬要求比較低車身控制方面,如車窗、座椅等,作為CAN通信補充。

基本工作原理
LIN總線上的所有通訊都由主機節點中的主機任務發起。主機任務根據進度表來確定當前的通訊內容,發送相應的幀頭,并為報文幀分配幀通道。
總線上的從機節點接收幀頭之后,通過解讀標識符來確定自己是否應該對當前通訊做出響應、做出何種響應。一個報文幀可以同時被多個節點接收利用。
三、FlexRay通訊技術
FlexRay總線數據收發采取時間觸發和事件觸發的方式。利用時間觸發通信時, 網絡中的各個節點都預先知道彼此將要進行通信的時間, 接收器提前知道報文到達的時間, 報文在總線上的時間可以預測出來。即便行車環境惡劣多變,干擾了系統傳輸, FlexRay協議也可以確保將信息延遲和抖動降至最低,盡可能保持傳輸的同步與可預測。這對需要持續及高速性能的應用( 如線控剎車、線控轉向等)來說,是非常重要的。
它采用了周期通信的方式, 一個通信周期可以劃分為靜態部分、動態部分、特征窗和網絡空閑時間4個部分。靜態部分和動態部分用來傳輸總線數據,即FlexRay報文。特征窗用來發送喚醒特征符和媒介訪問檢測特征符。網絡空閑時間用來實現分布式的時鐘同步和節點參數的初始化。
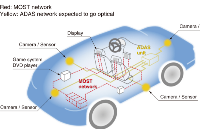
四、MOST通訊技術
MOST (Media Oriented System Transport) 面向媒體的系統傳輸總線,MOST 是汽車業合作的成果,而不具備正式的標準。它是一種專門針對車內使用而開發的、服務于多媒體應用的數據總線技術。MOST 表示“多媒體傳輸系統”。
MOST總線工作原理:MOST 總線利用光脈沖傳輸數據,采用環形結構,在環形總線內只能朝著一個方向傳輸數據。MOST 總線的傳輸技術近似于公眾交換式電話網絡( Public Switched Telephone Network;PSTN),有著數據信道(Data Channel)與控制信道(Control Channel)的設計定義,控制信道即用來設定如何使用與收發數據信道。一旦設定完成, 資料就會持續地從發送處流向接收處, 過程中不用再有進一步的封包處理程序, 將運作機制如此設計, 最適合用于實時性音訊、視訊串流傳輸。
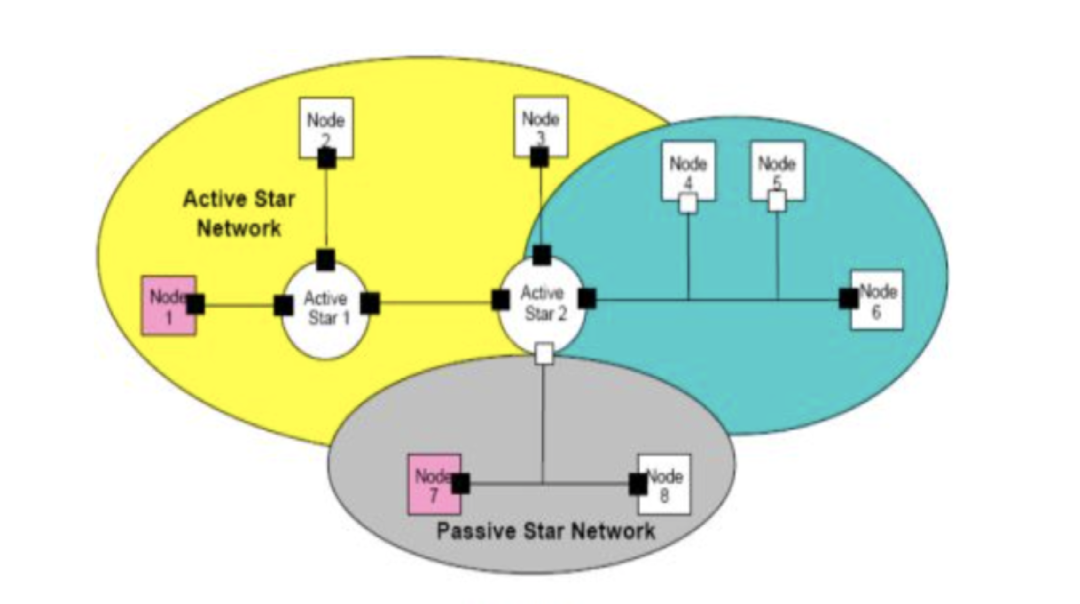
MOST在制訂上完全合乎ISO/OSI的7層數據通訊協議參考模型,而在網線連接上MOST采用環狀 拓樸, 不過在更具嚴苛要求的傳控應用上, MOST也允許改采星狀( 亦稱放射狀) 或雙環狀的連接組態,此外每套MOST傳控網絡允許最多達64個的裝置(節點)連接。

五、LVDS通訊技術
LVDS,為低電壓差分信號(Low Voltage Differential Signaling),是一種低壓差分高速信號標準。
LVDS 信號傳輸一般由三部分組成:差分信號發送器,差分信號互聯器,差分信號接收器。差分信號發送器:將非平衡傳輸的TTL 信號轉換成平衡傳輸的LVDS 信號。差分信號接收器:將平衡傳輸的LVDS 信號轉換成非平衡傳輸的TTL 信號。

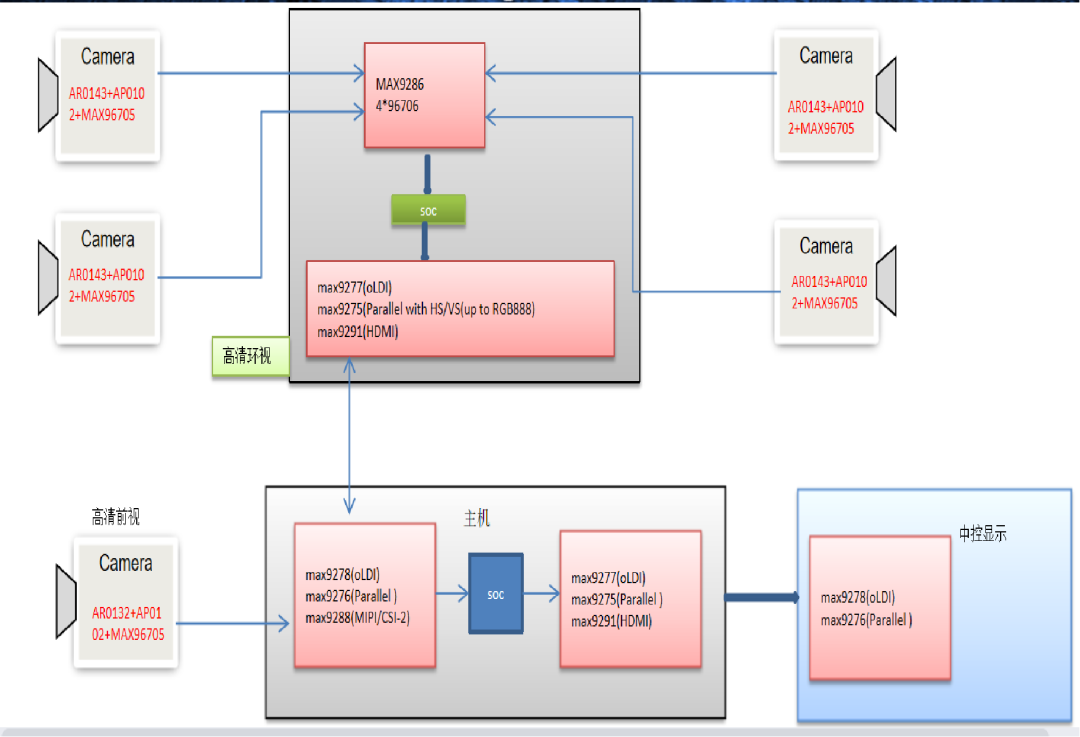
按目前汽車電子發展趨勢來看,汽車電子產品的架構形態逐漸由分布式向集中式域控制器方向發展。那么主機與顯示分域處理也將越來越多,分域處理的實質就是控制、功能、數據處理/保存等由主機完成,視頻及圖像顯示由顯示屏來完成,由于車內的結構特殊性,其分布的形態也不盡相同,這樣導致主機與屏可能相差10cm,也有可能相差100cm,甚至可能相距更遠。
目前行業中解決主機與顯示屏之間的音視頻、控制數據的傳輸方案,多是采用TI的FPD-link、美信的GMSL、THINE的V-by-One等相關技術。國內暫時還沒有看到集成串行及解串技術的芯片。

FPD-Link 串行器和解串器技術簡介:FPD-Link是TI研發的高速串行與解串接口,目前已經發展到了第三代。FPD-Link視頻數據速率達到350Mbit/s。FPD-LinkII傳輸速率可達1.8Gbit/s。FPD-Link III 在一個差分對上可以進行雙向通行,除了傳輸視頻數據外可以傳輸一些控制信號,傳輸速率大于3 Gbit/s。可用于傳輸I2C、IIS、I/F、UART、SPI、SMC 、PWM、ADC。主要研究廠家:TI。主要客戶:德系/日系/美系/國產等。
GMSL串行器和解串器。技術簡介:GMSL由MAXIM開發,實現對數字視頻和音頻數據進行串行轉換,然后通過一對雙絞線串行傳輸,后端由解串芯片進行解碼還原,最大傳輸速率可達6Gbps。可用于傳輸I2C、IIS、I/F、UART、SPI、SMC 、PWM、ADC。主要研究廠家:MAXIM。主要客戶:日系、國產等。
V-by-One串行器和解串器。技術簡介:V-by-One HS是由thine獨立開發的技術,利用1對線纜來傳輸高畫質影像的新技術,由1到8組訊號配對組合,每組訊號的最大傳輸速度為3.75 Gbps,總體訊號線輸出從4pin到18pin左右。可用于傳輸I2C、IIS、I/F、UART、SPI、SMC 、PWM、ADC。主要研究廠家:THINE、索喜(富士通)等。主要客戶:日系、國產等。
APIX串行器和解串器技術技術簡介:全稱Automotive Pixel link,Inova半導體公司的一項用于傳輸圖像和視頻數據的技術,APIX總線包含兩條屏蔽的成對雙絞線,可用于雙向數據傳輸,主要用于汽車娛樂信息系統的通訊。第一代技術傳輸速率可達1Gbps,第二代技術傳輸速率可達1Gbps,第三代技術可達12Gbps。主要用于傳輸I2C、IIS、I/F、UART、SPI、SMC 、PWM、ADC等。主要研究廠家:索喜(富士通)、東芝等。主要客戶:寶馬、路虎等。
LVDSFPDLIN&GSML
What does GMSL stand for? Gigabit Multimedia Serial Link (千兆多媒體串行鏈接)
What does it do?
Transports high-speed data such as video over a twisted pair or coax cable
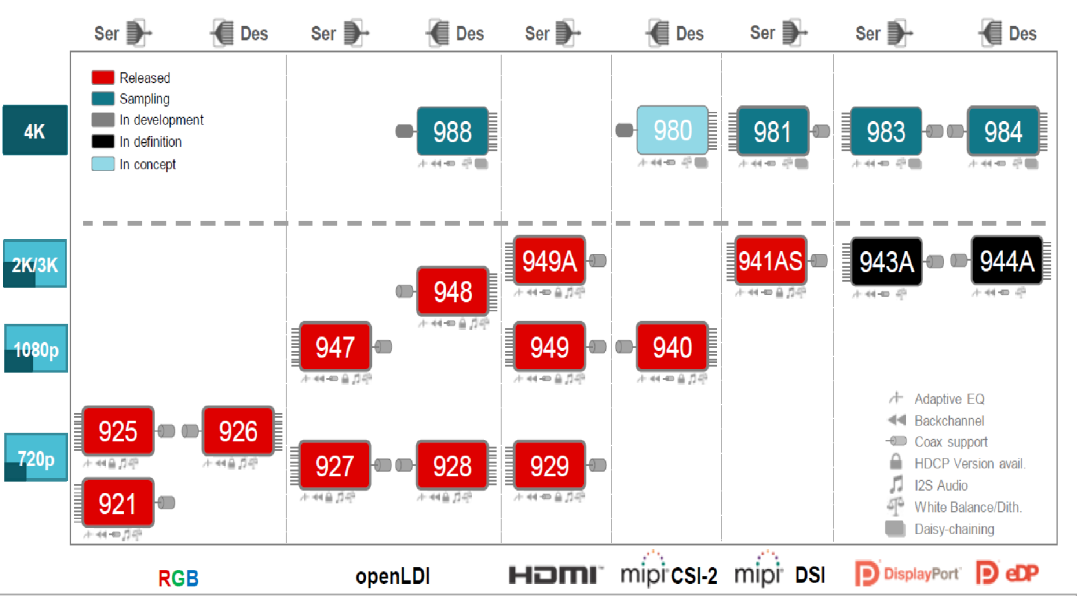
Supports a variety of video interfaces (RGB, OpenLDI (LVDS), MIPI CSI-2 & DSI, HDMI)
Aggregates video, audio and clock as well as bi-directional data onto one stream

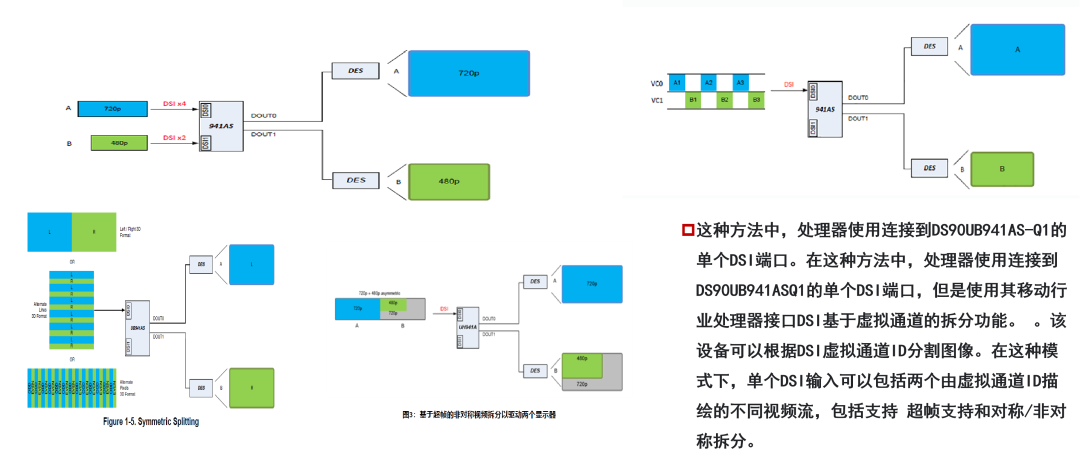
LVDSSplitter and Cropping
IVI 目前基本都有支持多個顯示屏,而部分處理器受限于視頻接口數量,故而產生 Splitter 應用;
Supper Frame and MST technology 支持2個視頻合并傳輸;
TI 941AS(or 98x)兼容 FPD-Link Ⅲ 的 Deserializer (92x or 94x);
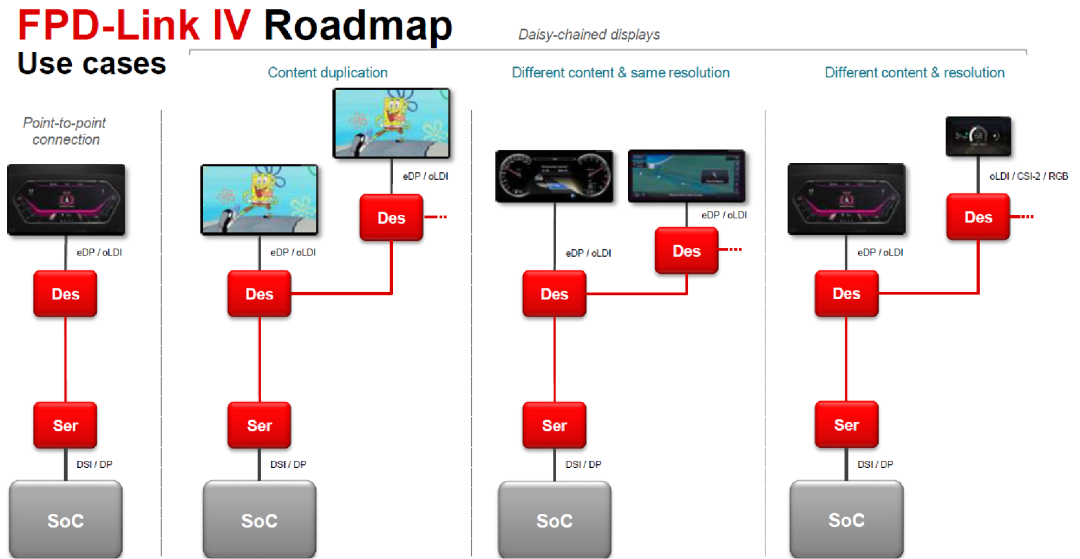
可以看到TI 的FPD-LINK IV支持的格式非常多種,而且對于高清2K,4K的車載顯示屏,直接支持的EDP接口,這樣可以直接點屏,而且還支持菊花鏈的串聯形式,這樣在布局走線的時候,可以有部分線材從從機端布局,這樣整體線材布局非常方便(比如娛樂駕駛的副屏,完全可以從中控主機這邊出線),這樣線材會變短,輻射沒有那么大,容易過EMC實驗,也節省成本,整體的布局也方便。
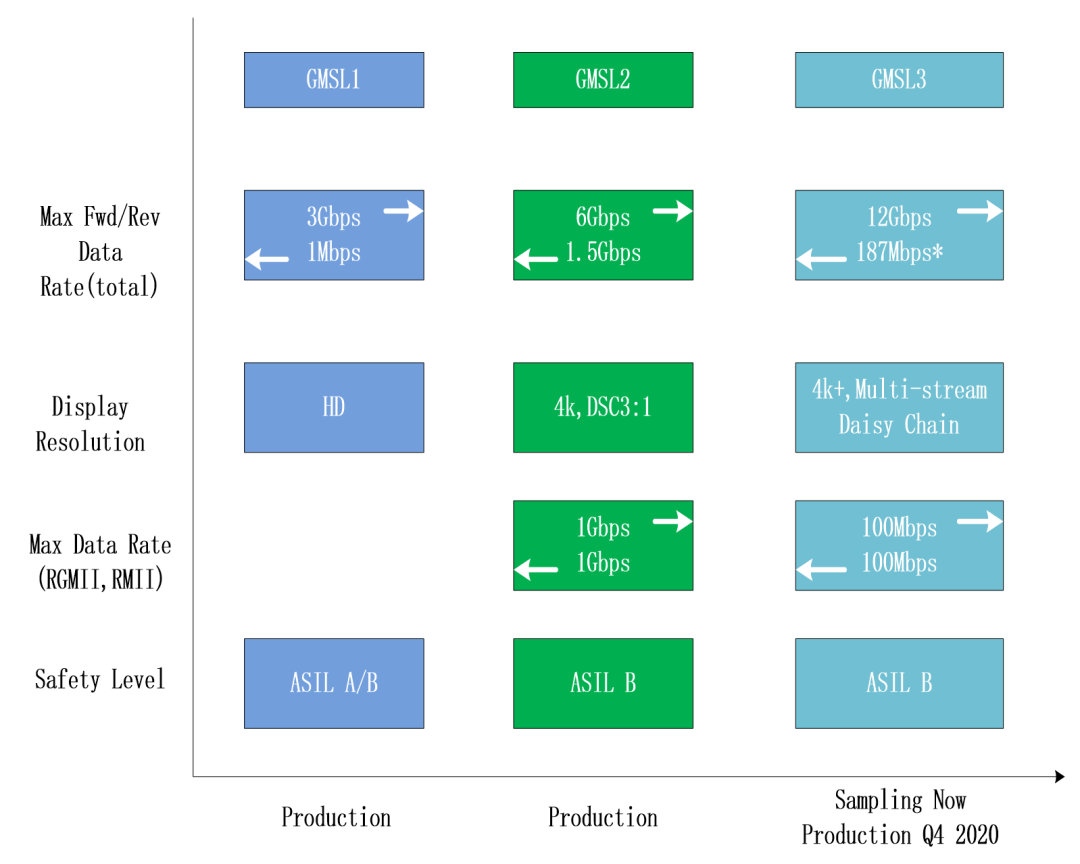
可以看到美信的GMSL 三代產品,有比較大的帶寬回傳技術,同時支持ASIL B的功能安全,在ADAS領域是非常具有優勢
六、車載以太網技術
各傳統車載網絡從帶寬和成本關系可看出,它們在帶寬和成本上所占據的范圍幾乎沒有重疊區域,并且成本和帶寬呈現遞增關系。這反映出網絡在汽車領域已被不同的車用總線所“瓜分”,而且這些總線在各自領域呈現出獨霸一方的局面。然而,隨著車載以太網的技術成熟和引入,面對著車載以太網海量的帶寬能力,對于跟車載以太網成本相當甚至更高FlexRay和MOST總線,以及其應用復雜等缺陷,可能有被淘汰的命運。
傳統車載網絡能滿足汽車部分子系統的要求,總體來說,優勢在于實時性。但普遍存在的問題是帶寬低,成本高。傳統以太網與車載以太網最大不同是傳統以太網需要2-4對線,車載以太網只需一對,且是非屏蔽的,僅此一項,可以減少70-80%的連接器成本,可以減少30%的重量。這是車載以太網誕生的最主要原因。同時也是為了滿足車內的EMC電磁干擾。
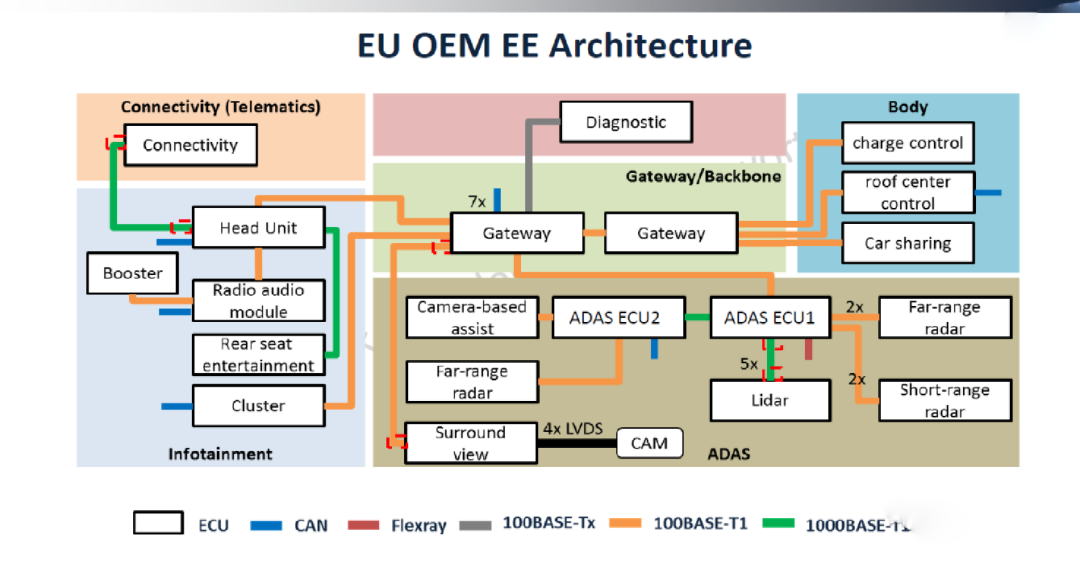
在車載網絡方面,玩家是很多的,也推出了各自的標準,如下:其中OPEN Alliance和電氣與電子工程師協會(IEEE)制定的標準是車載以太網領域比重最大和應用最廣泛的,例如我們熟知的100BASE-T1和1000BASE-T1。

自1980年以來,IEEE一直負責以太網的維護、開發和標準化。盡管各個公司都可提供專有的以太網解決方案,但大多數時候公司都會交給IEEE進行標準化以確保更廣泛的應用。802工作組則專門負責以太網,因此,所有與以太網相關的標準都以802開頭(例如,IEEE 802.1,IEEE 802.2,IEEE 802.3等)。
OPEN Alliance SIG是由汽車制造商和供應商組成的聯盟,目的是促進以太網在汽車工業中的進一步發展。OPEN Alliance SIG與IEEE合作,將汽車以太網轉換為通用標準。就目前的車載以太網標準方面,主流標準的是如下幾個,目前主要是第二個100BASE-T1:用單對雙絞線實現100Mbit/s的數據傳輸,走的靠前的OEM則使用更快的千兆以太網。
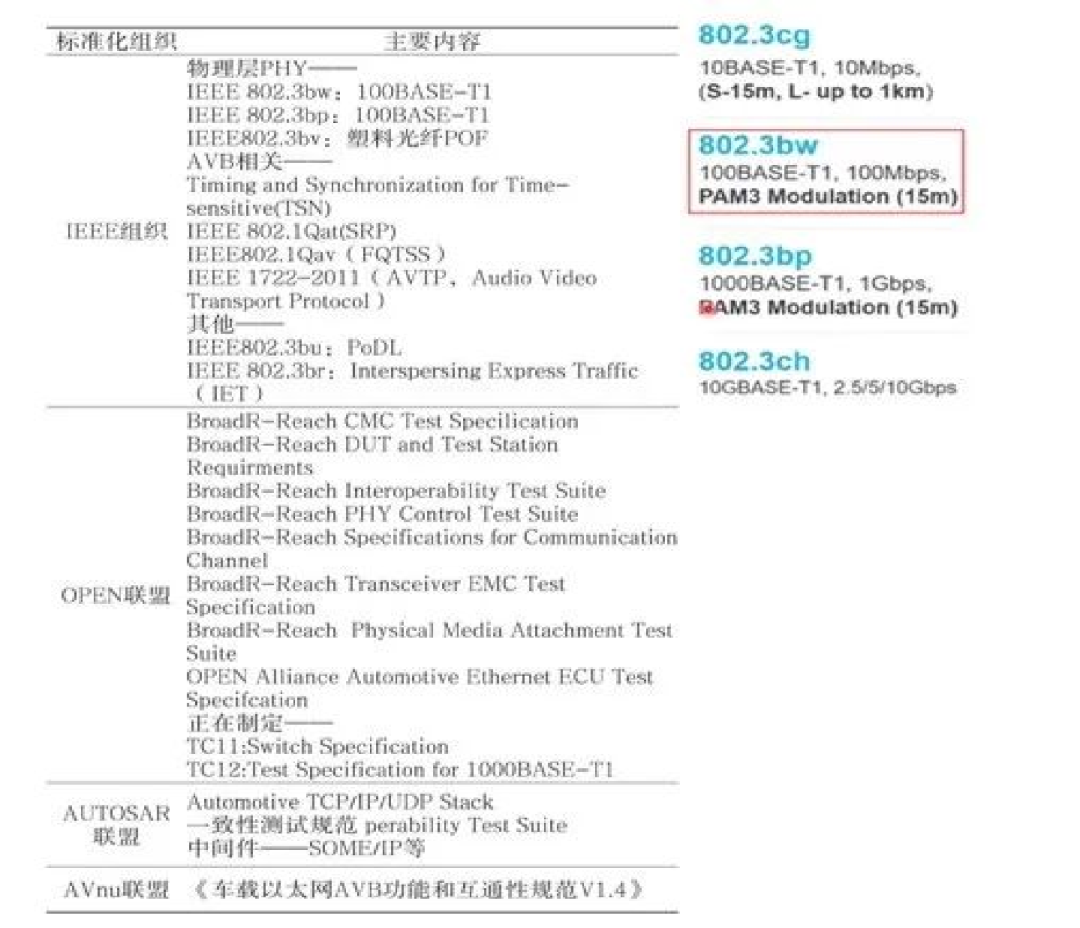
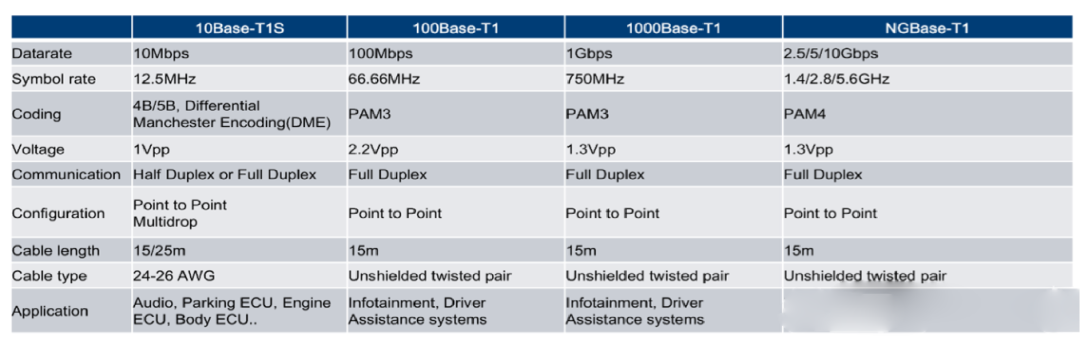
四個車載以太網物理層標準,10Base-T1S是試圖取代傳統的CAN網絡的。第一個1000Base-T1標準的物理層芯片是Marvell的88Q2112,雖然其推出時間是2015年10月,但在2019年才量產,典型應用如英偉達的旗艦盒子Pegasus。
2020年11月,博通宣布推出BCM8989X 和BCM8957X,BCM8989X是業內第一個對應NGBase-T1(即IEEE 802.3ch)標準的MACsec 物理層芯片,到目前為止,博通是唯一能提供NGBase-T1芯片的廠家。BCM8957X則是業內第一個支持10Mbps 到10Gbps速率的L2/L3級車載以太網交換機芯片。
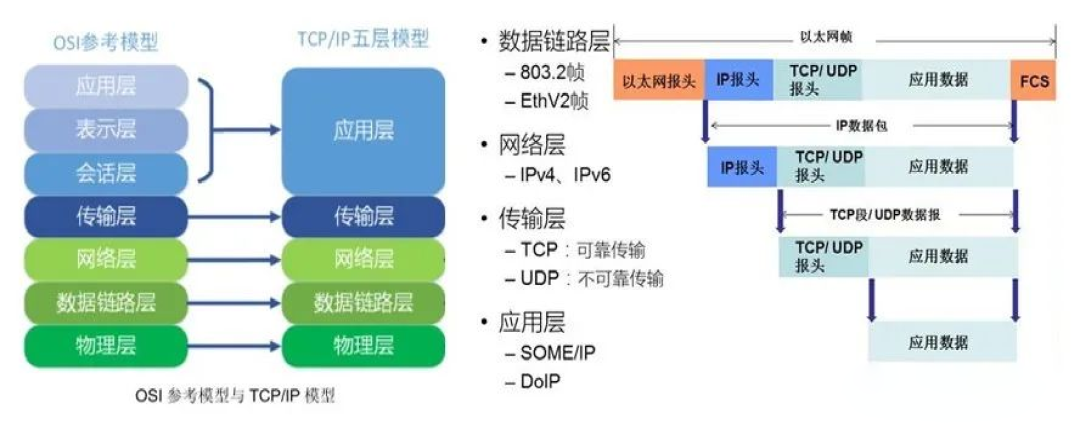
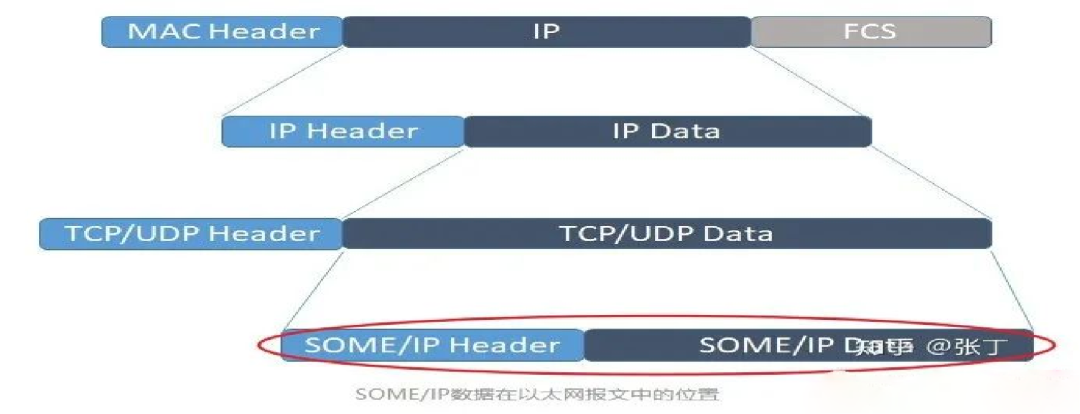
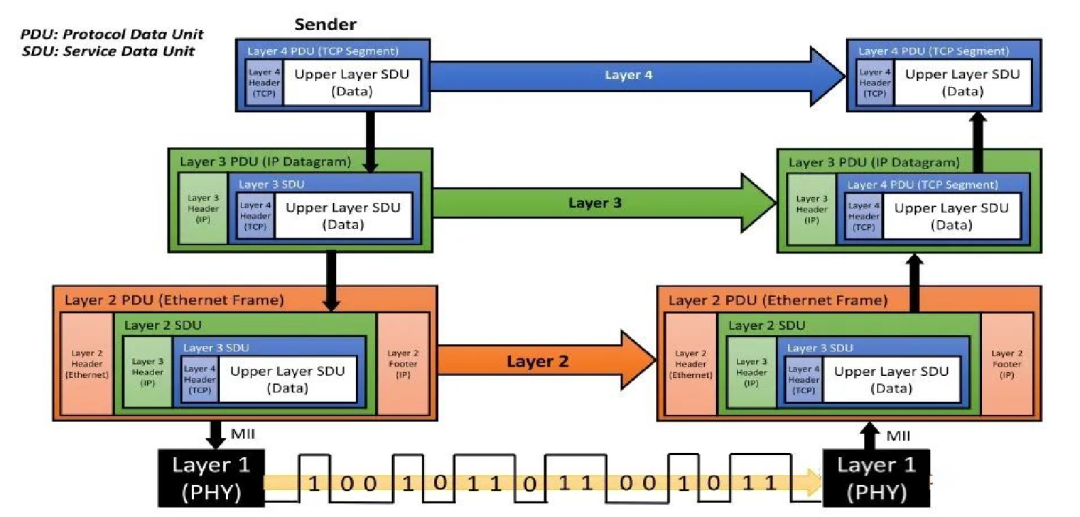
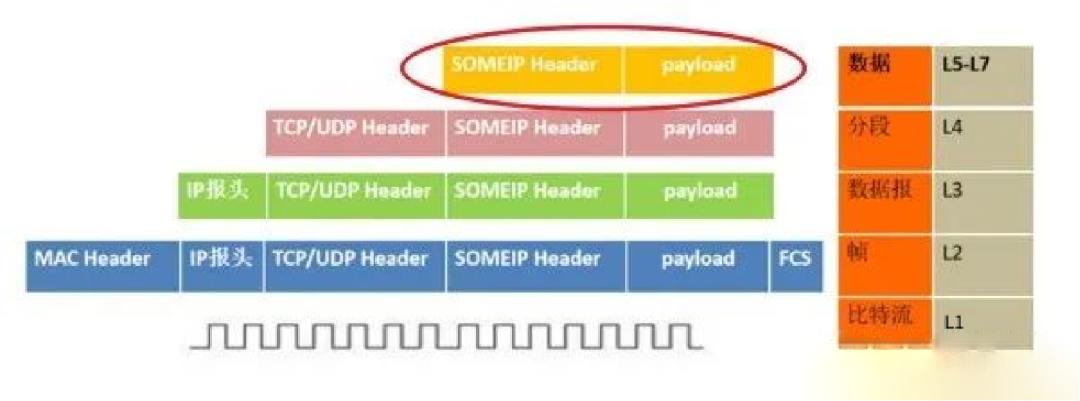
車載以太網是基于TCP/IP的網絡模型,因此我們先不考慮應用層數據是根據哪種應用層協議組織的,從應用層來的數據,經過傳輸層會加上TCP/UDP報頭,再到網絡層的IP報頭,然后到鏈路層增加MAC地址等信息,最后由PHY轉換成線路上的二進制流實現在發送端和接收端的數據傳輸。
車載以太網短期內無法全部取代現有CAN網絡,其在汽車行業上的應用需要一個循序漸進的過程,大致可分為 3 個階段:局部網絡階段、子網絡階段多子網絡階段。
局部網絡階段:可單獨在某個子系統上應用車載以太網技術,實現子系統功能,如基于 DoIP 協議的 OBD 診斷、使用IP 協議的攝像頭等;
子網絡階段:可將某幾個子系統進行整合,構建車載以太網子系統,實現各子系統的功能,如基于 AVB 協議的多媒體娛樂及顯示系統、ADAS 系統等;
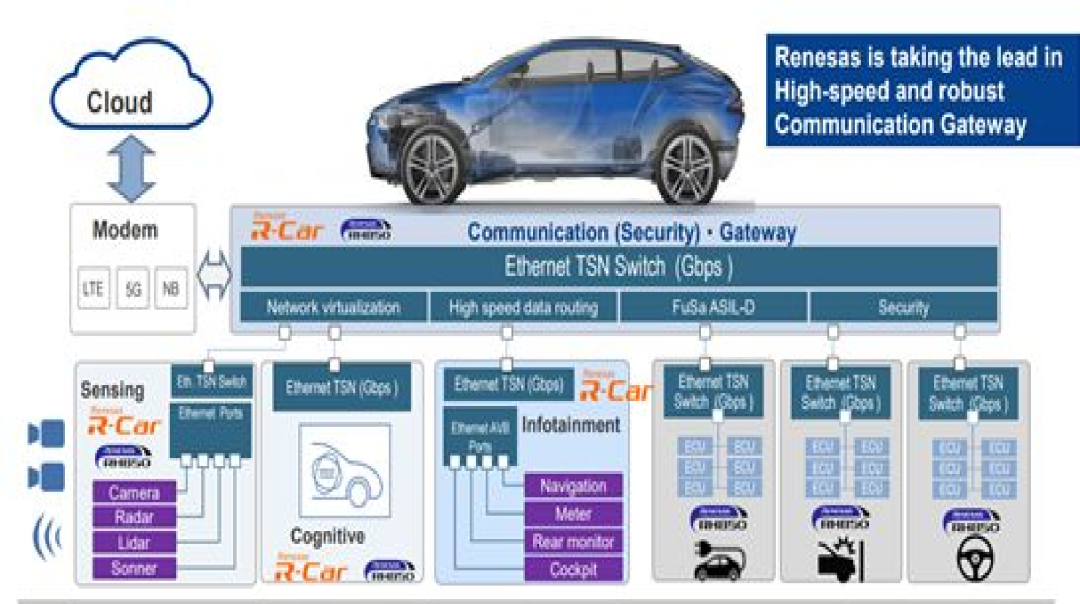
多子網絡階段:將多個子網絡進行整合,車載以太網作為車載骨干網,集成動力、底盤、車身、娛樂等整車各個域的功能,形成整車級車載以太網絡架構,實現車載以太網在車載局域網絡上的全面應用。
-
通信技術
+關注
關注
20文章
1093瀏覽量
92055 -
CAN
+關注
關注
57文章
2663瀏覽量
462463 -
智能網聯
+關注
關注
4文章
591瀏覽量
23186
原文標題:車載通信技術(二): 車內總線通信技術
文章出處:【微信號:阿寶1990,微信公眾號:阿寶1990】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
工業控制機常用總線技術有哪些
速銳得深入解析吉利幾何CAN總線數據通信網絡的拓撲層級框架技術

創新芯片設計與高性能電子元件 助力車載CAN提高通信速率
【技術分享】EtherCAT冗余技術如何實現通信線纜斷開的補救?

RS485與MODBUS RTU的區別 如何選擇合適的通信技術?
車載以太網10BASE-T1S通信解決方案







 工商網監
工商網監
評論