 前輪、后輪反饋控制算法介紹
前輪、后輪反饋控制算法介紹
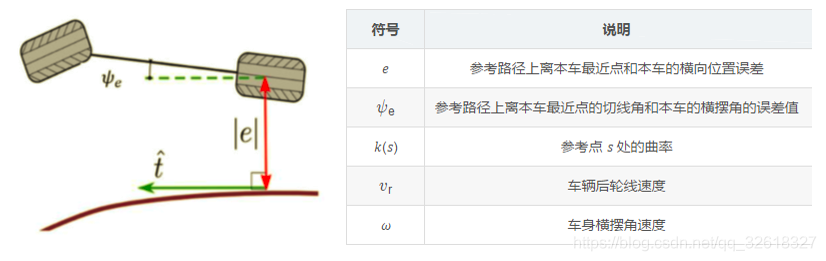
后輪反饋控制算法
后輪反饋式(Rear wheel feedback)是利用后輪中心的路徑跟蹤偏差量來進行轉向控制量計算的方法
Frenet坐標系使用道路的中心線作為參考線,使用參考線的切線向量和法線向量建立坐標系,那么基于參考線的位置,就可以使用縱向距離和橫向距離來描述任意位置。
同時縱向和橫向的速度、加速度、加加速度等信息也更便于計算。

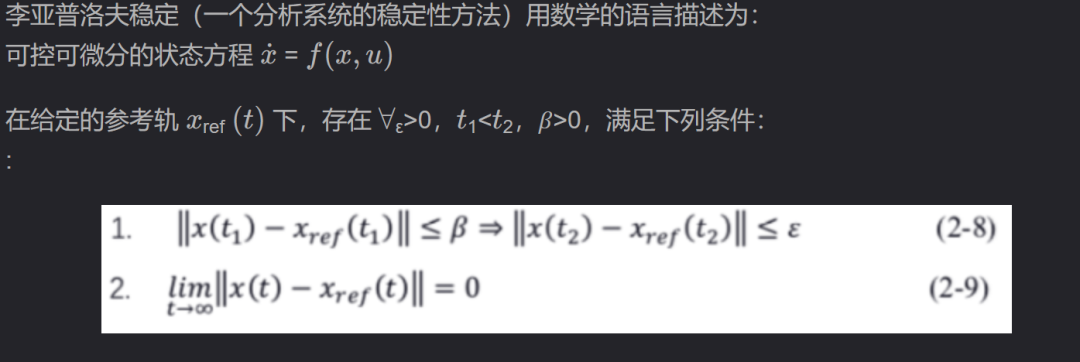
李亞普洛夫穩定性理論是從能量的觀點出發的,系統的能量隨著時間的推移不斷變化(增加or減少),在有限時間內,系統趨于穩定,能量不再變化。
此時,系統的k+1時刻的能量減去k時刻的能量是《0的,即V(k+1)-V(k)《0,V代表能量函數。
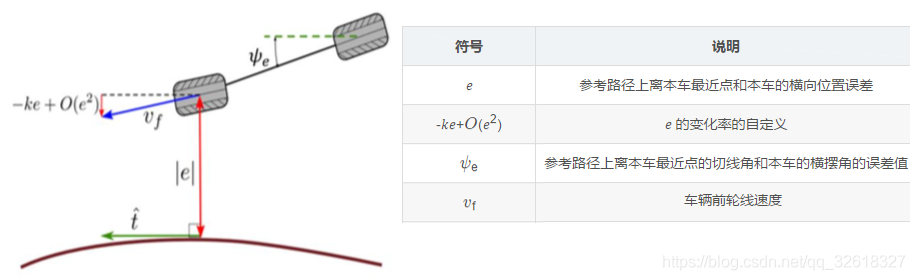
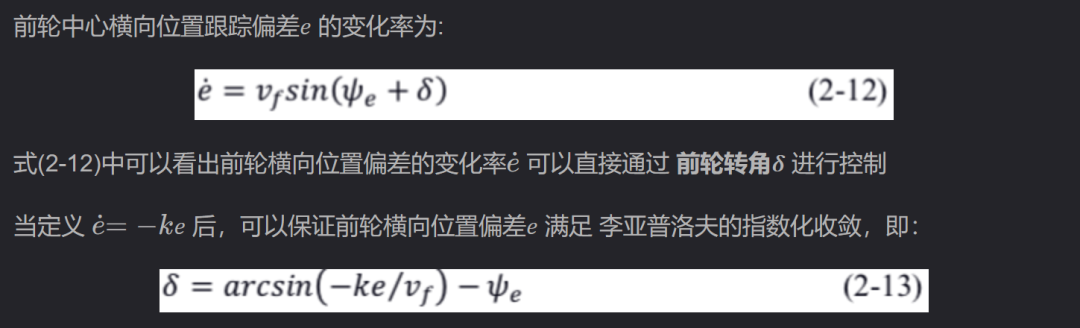
2.4 前輪反饋控制算法
前輪反饋控制(Front wheel feedback)又稱 Stanley控制,其核心思想是利用前輪中心的路徑跟蹤偏差量對方向盤轉向控制量進行計算。
李亞普洛夫指數:在相空間中相互靠近的兩條軌線隨著時間的推移,按指數分離或聚合的平均變化速率。
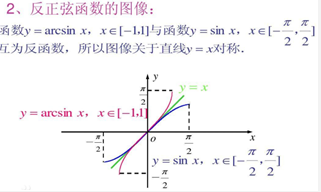
關于 arcsin函數:
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制算法
+關注
關注
4文章
166瀏覽量
21691 -
反饋控制
+關注
關注
0文章
61瀏覽量
20891 -
無人駕駛
+關注
關注
98文章
4038瀏覽量
120309
發布評論請先 登錄
相關推薦
時變移動通信系統功率控制算法與仿真研究
范圍以及系統的容量。功率控制的目標是能夠根據移動環境的變化快速調整發射功率的大小,使得既能夠保證一定的通信質量有不對其他用戶產生太大干擾。功率控制算法的好壞對系統性能有著直接的影響。本文簡要介
發表于 04-24 09:24
PID算法有點不懂,,反饋的控制量這么用正確嗎?
問題!!!---------------------------------------下面是一些關鍵性的代碼附件有源程序這是PID算法部分PID處理后的控制量反饋到rout處,在這里執行,分別是電機速度偏差大于0和小于0的情況
發表于 08-04 17:26
傾角傳感器在汽車四輪定位的特征?
(角)和前輪前束四個內容。對兩個后輪來說也同樣存在與后軸之間安裝的相對位置,稱后輪定位。后輪定位包括車輪外傾(角)和逐個后輪前束。這樣
發表于 03-24 06:13
如何利用單片機去設計一種智能車仿真系統呢
彎按鍵 小車左轉彎左前輪左后輪速度(兩端電壓)大概30左右右前輪右后輪速度(兩端電壓)大概50左右按下右轉彎按鍵 小車右轉彎左前輪左
發表于 02-23 06:08
汽車報警器電路圖
汽車報警器電路圖
主要功能:當系統檢測到汽車出現各種故障時進行語音提示報警。語音:左前輪;右前輪;左后輪;右后輪;胎壓過低;胎壓過高;請換電池;叮咚
發表于 05-23 10:19
?4098次閱讀
四輪轉向控制(4WS),四輪轉向控制(4WS)是什么意思
四輪轉向控制(4WS),四輪轉向控制(4WS)是什么意思
四輪轉向系統車輛轉向時,后輪的旋轉方向與前輪相反,以時轉彎半徑盡可能小并改善操縱特
發表于 03-11 17:43
?5496次閱讀
智能小車單片機程序及流程
設計分為5 個模塊:前輪 PWM 驅動電路、后輪PWM 驅動電路、軌跡探測模塊、障礙物探測模塊、光源探測模塊。前輪PWM 驅動電路用于轉向控制;后輪
發表于 07-12 17:50
?2168次下載

基于單片機智能車仿真系統設計-畢設課設
下左轉彎按鍵 小車左轉彎 左前輪左后輪速度(兩端電壓)大概30左右 右前輪右后輪速度(兩端電壓)大概50左右按下右轉彎按鍵 小車右轉彎 左
發表于 12-29 19:52
?0次下載

阿克曼小車仿真設計運動控制方案
阿克曼小車是一款經典的車模,小車模型后輪是通過電機直驅,前輪通過舵機控制前輪轉向角,前輪部分則是在模型中添加一個豎直的關節,使
發表于 03-13 09:59
?446次閱讀





 工商網監
工商網監
評論