") Ansys Motion凸輪軸(彈簧)剛?cè)狁詈蟿?dòng)力學(xué)仿真案例
Ansys Motion凸輪軸(彈簧)剛?cè)狁詈蟿?dòng)力學(xué)仿真案例
1
前言
當(dāng)結(jié)構(gòu)分析涉及彈簧部件時(shí),需要考慮到彈簧在初始狀態(tài)下可能存在多種張緊狀態(tài)。在傳統(tǒng)的結(jié)構(gòu)有限元仿真分析中,通常使用簡(jiǎn)化單元(例如彈簧力)來模擬彈簧的行為,并考慮其初始預(yù)緊力,或者使用實(shí)體彈簧單元,執(zhí)行從松弛狀態(tài)到緊張狀態(tài)的自由變形分析。雖然第一種方法易于建模,但其在分析彈簧的接觸力、振動(dòng)特性以及彈簧與其他組件接觸情況方面存在局限性。另一方面,盡管后一種方法提供了更多的分析可能性,但它的建模和分析過程復(fù)雜,計(jì)算求解時(shí)間較長(zhǎng)。
針對(duì)這類問題,Ansys Motion 作為一款專業(yè)的剛?cè)?a href="http://www.nxhydt.com/tags/耦合/" target="_blank">耦合動(dòng)力學(xué)仿真工具,可以更全面更高效的解決這類問題。Ansys Motion 在大變形,非線性摩擦接觸等,剛?cè)狁詈系确矫婢哂蟹浅?qiáng)的求解能力,同時(shí)通過 Motion 節(jié)點(diǎn)柔性體的形狀更新功能,能夠快速而準(zhǔn)確地模擬機(jī)構(gòu)的動(dòng)力學(xué)行為,其中包括彈簧單元的動(dòng)力學(xué)響應(yīng)。這種方法不僅能夠提供更精確的彈簧行為分析,還能夠綜合考慮彈簧與其他機(jī)構(gòu)部件之間的復(fù)雜互動(dòng),從而實(shí)現(xiàn)更全面的結(jié)構(gòu)動(dòng)力學(xué)仿真。
本文主要介紹如何使用Ansys Motion 進(jìn)行包含彈簧結(jié)構(gòu)的動(dòng)力學(xué)仿真,所使用的版本為Ansys Motion 2023 R1。
2
仿真流程
目前,Ansys Motion 支持兩個(gè)平臺(tái)使用,一個(gè)是集成在Ansys Workbench平臺(tái)Wechanical 環(huán)境中,另一個(gè)是獨(dú)立版的Motion,分為前處理器motion pre 2023 R1和后處理器motion post 2023 R1,用戶可根據(jù)習(xí)慣選擇熟悉版本,本文以Motion 獨(dú)立版為例進(jìn)行介紹。
2.1 分析方法
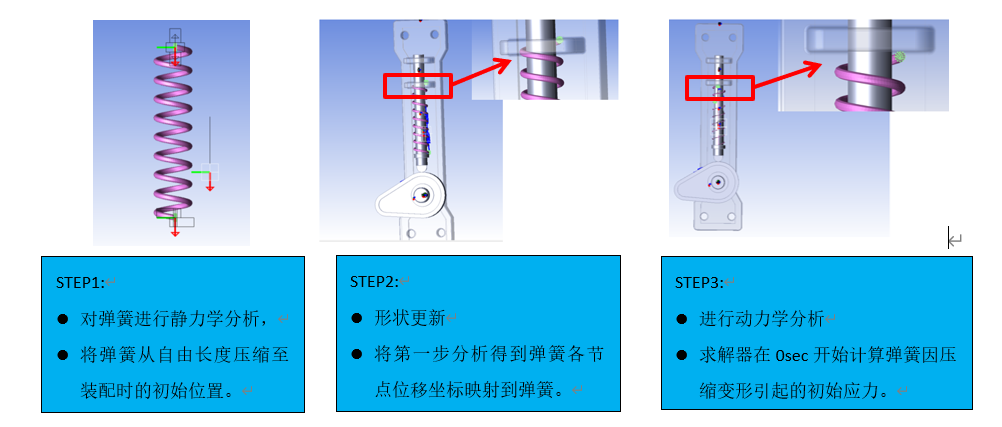
在此分析中,將彈簧設(shè)為柔性體,在Motion中使用節(jié)點(diǎn)柔性體對(duì)彈簧進(jìn)行建模,其他部件設(shè)為剛體。首先對(duì)彈簧進(jìn)行靜力學(xué)分析,將彈簧從自由長(zhǎng)度移動(dòng)到裝配的初始位置,此時(shí)彈簧將受到初始預(yù)緊力,然后將位移數(shù)據(jù)映射到機(jī)構(gòu)分析中的彈簧。利用Ansys Motion 的形狀更新功能(update position)生成初始狀態(tài)。分析流程下圖所示。
2.2 預(yù)分析-彈簧靜力學(xué)分析
對(duì)于彈簧初始的模型,其自由狀態(tài)長(zhǎng)度比裝配后的初始狀態(tài)要長(zhǎng),在預(yù)分析時(shí),只對(duì)彈簧進(jìn)行靜力學(xué)分析,其他部件抑制,將彈簧建模為柔性體,導(dǎo)入有限元模型,然后,在彈簧底部添加固定副,彈簧頂部添加平移副,壓縮彈簧,使端部位于該位置上初始裝配位置,如下圖所示。
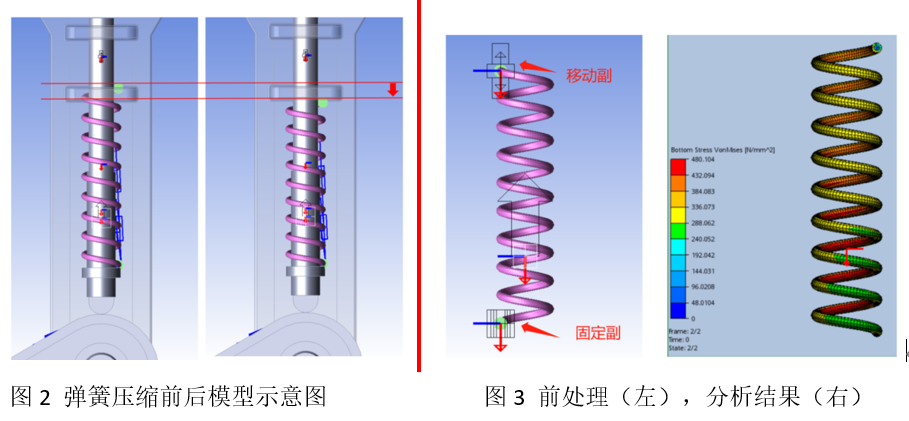
Ansys motion支持靜力學(xué)分析,彈簧靜力學(xué)分析網(wǎng)格可由Workbench Mechanical生成,并在Ansys motion中導(dǎo)入分析。
2.3 柔性體形狀更新
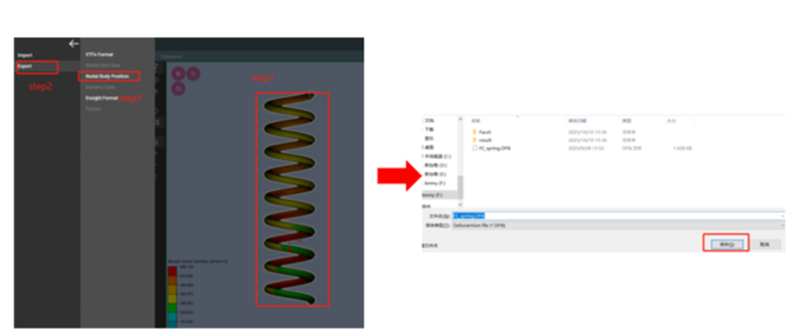
利用Ansys Motion 的形狀更新功能,在求解完成后,可以在后處理器motion porst中按照指定時(shí)間步輸出變形形狀的位移到文件中,這里我們進(jìn)行的是靜力學(xué)分析,所以只需要輸出最后的結(jié)果即可。在進(jìn)行整體分析時(shí),可將此文件檢索到FEM模型中,以便在更新初始網(wǎng)格節(jié)點(diǎn)位置的情況下進(jìn)行分析。操作流程如下:
在motion post中選擇模型-export-nodal body-保存
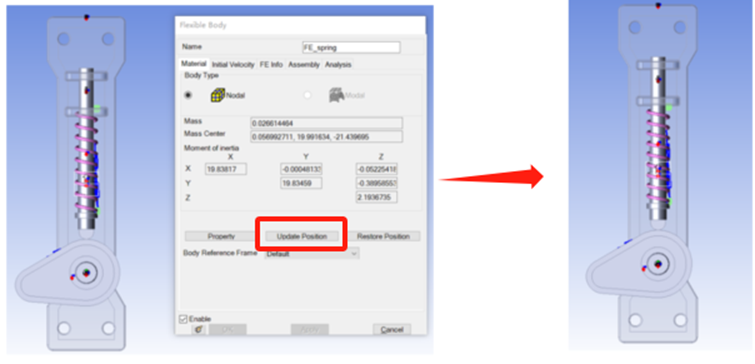
在motion pre中選擇彈簧對(duì)象屬性,使用update position更新形狀。
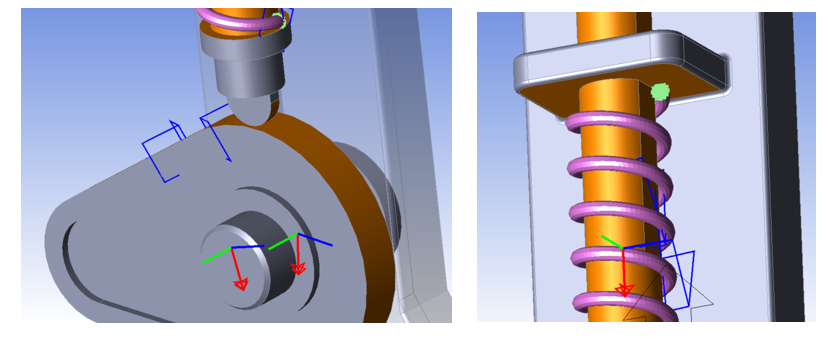
2.4 設(shè)置運(yùn)動(dòng)副和接觸
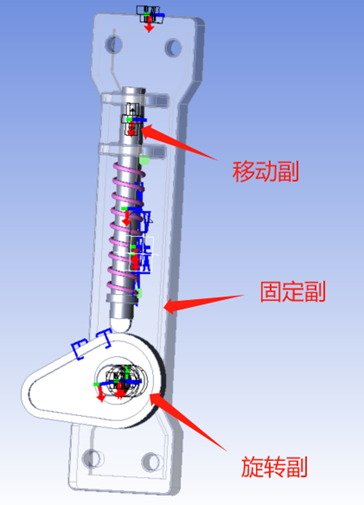
運(yùn)動(dòng)副定義了每個(gè)零件之間的平移,固定和旋轉(zhuǎn)關(guān)節(jié)(如下圖所示)。對(duì)于凸輪旋轉(zhuǎn),我們定義了強(qiáng)制旋轉(zhuǎn),而不是扭矩,以便在定義的旋轉(zhuǎn)接頭上旋轉(zhuǎn)一次。
2.5 接觸設(shè)置
這里共有四個(gè)接觸對(duì),凸輪-移動(dòng)桿,彈簧與底座,彈簧與移動(dòng)桿,如下圖所示:
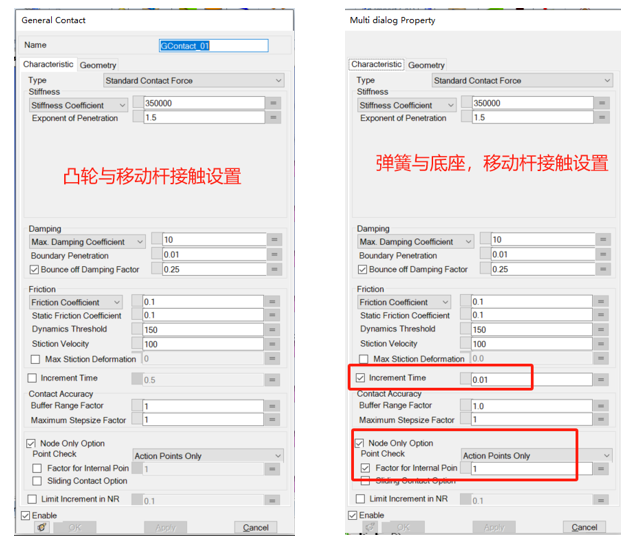
接觸屬性設(shè)置
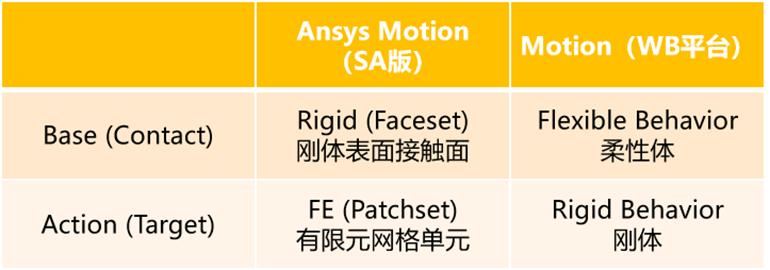
Mechanical環(huán)境中的contact對(duì)應(yīng)的獨(dú)立版中的Base,Target對(duì)應(yīng)Action ;
2.6 結(jié)果后處理
求解完成后,會(huì)自動(dòng)打開motion post后處理器,下圖為后處理器輸出的凸輪彈簧機(jī)構(gòu)動(dòng)力學(xué)仿真動(dòng)畫,以及接觸力時(shí)程曲線圖
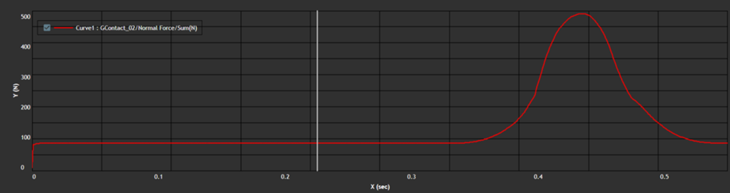
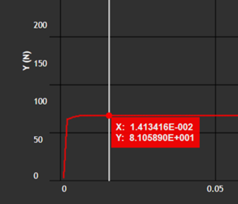
下圖顯示了彈簧和移動(dòng)桿之間的法向接觸力時(shí)程曲線圖,圖中形狀更新后初始位置(點(diǎn)a)和彈簧釋放壓縮位移達(dá)到平衡狀態(tài)(點(diǎn)b),通過形狀更新功能,motion求解器在求解時(shí)會(huì)自動(dòng)計(jì)算壓縮變形所產(chǎn)生的預(yù)應(yīng)力。點(diǎn)a的接觸力0[N],因?yàn)樗窃谛螤罡潞蟪跏冀Y(jié)果,即柔性體彈簧節(jié)點(diǎn)的位移被強(qiáng)制移動(dòng)到預(yù)分析中獲得的位移位置。相反,點(diǎn)b釋放了初始?jí)嚎s的彈簧,因此可以看到彈簧的恢復(fù)產(chǎn)生了81[N]的預(yù)緊力。
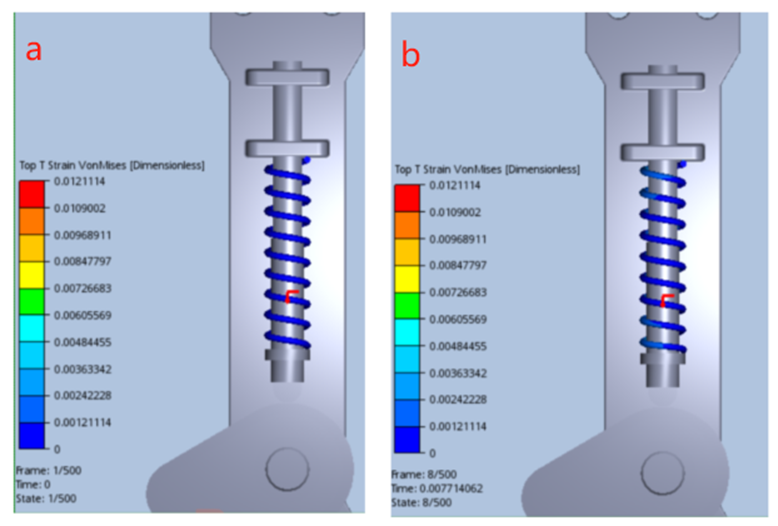
初始位置和平衡狀態(tài)位置結(jié)果
在motion post 后處理器中,可以輸出各部件的動(dòng)力學(xué)響應(yīng)結(jié)果,柔性體可以輸出應(yīng)力,應(yīng)變,變形量等結(jié)果。在此模型中,可以查看彈簧端點(diǎn)接觸的接觸狀態(tài),接觸力,摩擦力,接觸穿透值等。下圖為輸出的部分結(jié)果
下圖用標(biāo)記箭頭表示了與彈簧接觸的法向接觸力。根據(jù)彈簧的變形,還可以檢查彈簧兩端以及桿側(cè)面與彈簧之間的接觸(下圖中的放大部分)的接觸狀態(tài)。也可以用圖形顯示每個(gè)時(shí)間點(diǎn)結(jié)果。
彈簧變形結(jié)果和接觸面法向接觸力
3
總結(jié)
Ansys Motion作為一款專業(yè)的多體動(dòng)力學(xué)仿真分析軟件,在處理剛?cè)狁詈蠁栴},結(jié)構(gòu)大變形,高度非線性接觸等方面擁有強(qiáng)大的實(shí)力,motion采用隱式積分算法,提供不同類型的剛?cè)狁詈辖佑|模型,相比同類多體分析軟件,求解更容易收斂。若您對(duì)Ansys Motion以及多體動(dòng)力學(xué)仿真分析感興趣,歡迎來參加莎益博的培訓(xùn)課程,并與我們聯(lián)系。
-
仿真
+關(guān)注
關(guān)注
50文章
4040瀏覽量
133413 -
ANSYS
+關(guān)注
關(guān)注
10文章
237瀏覽量
36417 -
動(dòng)力學(xué)
+關(guān)注
關(guān)注
0文章
105瀏覽量
16960
原文標(biāo)題:Ansys Motion凸輪軸(彈簧)剛?cè)狁詈蟿?dòng)力學(xué)仿真案例
文章出處:【微信號(hào):ilinki,微信公眾號(hào):智匯工業(yè)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于多體系統(tǒng)動(dòng)力學(xué)的空氣懸架大客車平順性試驗(yàn)仿真研究
霍爾式凸輪軸位置傳感器的識(shí)別與檢測(cè)
凸輪軸位置傳感器
曲軸/凸輪軸位置傳感器檢測(cè)
光電式凸輪軸位置傳感器波形測(cè)試
發(fā)動(dòng)機(jī)凸輪軸轉(zhuǎn)速傳感器故障問題講解
什么是頂置凸輪軸(OHC)
關(guān)于汽車凸輪軸制造的分析和介紹
凸輪軸位置傳感器檢測(cè)_凸輪軸位置傳感器作用
凸輪軸位置傳感器壞了有什么影響
什么是凸輪軸位置傳感器它的作用是什么





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論