") 怎樣讓PPO訓練更穩(wěn)定?早期人類征服RLHF的馴化經(jīng)驗
怎樣讓PPO訓練更穩(wěn)定?早期人類征服RLHF的馴化經(jīng)驗
做一個專門面向年輕NLPer的每周在線論文分享平臺
寫在前面
今天給大家?guī)硪黄?strong>“如何穩(wěn)定且有效地訓練 PPO”的論文解讀,來自知乎@何枝(已授權)。在這篇文章中我們將學習:哪些技巧能夠穩(wěn)定訓練過程、哪些指標能夠代表著訓練的順利進行等內容。
作為 Reinforcement Learning 中的頂流算法,PPO 已經(jīng)統(tǒng)領這個領域多年。直到InstructGPT的爆火,PPO 開始進軍 LLM 領域,憑借其 label-free 的特性不斷拔高基座的性能,在 Llama2 、 Baichuan 的工作中都能看到 RLHF 的身影。
于是你開始摩拳擦掌,躍躍欲試,準備利用這項強大的技術來進化自己的基座。但當你信心滿滿地跑通訓練任務時,你看到的情況很有可能是這樣的:
 各種形形色色的失敗案例
各種形形色色的失敗案例盡管魯迅先生曾言:真的強化敢于直面慘淡的結果,敢于正視崩壞的曲線。但日復一復地開盲盒難免會讓人心臟承受不了,好在前人們留下了寶貴的馴化經(jīng)驗,今天讓我們一起看看“如何穩(wěn)定且有效地訓練PPO”。
知乎:https://zhuanlan.zhihu.com/p/666455333
Paper:https://arxiv.org/pdf/2307.04964.pdf
Code:https://github.com/OpenLMLab/MOSS-RLHF/tree/main
1. Reward Model 訓練
RL 的整個訓練目標都是圍繞著 reward 來進行,傳統(tǒng) RM 的訓練公式為拉開好/壞樣本之間的得分差:
 y_w 為 selected 樣本,y_l 為 rejecte 樣本
y_w 為 selected 樣本,y_l 為 rejecte 樣本但是,僅僅是「拉開得分差」這一個目標很有可能讓 RM 陷入到「鉆牛角尖」的困境中。
為了保持住 RM 的本質還是一個「語言模型」,文章在原本的 loss 中加入了對「好樣本」的 LM loss:
 在原來的 loss 基礎上順便學習寫出「優(yōu)秀樣本」,保持住模型能寫句子的能力
在原來的 loss 基礎上順便學習寫出「優(yōu)秀樣本」,保持住模型能寫句子的能力值得一提的是:文章中的 r' 是用了另外一個 RM' 來算 loss 的,RM' 的結構和 RM 一樣,只不過輸出的維度不是 1,而是 vocab_size。但其實我認為也可以使用一個帶有 ValueHead 的模型來既訓練打分又訓練寫句子,畢竟這 2 個任務都需要模型知道什么的句子是「好句子」—— 還能省顯存。
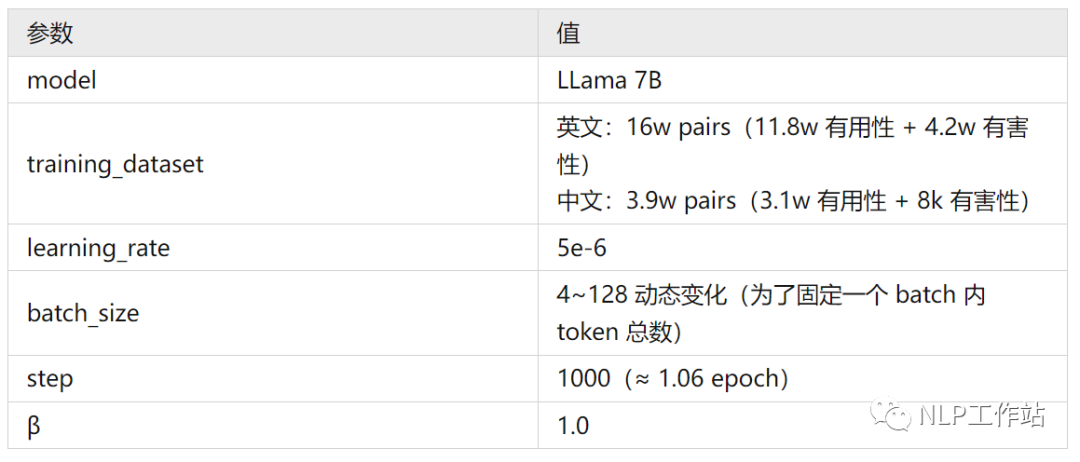
以下是論文訓練 RM 的詳細參數(shù):
一般的,我們會使用 prefered sample - disprefered sample 的分差來衡量 RM 的效果:
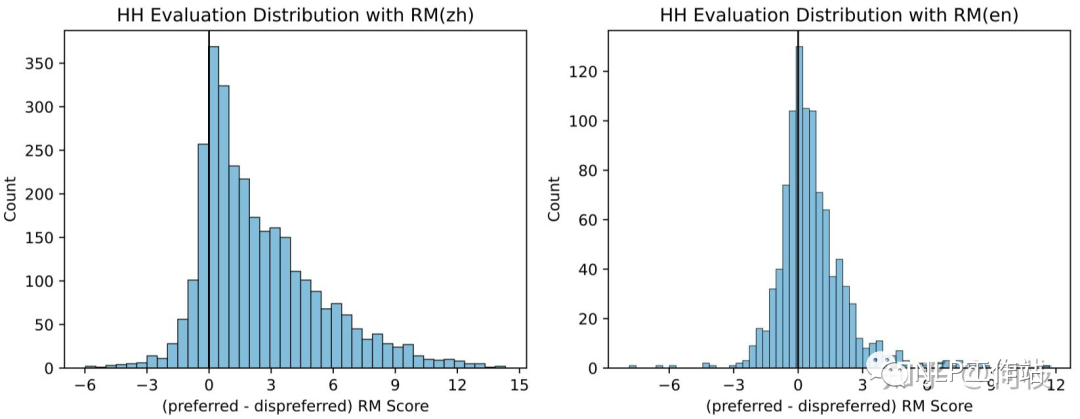 圖左為在中文標注數(shù)據(jù)集上的分差分布,圖右為在英文數(shù)據(jù)集上的分差分布(區(qū)分度不如中文)
圖左為在中文標注數(shù)據(jù)集上的分差分布,圖右為在英文數(shù)據(jù)集上的分差分布(區(qū)分度不如中文)完全理想的狀況下,prefered - disprefered 應該都在 0 的右邊(好樣本的分數(shù)更高),但考慮到標注中的噪聲、模型的擬合能力等,存在少小部分 0 左邊的樣本是合理的,拉出來人工評估下即可。
此外,文中還提到:只看 Acc 并不能夠很好的衡量 RM 的性能,但尚未給出其他可以衡量的指標。
2. PPO 的穩(wěn)定訓練方法
2.1 及時發(fā)現(xiàn)訓練過程中的異常
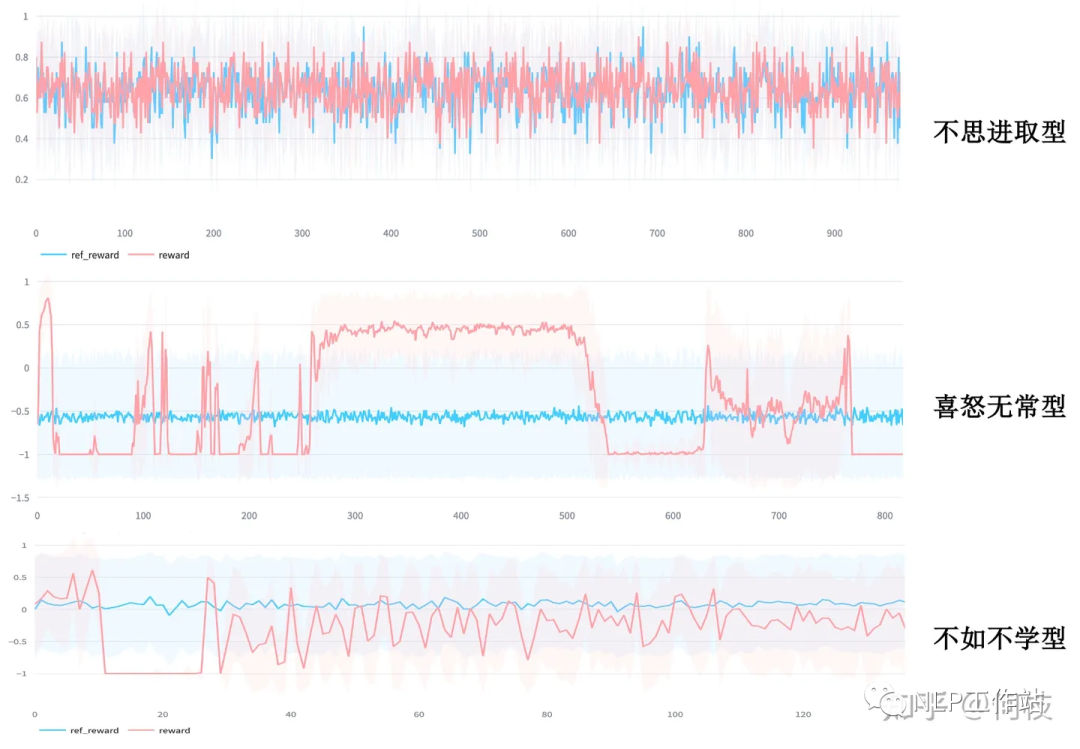
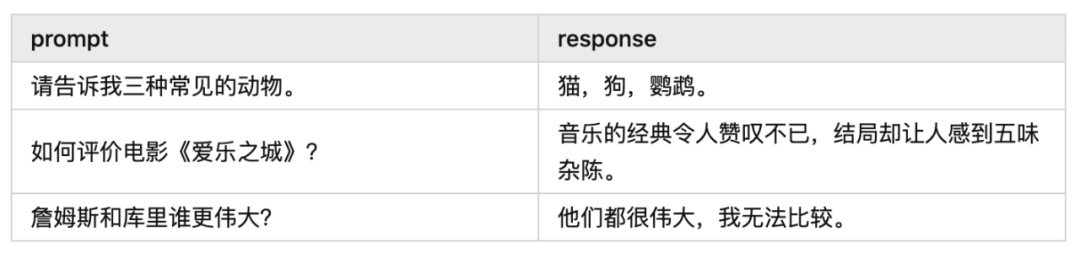
PPO 訓練中很常見的一個問題是「模式崩潰」,其典型特征為:長度很長且無意義的文字。
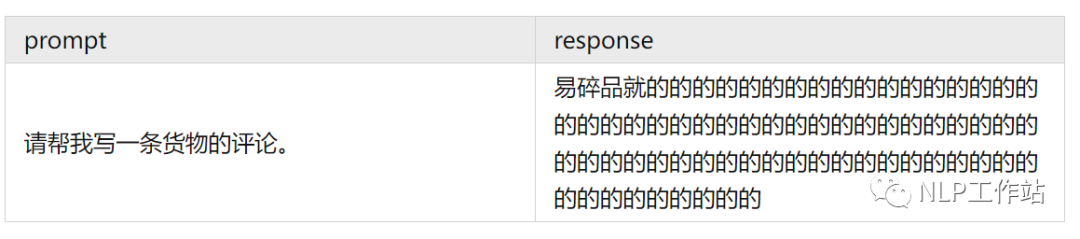
而對于這種「崩潰的輸出」Reward Model 往往還容易打出一個很高的分數(shù),這將導致我們無法在訓練過程中及時的發(fā)現(xiàn)問題,等訓完對著一個滿意分數(shù)的 checkpoint 看生成結果的時候才發(fā)現(xiàn)空歡喜一場。
對于上述這種問題,我們可以通過 3 個指標來監(jiān)控:KL、Response Length、Perplexity。
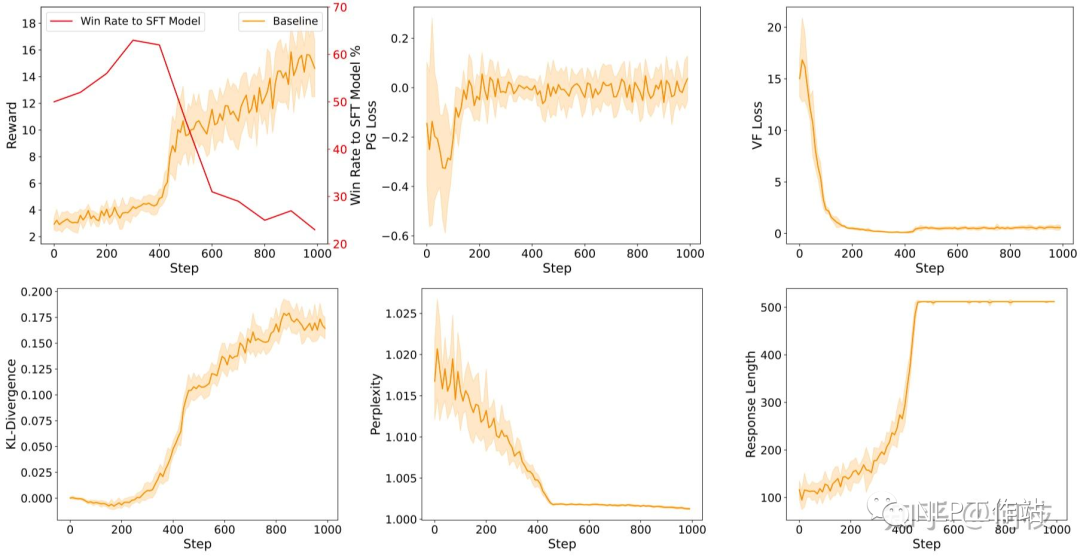 訓練過程中的各種指標,從約第 420 step 開始: 1. reward 出現(xiàn)驟增。2. KL 出現(xiàn)驟增。3. Perplexity 出現(xiàn)驟降。4. Response Length 出現(xiàn)驟增。5. 訓練效果出現(xiàn)驟降(圖左上紅線)
訓練過程中的各種指標,從約第 420 step 開始: 1. reward 出現(xiàn)驟增。2. KL 出現(xiàn)驟增。3. Perplexity 出現(xiàn)驟降。4. Response Length 出現(xiàn)驟增。5. 訓練效果出現(xiàn)驟降(圖左上紅線)因此我們可以總結出幾種指標異常的情況:
- Reward 出現(xiàn)驟增:很可能 Policy Model 找到了某條 shortcut,比如通過模式崩潰來獲得更高的分數(shù)。
- KL 出現(xiàn)驟增:同上,很可能此時的輸出模式已經(jīng)完全崩潰。
- Perplexity 驟降:由于 PPL 是指代模式對當前生成結果的「確定性」,一般來講,句子的生成都會帶有一定的不確定性,當 Policy Model 對某一個生成結果突然「非常確定」的時候(無論是什么樣的上文都很確定接下來應該輸出什么),那么它大概率是已經(jīng)擬合到了一個確定的「崩壞模式」上了。
- Response Length 驟增:這個對應我們之前給的 bad case,回復長度的驟增也可能代表當前輸出已經(jīng)崩潰。
2.2 Score Normalization & Clipping
PPO 的整個訓練都是圍繞優(yōu)化 Score 作為目標來進行的,和 Score 相關的變量有 2 個:
- Reward:由 RM(≈ Human) 直接給出的反饋。
- Advantages:由 Reward 和 Critic Model 共同決定的優(yōu)勢值,最終用于 loss 計算。
對于這 2 個值,我們都可以對其進行「歸一化」和「裁剪」。
Reward 的處理公式如下:
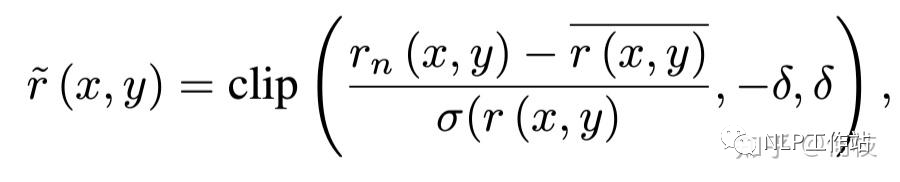 Reward Normalization & Clipping
Reward Normalization & Clipping上述式子將 reward 化成了一個均值為 0 的標準分布,均值為 0 是為了保證在訓練過程中得到的正負獎勵能夠盡可能的均勻,如果一段時間內全為負或全為正從直覺上來講不太利于模型學習。
文中提到,使用 clipping 可以限制模型進化的「最終分數(shù)」沒有那么高,鑒于之前「分數(shù)越高,并不一定有更好的效果」的結論,作者認為使用 clipping 對最終的效果是有益的。
至于 Advantages,在 PPO 的標準流程里已經(jīng)會對其進行 Normalization,而 advantage clipping 和 reward clipping 在本質上其實很相似,則只用在 reward 階段進行截斷即可,所以對于 Advantage 來講不需要做太多其他額外的操作。
2.3 Policy Loss 設計
在傳統(tǒng)的 PPO 流程中,我們通常會對 Policy Molde 的 Loss 上做以下 2 種操作:
- Importance Sampling:這是 PPO 中加快 On-Policy 算法訓練速度的關鍵步驟,即一次采樣的數(shù)據(jù)可以進行多次更新(通過系數(shù)補償)。這種方法通常和 KL 懲罰一起使用,實驗表明這樣能夠更加穩(wěn)定 PPO 的訓練,但對最終的效果會存在一定折損(所以最好的還是 1 輪 sample 只做一次 update,退化為原始的 PG 流程)。
- Entropy Loss:一般為了鼓勵 Policy 在進化的同時保留「探索」的能力,我們會在 loss 中加入 entropy(確定性)loss,但在 RLHF 中這項設置對超參非常敏感,很容易就崩掉。鑒于 KL 和 Entropy 有著相似的效果,因此作者更推薦使用 KL 來代替 Entropy Loss。
除了上述 2 個傳統(tǒng)設置外,RLHF 中加入一個新的指標:Token Level KL-Penalty。
在傳統(tǒng)的 RL 流程中,agent 每采取一個 action 后都會得到一個 action reward,對比到文本生成任務中,每新生成一個 token 就等于做出了一次 action,但實際上我們無法每生成一個 token 就打出一個分數(shù),我們只能在一個完整句子(Trajectory)生成完成之后打出一個 Total Reward。
這就比較痛苦了,當我們只有一個長序列的最后得分時,前面的每一個 step 的得分估計就變得非常困難。因此,為了避免「sparse reward」的同時限制 Policy Model 朝著「相對合理的方向」進化,我們會通過計算每個生成 token 與參考模型之間的 KL 來作為單個 token 的 reward 分數(shù)。
 式子的前半部分為 reward(discounted)后半部分為 KL 懲罰分數(shù)
式子的前半部分為 reward(discounted)后半部分為 KL 懲罰分數(shù)2.4 模型初始化
PPO 繼承自 Actor-Critic 框架,因此算法中一共包含 2 個模型:Actor 和 Critic。
- Actor Model(Policy Model)
Policy Model 是指我們最終訓練后使用的生成模型,Policy Model 需要具備一定基本的能力才能保證訓練的穩(wěn)定性,通常會選用 SFT 之后的模型。這個比較好理解,如果我們選用 Pretrained Model 為起點的話,探索空間會非常大,同時也更加的不穩(wěn)定(對 Reward Model 要求更高)。
- Critic Model
一種很直覺的想法是:同樣是「評判任務」,我們直接使用 Reward Model 來當作 Critic Model 就好了。
但其實這種想法不完全正確,從本質上來講 Critic 需要對每一個 token 的狀態(tài)進行打分,而 RM 是對整個句子進行綜合得分評估,這兩個任務還是存在一定的區(qū)別。
因此,一種更好的方式是:先訓練 Critic Model一段時間,直到 Critic Loss 降的相對較低為止。預先訓練能夠幫助在正式訓練的初期 Critic 能夠進行較為正確的 value 預估,從而穩(wěn)定訓練過程,至于使用 SFT 還是 RM 作為 Critic 的結構,實驗結果顯示并沒有非常明顯的區(qū)別。
2.5 最優(yōu)策略集合(PPO-max)
文章的末尾給出了作者匯聚了各種實驗結果給出的一套推薦的策略:
- reward normalize:使用歷史獲得過的所有 reward 的均值和方差進行標準化。
- token KL penalty:限制模型更新方向。
- Critic Model:使用 RM 初始化 Critic,并在 PPO 正式訓練之前先進行 Critic 預訓練。
- Global Gradient Clipping
- 使用相對較小的 Experience Buffer。
- Pretrain Loss:在 PPO 訓練 loss 中加入 Pretrain Language Model Loss,和 [InstructGPT] 中保持一致。
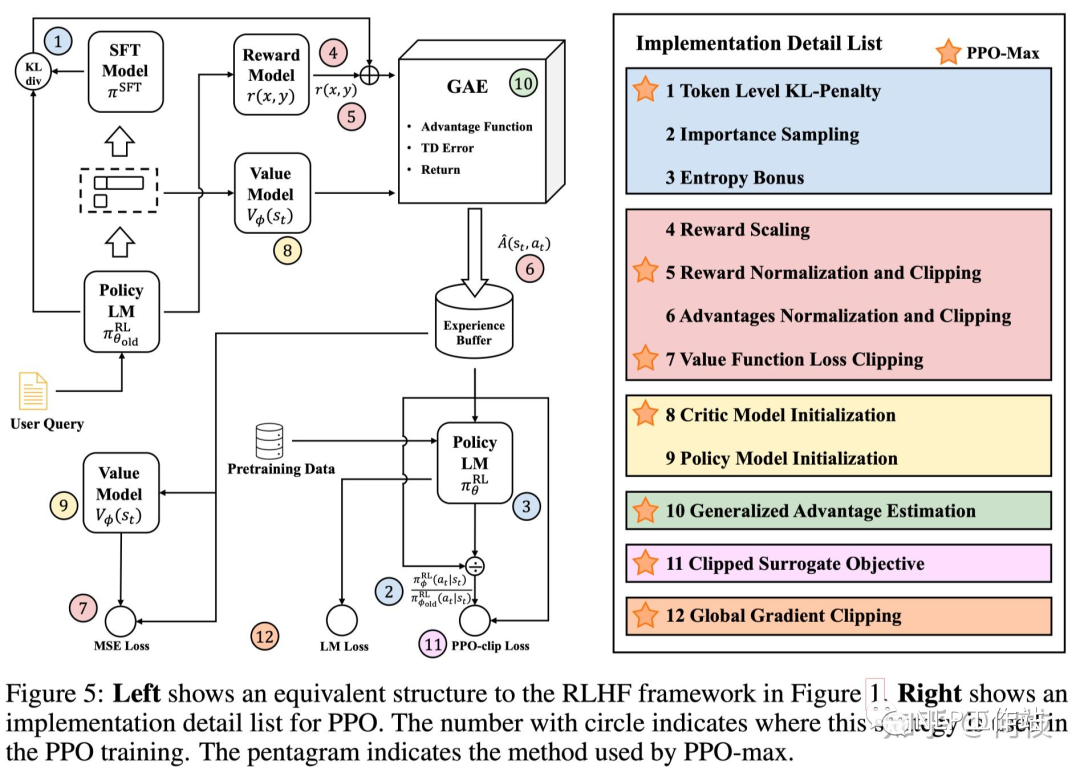 PPO-max 所使用的方法合集(標星的方法)
PPO-max 所使用的方法合集(標星的方法)
-
噪聲
+關注
關注
13文章
1118瀏覽量
47369 -
語言模型
+關注
關注
0文章
506瀏覽量
10245 -
LLM
+關注
關注
0文章
273瀏覽量
306
原文標題:怎樣讓 PPO 訓練更穩(wěn)定?早期人類征服 RLHF 的馴化經(jīng)驗
文章出處:【微信號:zenRRan,微信公眾號:深度學習自然語言處理】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
拆解大語言模型RLHF中的PPO算法
tas5711 DRC Time Constants怎樣配置出合理的時間使功率壓出更穩(wěn)定?
請問怎么讓組件更穩(wěn)定?
STM32與PIC對比分析?哪個更穩(wěn)定?
如何讓AGP顯卡工作得更穩(wěn)定

微軟開源“傻瓜式”類ChatGPT模型訓練工具
怎么讓直流調速更穩(wěn)?

RLHF實踐中的框架使用與一些坑 (TRL, LMFlow)

大語言模型(LLM)預訓練數(shù)據(jù)集調研分析
一種基于表征工程的生成式語言大模型人類偏好對齊策略

圖解大模型RLHF系列之:人人都能看懂的PPO原理與源碼解讀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論