 淺談CAN總線的一般沖突機制
淺談CAN總線的一般沖突機制
遇到的問題
問題的發現
最近在開發Canopen項目中,進行一主多從設備通信時,主站發送同步幀,兩個從站往往只有幀ID優先級高的設備可以讓主站接收到數據,而另一個從設備的數據往往接收不到。但當我關閉其中一個can從設備,另一個就可以和主站設備通信正常。經過排查發現,是由于Can的沖突解決機制的問題。
在CAN多機通信中,兩個設備同時發送數據,幀ID優先級高的CAN設備會“搶占”總線,而另外的設備需要選擇沖突解決策略。
CAN總線的一般沖突機制
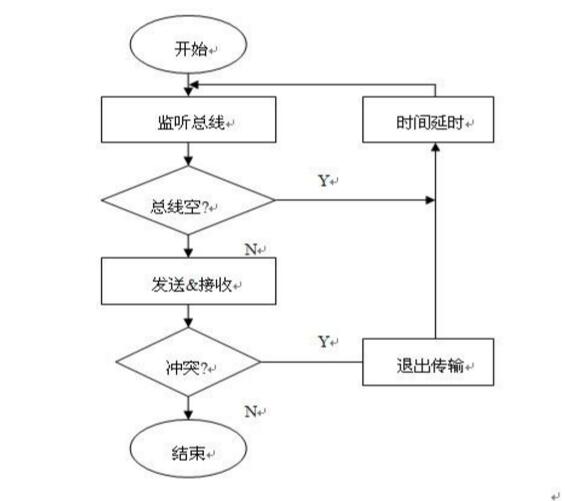
- 非破壞性搶占機制(Non-Destructive Arbitration): CAN 使用一種非破壞性的仲裁機制,這意味著當兩個節點同時發送消息時,通過識別消息標識符中的位的值來確定哪個消息具有更高的優先級。具體來說,CAN總線上的每個節點都會根據其消息標識符的比特值來判斷是否能夠“搶占”總線。
- 標識符比較: 在CAN總線上,每個節點在發送消息之前會監測總線上的信號電平。如果一個節點正在發送1,而另一個節點正在發送0,那么正在發送1的節點會發現沖突,并會停止發送消息。這種標識符比較機制有助于節點在發送消息時檢測沖突并進行沖突解決。
- 仲裁場(Arbitration Field): CAN消息包含一個仲裁場,它包含消息標識符。在這個字段中,CAN節點通過比較消息標識符中的位來決定哪個節點具有更高的優先級。較低優先級的節點將會自動停止發送,并等待較高優先級的節點完成其消息的發送。
- 回退機制: 如果多個節點嘗試同時發送消息,沖突解決后,較低優先級的節點會等待一段隨機時間后重新嘗試發送消息。這種回退機制有助于減少沖突的再次發生,提高總線的效率。
總的來說,CAN總線的沖突機制通過使用非破壞性的仲裁和標識符比較,以及回退機制,確保了多個節點之間的有序通信,使得總線上的消息能夠按照優先級順序進行傳輸。這種設計使得CAN總線非常適用于要求實時性和可靠性的應用,例如汽車控制系統。
STM32中的CAN沖突機制
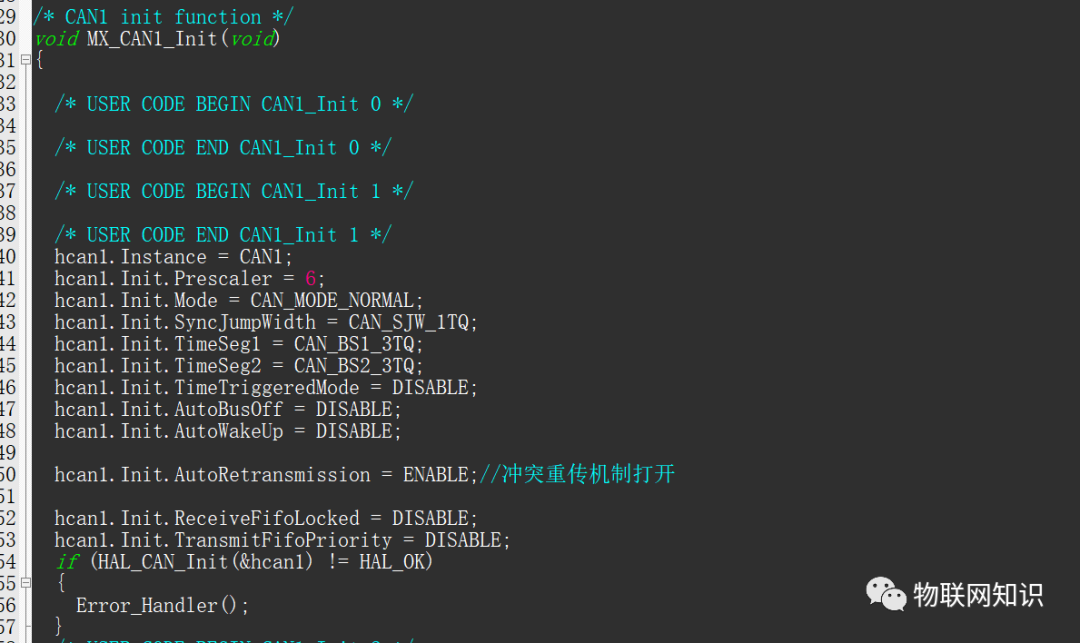
我們在進行CAN的多機通信時,往往希望不會丟幀。遇到CAN總線沖突時,受阻的CAN從設備進行自動回傳是我們需要的。而打開沖突回傳只需要在CAN初始時對AutoRetransmission 進行使能。
hcan1.Init.AutoRetransmission = ENABLE;
AutoRetransmission 是用于配置CAN控制器的自動重傳(Automatic Retransmission)功能。在CAN通信中,當節點發送消息但未收到確認時,可以選擇是否自動進行重傳。當 AutoRetransmission 被啟用(ENABLE)時,如果CAN控制器未收到確認,則會自動重傳先前的消息。這有助于提高消息的可靠性,特別是在有可能發生干擾或沖突的環境中。當 AutoRetransmission 被禁用(DISABLE)時,如果發送的消息未收到確認,控制器將不會自動進行重傳。在這種情況下,需要由軟件來處理重傳邏輯,開發者可以通過程序來控制何時以及如何進行重傳。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
CAN總線
+關注
關注
145文章
1936瀏覽量
130628 -
CAN
+關注
關注
57文章
2715瀏覽量
463365 -
通信
+關注
關注
18文章
5969瀏覽量
135850 -
STM32
+關注
關注
2266文章
10871瀏覽量
354789
發布評論請先 登錄
相關推薦



淺談局部網絡管理 基于CAN總線的局部網絡管理機制設計
CAN總線局部網絡管理機制及實現 近年來, 汽車 的節能問題備受關注,消減不必要的能源損耗是一種非常有效的方法。
發表于 04-12 17:32
?6985次閱讀

淺談總線通訊數據沖突的問題的解決
現場總線作為工業自動化系統中最后一段通訊的橋梁,越來越多的傳感器和執行機構都集成了CAN總線之類的通訊接口,但其固化的幾個通訊數據格式,面對當前眾多復雜的大系統,時常會給設計者帶來底層
發表于 11-13 11:18
?3330次閱讀
CAN總線與一般的通訊系統總線相比,它的優勢是什么
應用及與眾不同的設計方案。 CAN總線與一般的通訊系統總線對比,它的數據通訊具備突顯的可信性、實用性和協調能力,是一種合理適用分布式系統操縱
發表于 11-18 17:17
?2620次閱讀
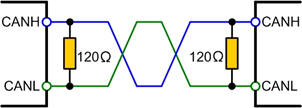
CAN總線終端電阻為什么是120Ω
CAN總線終端電阻,一般來說都是120歐姆,實際上在設計的時候,也是兩個60歐姆的電阻串起來,而總線上一般有兩個120Ω的節點,基本上稍微知
發表于 01-15 10:59
?3260次閱讀
淺談CAN總線終端電阻的作用
CAN總線終端電阻,一般來說都是120歐姆,實際上在設計的時候,也是兩個60歐姆的電阻串起來,而總線上一般有兩個120Ω的節點,基本上稍微知

CAN總線控制器的工作原理
CAN(Controller Area Network,控制器局域網)總線控制器的工作原理涉及多個方面,包括消息傳輸、沖突檢測與解決、總線仲裁等關鍵





 工商網監
工商網監
評論