") 國內(nèi)4D毫米波雷達(dá)廠商名錄
國內(nèi)4D毫米波雷達(dá)廠商名錄
4D毫米波雷達(dá)(也被稱為4D成像雷達(dá))可以實(shí)現(xiàn)類似于激光雷達(dá)的成像功能,而在成本方面只有激光雷達(dá)的10%-20%。那么,4D毫米波雷達(dá)在汽車自動(dòng)駕駛領(lǐng)域是最理想的傳感器嗎?
傳統(tǒng)毫米波雷達(dá)可以檢測物體的水平方位角(Azimuth)、距離(Range)和速度(Velocity),在此基礎(chǔ)上,4D毫米波雷達(dá)還能夠處理俯仰方位角(Elevation)信息,即四維數(shù)據(jù),可以說4D毫米波雷達(dá)是強(qiáng)化的毫米波雷達(dá)。
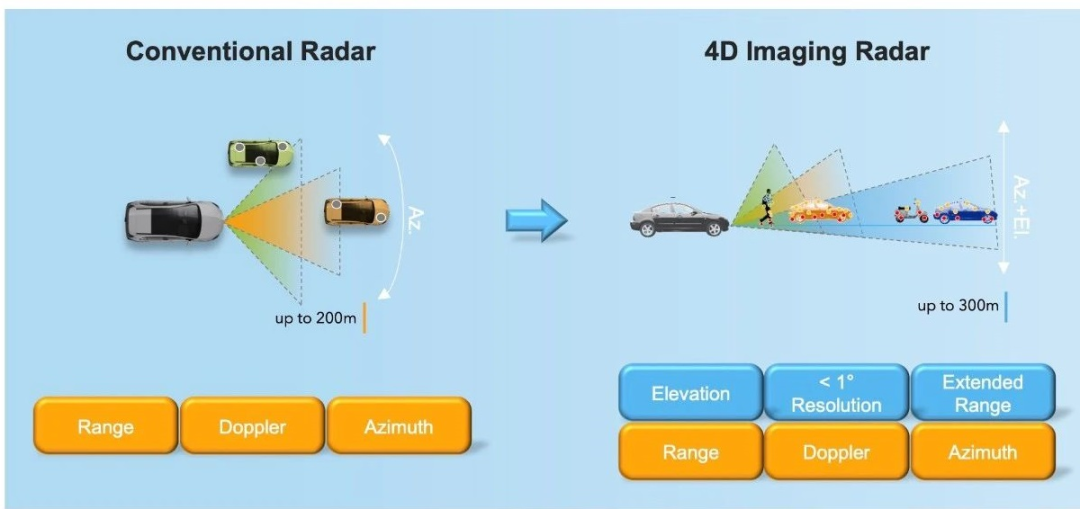
圖注:4D毫米波雷達(dá)與傳統(tǒng)雷達(dá)的區(qū)別(圖片來源:NXP)
在汽車應(yīng)用場景中,由于缺乏高度信息,傳統(tǒng)雷達(dá)在視角上只有一個(gè)平面,無法區(qū)分目標(biāo)物體是在“路上”還是在“空中”,這使得毫米波雷達(dá)無法有效發(fā)揮作用,尤其是在靜態(tài)物體識別方面。4D毫米波雷達(dá)可以捕捉汽車周圍目標(biāo)的空間坐標(biāo)和速度信息,還能計(jì)算目標(biāo)的俯仰角信息,進(jìn)而提供汽車周圍的環(huán)境信息,規(guī)劃出逼真的行駛路徑。為了實(shí)現(xiàn)這一技術(shù),通過增加實(shí)際或虛擬天線的數(shù)量,有效提高角分辨率,生成更多的點(diǎn)云(點(diǎn)云指的是某個(gè)坐標(biāo)系下所有點(diǎn)的數(shù)據(jù)集),并進(jìn)一步對目標(biāo)物體的基本輪廓和形狀進(jìn)行成像。此外,經(jīng)過深度學(xué)習(xí),4D毫米波雷達(dá)可以區(qū)分不同的目標(biāo),例如行人、自行車、汽車、卡車等。既然4D毫米波雷達(dá)具備上述優(yōu)勢,那么它是否可以取代激光雷達(dá)呢?取代激光雷達(dá)?激光雷達(dá)(LiDAR)或4D毫米波雷達(dá)能否成為智能駕駛汽車的主要傳感器,取決于具體場景,根據(jù)不同功能和需求開發(fā)不同的解決方案。
(1)從技術(shù)角度來看,4D毫米波雷達(dá)與激光雷達(dá)相比,不是一個(gè)數(shù)量級,前者無法取代遠(yuǎn)距離高性能激光雷達(dá)。
從點(diǎn)云應(yīng)用來看,4D毫米波雷達(dá)雖然也具備成像功能,但在點(diǎn)云密度和質(zhì)量方面仍無法與激光雷達(dá)的性能相提并論,難以滿足高水平自動(dòng)駕駛的感知需求。
在自動(dòng)駕駛場景中,對前向檢測精度的要求極高。當(dāng)汽車向前行駛時(shí),必須能夠準(zhǔn)確檢測和識別前方物體信息,包括大小、距離、方向和速度等,任何誤報(bào)或漏報(bào)都可能導(dǎo)致事故。LiDAR可以通過掃描周圍環(huán)境,形成3D圖像模型,并且可以在水平視場中每秒產(chǎn)生數(shù)百萬個(gè)點(diǎn)云,其點(diǎn)云密度足以滿足不同級別自動(dòng)駕駛的感知需求。
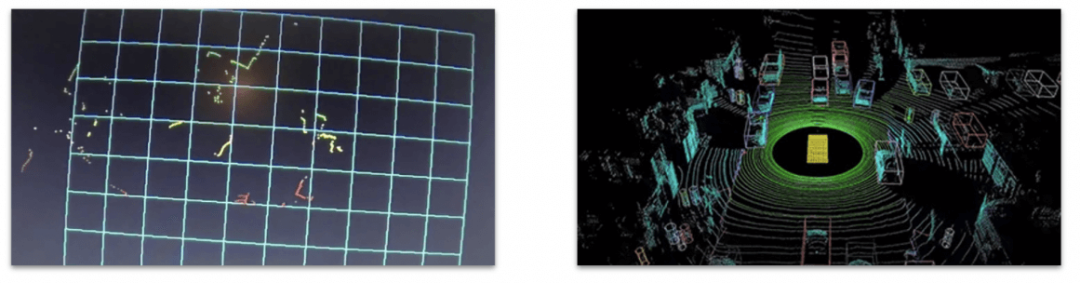
圖注:點(diǎn)云數(shù)據(jù)被用于成像,反映汽車周圍的環(huán)境(圖片來源:thinkautonomous.ai)
(2)從成本角度來看,此前有一種觀點(diǎn)認(rèn)為,4D毫米波雷達(dá)未來可能會(huì)取代low-beam激光雷達(dá),主要是成本驅(qū)動(dòng),但是在價(jià)格方面,一些4D毫米波雷達(dá)的價(jià)格并不比Flash LiDAR便宜,而且,單片4D毫米波雷達(dá)仍處于早期市場拓展階段。
(3)而且,建立一個(gè)標(biāo)準(zhǔn)化、量產(chǎn)化的產(chǎn)品可能需要3年甚至更長時(shí)間。4D毫米波雷達(dá)比較有可能取代的應(yīng)該是傳統(tǒng)毫米波雷達(dá),而不是激光雷達(dá)。預(yù)計(jì)4D毫米波雷達(dá)將首先以側(cè)雷達(dá)的形式搭載到汽車上。
無論怎樣,4D毫米波雷達(dá)具有潛力,根據(jù)IEEE資料,4D毫米波雷達(dá)在自動(dòng)駕駛(AD)系統(tǒng)中顯示出作為獨(dú)立或輔助傳感器的巨大潛力,提高動(dòng)態(tài)交通環(huán)境下的感知準(zhǔn)確性,因?yàn)樗邆洹霸跇O端環(huán)境中的魯棒性以及出色的速度和遠(yuǎn)程測量能力”。該項(xiàng)研究同時(shí)表明,4D毫米波雷達(dá)除了需要在點(diǎn)云方面增強(qiáng),還需要在算法、實(shí)時(shí)性能、數(shù)據(jù)集等方面進(jìn)行提升。
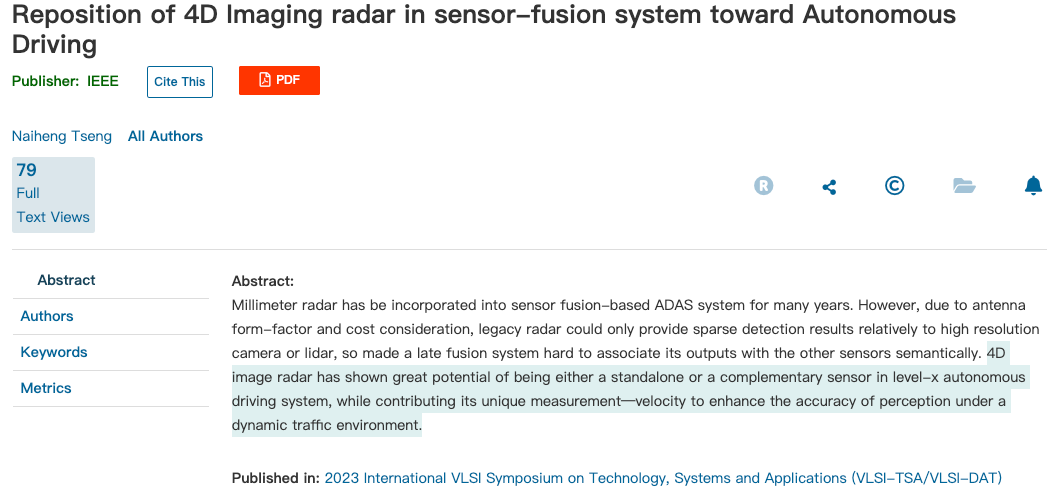
圖注:研究表明,4D毫米波雷達(dá)在自動(dòng)駕駛(AD)系統(tǒng)中可提高動(dòng)態(tài)交通環(huán)境下的感知準(zhǔn)確性(來源:IEEE)
對于自動(dòng)駕駛來說,沒有任何一種傳感器是完美的,只有同時(shí)使用多種傳感器,才能獲得自動(dòng)駕駛所需的精度和準(zhǔn)確度,因此,傳感器融合(fusion)或者傳感器套件(suit)更為常見。那么,什么樣的傳感器配置符合當(dāng)前L2或者L2+級別自動(dòng)駕駛的需求?
“圖像傳感器+4D毫米波雷達(dá)”組合或?qū)⒏悠毡?/strong>多數(shù)汽車OEM廠商在其ADAS/AD傳感器套件中,將4D毫米波雷達(dá)與圖像傳感器、LiDAR和其他雷達(dá)一起使用。機(jī)構(gòu)Frost & Sullivan預(yù)計(jì),“圖像傳感器+4D毫米波雷達(dá)”的組合可能會(huì)在大眾市場的汽車中變得普遍;昂貴的LiDAR傳感器被用于高檔汽車以及具有L3和更高自動(dòng)駕駛能力的汽車。在2025年之后,當(dāng)LiDAR成本降低,才有可能與4D毫米波雷達(dá)在大眾市場形成競爭。
配備L2/L2+自動(dòng)駕駛功能的汽車越來越受歡迎,并需要具有成本效益的傳感器提供足夠準(zhǔn)確的點(diǎn)云數(shù)據(jù),將誤報(bào)率降至最低,4D毫米波雷達(dá)將在這一領(lǐng)域表現(xiàn)出色。體現(xiàn)在性價(jià)比、可擴(kuò)展性,及其技術(shù)進(jìn)步的提高。目前4D毫米波雷達(dá)擁有從多個(gè)芯片組和傳感器,到兼具短程、中程和長距離檢測能力的單芯片解決方案,這將提高其采用率,并有可能降低ADAS傳感器套件成本。
Frost&Sullivan預(yù)測,到2030年,北美和歐洲的乘用車成像雷達(dá)市場將達(dá)到約370萬臺。從用于L3的1到2個(gè)遠(yuǎn)程和短程成像雷達(dá),發(fā)展到L4和L5汽車的多達(dá)5個(gè),成像雷達(dá)可以取代傳統(tǒng)的短程雷達(dá)(SRR)和遠(yuǎn)程雷達(dá)(LRR)。
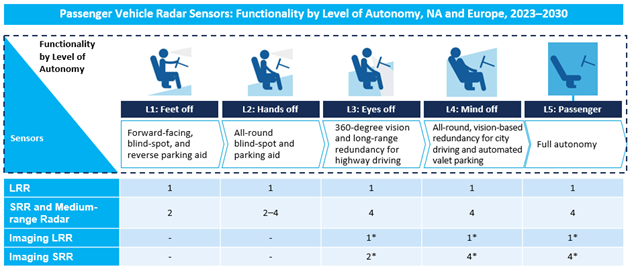
圖注:2023-2030年不同級別自動(dòng)駕駛使用的毫米波雷達(dá)數(shù)量(圖片來源:Frost & Sullivan)
雷達(dá)傳感器的主要廠商和產(chǎn)品1、NXP:提供完整的雷達(dá)傳感器解決方案今年5月,NXP宣布蔚來汽車將部署其雷達(dá)技術(shù),包括其4D毫米波雷達(dá)解決方案。NXP提供完整的雷達(dá)傳感器解決方案,可實(shí)現(xiàn)汽車周邊360度感知。可擴(kuò)展的傳感解決方案套件涵蓋汽車制造商日益多樣化的用例和架構(gòu),從角雷達(dá)到高分辨率4D毫米波雷達(dá)。
NXP S32R系列提供安全可靠的雷達(dá)處理能力,產(chǎn)品組合適用于角雷達(dá)、前雷達(dá)和4D成像雷達(dá)等用例。NXP提供4D成像雷達(dá)開發(fā)板包括4個(gè)TEF8232雷達(dá)MMIC芯片,分別可以接出12根發(fā)射天線和16根接收天線,信號在完成發(fā)射、接收、混頻和采樣后,通過MIPI CSI接口傳輸?shù)絊32R45雷達(dá)MCU上進(jìn)行處理,實(shí)現(xiàn)一個(gè)完整的4D成像雷達(dá)檢測解決方案。
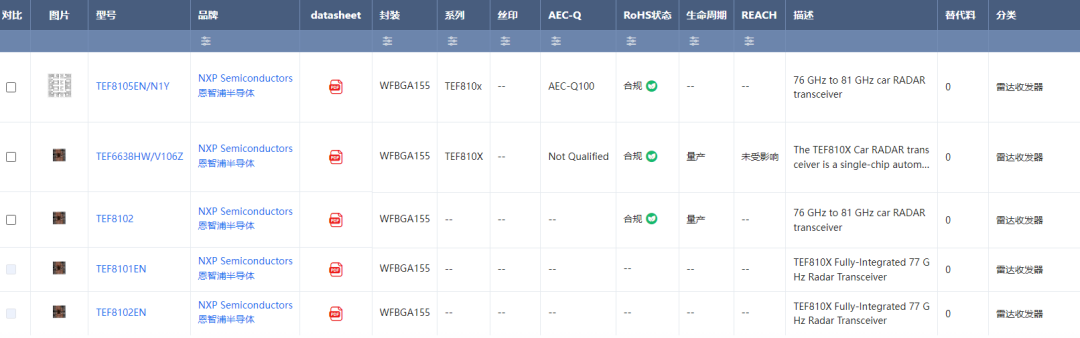
圖注:NXP雷達(dá)收發(fā)器(圖片來源:芯查查SaaS)
2、瑞薩電子:兼具4D毫米波雷達(dá)、ADAS SoC等簡化雷達(dá)系統(tǒng)設(shè)計(jì)
瑞薩電子去年10月收購的Steradian是一家提供4D毫米波成像雷達(dá)解決方案的fabless公司。瑞薩電子計(jì)劃依托汽車?yán)走_(dá)市場提供的高增長機(jī)遇,借助Steradian的雷達(dá)技術(shù)擴(kuò)展其汽車產(chǎn)品組合,并擴(kuò)大其在雷達(dá)市場的影響力。由此產(chǎn)生的汽車?yán)走_(dá)解決方案將結(jié)合新的汽車?yán)走_(dá)產(chǎn)品、瑞薩電子用于處理雷達(dá)信號的ADAS SoC(片上系統(tǒng))、電源管理IC(PMIC)和計(jì)時(shí)產(chǎn)品以及用于物體識別的軟件,這些解決方案將簡化汽車?yán)走_(dá)系統(tǒng)設(shè)計(jì),并有助于加快產(chǎn)品開發(fā)。產(chǎn)品方面,瑞薩電子SRIR256-V2是一種實(shí)時(shí)4D成像雷達(dá)系統(tǒng),基于SVR4414高性能CMOS雷達(dá)收發(fā)器IC。SRIR256-V2通過級聯(lián)4個(gè)SVR4414收發(fā)器,每個(gè)收發(fā)器具有4個(gè)獨(dú)立的發(fā)送通道和4個(gè)獨(dú)立的接收通道,采用多輸入多輸出配置(MIMO),實(shí)現(xiàn)了一流的空間分辨率。這種16個(gè)發(fā)射和16個(gè)接收器組合的布置產(chǎn)生了256個(gè)虛擬通道,用于對前方的水平和垂直空間進(jìn)行采樣。LRR模式的SRIR256-V2可以將多個(gè)獨(dú)立的發(fā)射通道同相組合,最大限度地?cái)U(kuò)大范圍,這有助于在遠(yuǎn)距離應(yīng)用中檢測250米以外的目標(biāo)。
3、經(jīng)緯恒潤:4D毫米波雷達(dá)2024年量產(chǎn)
經(jīng)緯恒潤在研項(xiàng)目包含4D毫米波雷達(dá),圍繞下一代多片級聯(lián)高性能毫米波雷達(dá)架構(gòu),融合MIMO陣列信號處理、雷達(dá)鏈路自校準(zhǔn)、基于深度學(xué)習(xí)的目標(biāo)識別等新技術(shù),開發(fā)4D毫米波雷達(dá),為實(shí)現(xiàn)L3平臺毫米波雷達(dá)傳感器奠定基礎(chǔ)。預(yù)計(jì)經(jīng)緯恒潤的4D毫米波雷達(dá)將在2024年達(dá)到量產(chǎn)狀態(tài)。其研發(fā)的高性能4D毫米波雷達(dá)產(chǎn)品采用Arbe的方案,適合于使用4D毫米波雷達(dá)替代16線激光雷達(dá),或降低對激光雷達(dá)數(shù)量要求的客戶。經(jīng)緯恒潤表示,部分客戶可能只是想要彌補(bǔ)視覺方案的缺陷,這種情況下客戶對于4D毫米波雷達(dá)的要求會(huì)相對較低一些,因此經(jīng)緯恒潤考慮研發(fā)完成48發(fā)48收、24發(fā)12收的毫米波雷達(dá)之后,再去研發(fā)相對低性能的版本。小 結(jié)目前自動(dòng)駕駛從L2/L2+向L3演進(jìn),4D毫米波雷達(dá)在這個(gè)過程中具有重要的應(yīng)用價(jià)值。隨著進(jìn)一步優(yōu)化算法、降低成本以及與其它傳感器進(jìn)行深度融合等方面的努力,其技術(shù)優(yōu)勢將得到充分發(fā)揮。本文講述了4D毫米波雷達(dá)在自動(dòng)駕駛中的潛力,表明其在當(dāng)前主流L2/L2+自動(dòng)駕駛的傳感器融合中的作用日益突顯,隨著供應(yīng)商的產(chǎn)品組合增強(qiáng),汽車OEM對該項(xiàng)技術(shù)的采納,技術(shù)格局有可能改變。
-
傳感器
+關(guān)注
關(guān)注
2541文章
49963瀏覽量
747562 -
毫米波
+關(guān)注
關(guān)注
21文章
1892瀏覽量
64483 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
105文章
1011瀏覽量
63992
發(fā)布評論請先 登錄
相關(guān)推薦
什么是毫米波雷達(dá)?毫米波雷達(dá)模組選型

正和微芯發(fā)布4D毫米波雷達(dá)SoC芯片RS6240
簡述毫米波雷達(dá)的結(jié)構(gòu)、原理和特點(diǎn)
加特蘭毫米波雷達(dá)SoC家族再進(jìn)化,為全球市場提供高性能雷達(dá)解決方案

基于毫米波雷達(dá)的手勢識別算法
4D毫米波雷達(dá)的拆解報(bào)告分享
睿藍(lán)7獵光Max車型交付啟動(dòng),搭載12個(gè)超聲波雷達(dá)及5個(gè)4D毫米波雷達(dá)
毫米波雷達(dá)的作用 毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
經(jīng)緯恒潤4D成像毫米波雷達(dá)亮相 CES 2024

4D毫米波成像雷達(dá)的測試要求都有哪些嗯?

中央域控雷達(dá):4D雷達(dá)新時(shí)代

行易道發(fā)布4D毫米波成像多雷達(dá)實(shí)時(shí)環(huán)視SLAM系統(tǒng)
毫米波雷達(dá)的優(yōu)缺點(diǎn)
透波低介電絕緣高導(dǎo)熱氮化硼膜材墊片毫米波雷達(dá)的應(yīng)用

本周納瓦電子4D毫米波雷達(dá)收到主機(jī)廠定點(diǎn)函!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論