 N32L40XCL-STB開發板模塊評測之CAN測試案例
N32L40XCL-STB開發板模塊評測之CAN測試案例
模塊介紹
CAN 是控制器局域網絡(Controller Area Network)的簡稱,它是由研發和生產汽車電子產品著稱的德國博世(BOSCH)公司開發的,并最終成為國際標準, CAN 總線協議已經成為汽車計算機控制系統和嵌入式工業控制局域網的標準總線。
近年來,它具有的高可靠性和良好的錯誤檢測能力受到重視,被廣泛應用于汽車計算機控制系統和環境溫度惡劣、電磁輻射強及振動大的工業環境。
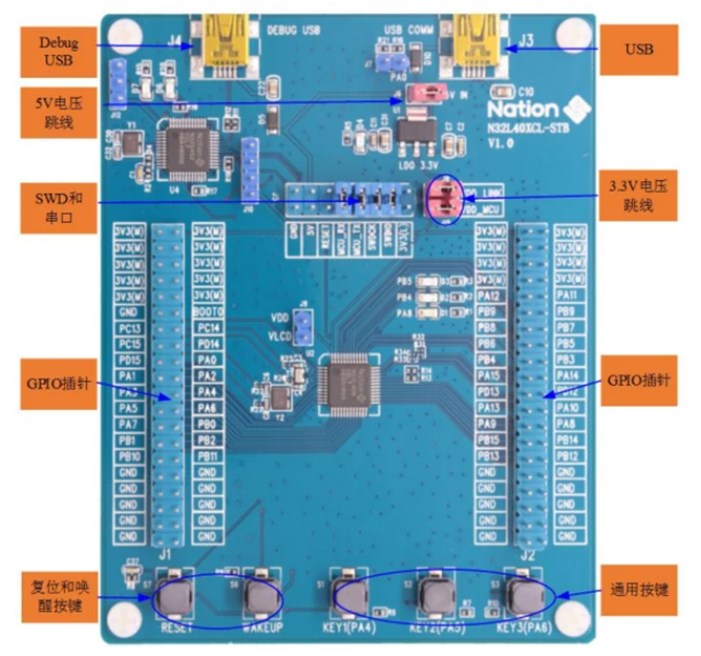
國民技術的N32L40XCL芯片系列擁有1個CAN 2.0A/B總線接口,本次實驗使用N32L40XCL-STB開發板平臺進行評測CAN總線使用。
開發環境搭建
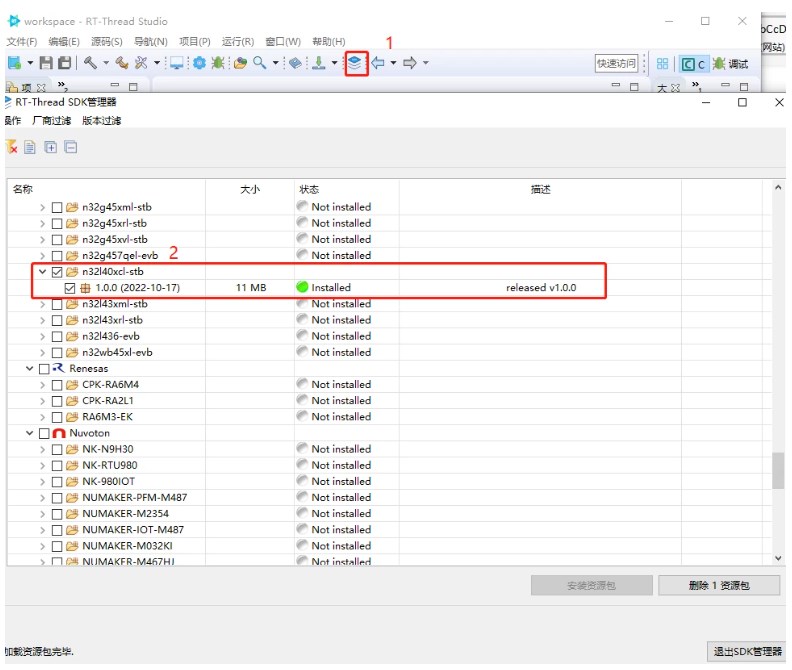
1、打開RT-Thread Studio在工具欄選擇SDK Manage圖標,下拉選擇安裝N32L40XCL-STB
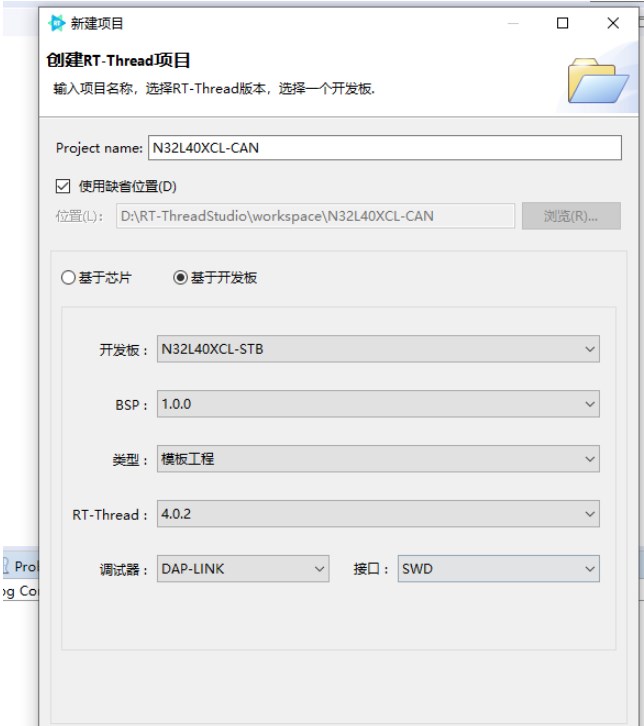
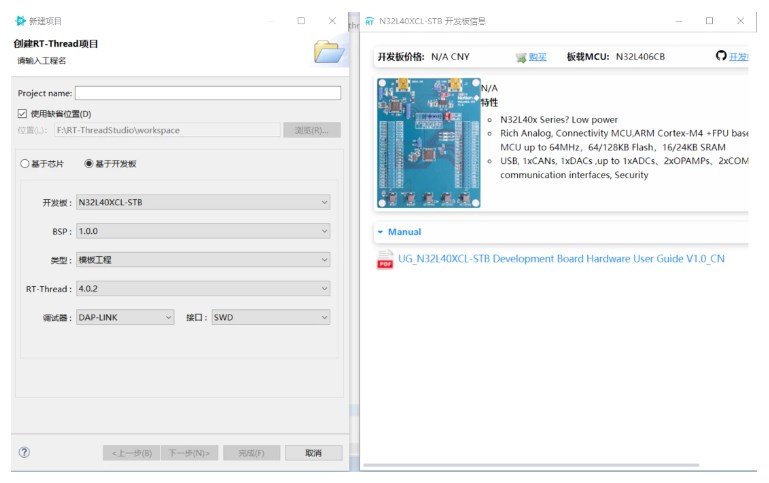
2、確認安裝完畢支持包后返回首頁,開始創建測試項目:文件->創建RT-Thread項目

3、在創建項目里面填寫配置工程名稱為:N32L40XCL-CAN。創建完成后,可以看到工程目錄applications文件夾下的main.c已經幫我們創建
循環點亮LED PB5

4、創建CAN測試程序
首先我們在工程的RT-Thread Settings配置打開CAN外設

最后在applications文件夾下創建app_can.c文件

初始化can名稱為”bxcan”,默認的名稱可以在 drv_can.c文件里面找到

最后我們調用自動初始化接口初始化CAN測試程序INIT_APP_EXPORT(app_acn_init);
代碼驗證
編譯成功后燒錄到開發板,由于本人的CAN邏輯分析儀快遞沒有到,所以這里使用了邏輯分析儀查看CAN芯片發送的數據。可以看到是正確的。
初始化時候發送數據:

邏輯分析儀觀察可以看到接收的數據是一致的

總結
本次評測國民技術的N32L40XCL-STB開發板中,使用RT-Thread Studio軟件開發。工作量很少,基本不用編寫太多代碼,其他的驅動都寫好。自己盡管調用即可。N32L40XCL的CAN總線非常不錯,使用方便,評測通過收發數據。后續做產品可以切入使用。
-
控制器
+關注
關注
112文章
16203瀏覽量
177401 -
CAN總線
+關注
關注
145文章
1936瀏覽量
130629 -
邏輯分析儀
+關注
關注
3文章
214瀏覽量
23136 -
RT-Thread
+關注
關注
31文章
1272瀏覽量
39920
發布評論請先 登錄
相關推薦
N32L43XCL-STB開發板硬件使用手冊
N32L40XCL-STB開發板硬件使用手冊

N32L40XCL-STB 開發板模塊評測任務大挑戰
N32L40XCL-STB開發板模塊評測任務大挑戰之UART
N32L40XCL-STB開發板模塊評測任務大挑戰-測試CAN





 工商網監
工商網監
評論