 足端復合擺線軌跡介紹
足端復合擺線軌跡介紹
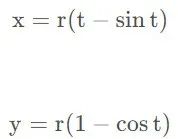
一、擺線
擺線,又稱旋輪線、圓滾線,在數學中,擺線(Cycloid)被定義為,一個圓沿一條直線運動時,圓邊界上一定點所形成的軌跡。它是一般旋輪線的一種。
總結成數學公式為:
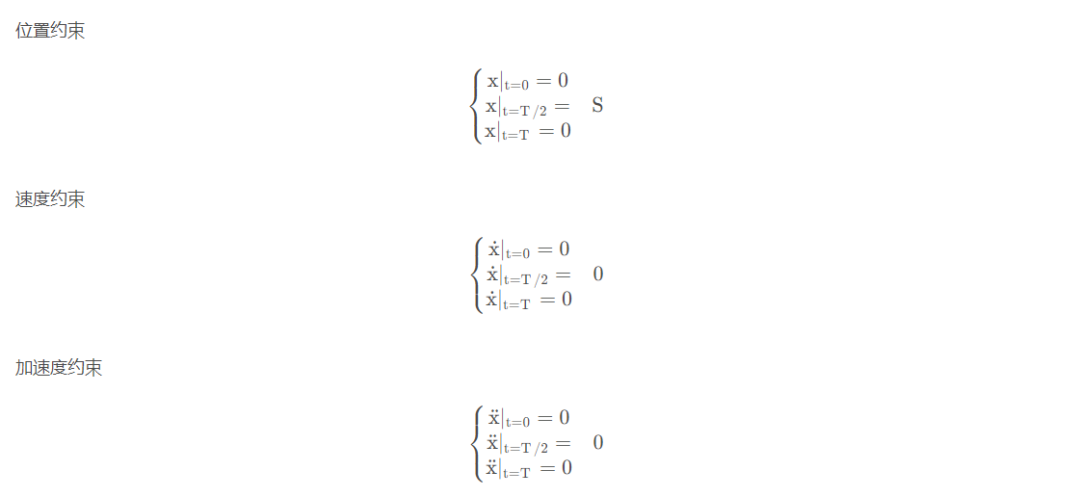
二、足端軌跡約束方程
為達到理想的步態,足端軌跡規劃需要滿足:
① 行進平穩、協調,無明顯的上下波動、左右搖晃和前后沖擊;
② 各關節沒有較大沖擊,特別是擺動相抬腿和落地瞬間實現零沖擊抬腿和落地軟著陸;
③ 擺動腿跨步迅速,足端軌跡圓滑,關節速度和加速度平滑連續無畸點;
④ 避免足端與地面接觸時產生滑動,無擺動腿拖地現象。

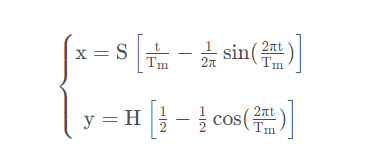
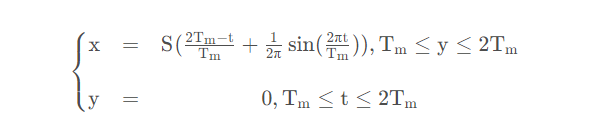
1、水平x方向
2、豎直y方向

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28205瀏覽量
206534 -
運動控制
+關注
關注
4文章
565瀏覽量
32825
發布評論請先 登錄
相關推薦
擺線減速機的工作原理是什么?
擺線針輪減速機全部傳動裝置可分為三部分:輸入部分、減速部分、輸出部分。在輸入軸上裝有一個錯位180°的雙偏心套,在偏心套上裝有兩個稱為轉臂的滾柱軸承,形成H機構、兩個擺線輪的中心孔即為偏心套上轉臂
發表于 09-20 09:11
分解式虛擬模型步態算法VMC介紹
軌跡控制機器人足端曲線使用貝賽爾曲線等軌跡設定,控制方法簡單,但是很難適應多變的地形。分解式虛擬模型步態算法VMC介紹VMC 控制方法是利用
發表于 09-15 06:23
分享大神的畢業設計-履帶四足復合機器人
WiFi通信配置6.2 運動控制內容:單腿正解FK單腿逆解IK姿態逆解足端擺線軌跡計算Trot步態模式Walk步態模式*VMC算法 -- 偽閉環(待測試)6.3 代碼文件說明:lib
發表于 06-09 11:37
繪制根軌跡的MATLAB函數介紹
繪制根軌跡的MATLAB函數介紹
4.4.1 rlocus
⒈.功能:繪制系統的根軌跡。
⒉.格式:
[r,k]=rlocus(
發表于 07-27 14:22
?7114次閱讀
擺線針輪減速機原理圖、結構圖、性能及型號表示方法
擺線針輪減速機原理圖、結構圖、性能及型號表示方法
擺線針輪減速機原理/擺線減速機結構原理行星擺線針輪減速機全部傳動裝置可分為三部分
發表于 09-12 17:37
?3.8w次閱讀
仿生四足機器人設計及運動學足端受力分析
仿生四足機器人腿部結構設計與生物腿部實際結構存在差異,足端與地面的剛性接觸力對于控制其運動平穩和收斂會產生不利影響。為解決上述問題,分析德國牧羊犬骨骼結構,通過圖像處理和分析手段獲取牧羊犬對角小跑步
發表于 02-08 16:07
?2次下載
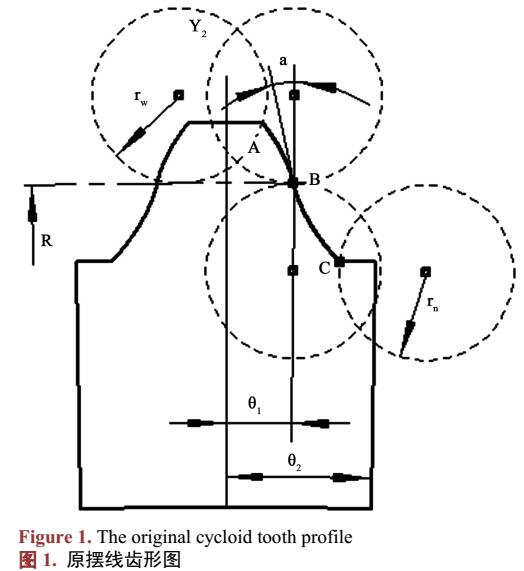
擺線齒形諧波齒輪傳動設計
諧波齒輪傳動具有體積小,重量輕,傳動比大,精度高,承載能力強等諸多優點,被應用到航空航天、機器人等眾多高精尖領域。 本研究綜合考慮諧波傳動齒形對其嚙合特性的影響,以公切線式新擺線齒形作為研究對象
發表于 04-13 14:06
?1次下載
雙足行走機器人步行原理是什么?步態軌跡規劃的詳細分析資料概述
通過對雙足機器人行走過程中一些特殊點進行采樣分析,對比人類自身行走步態的觀察測量值,采用三次多項式插值來計算出雙足行走機器人在行走過程中的行走軌跡,按人體比例設定參數,計算得出了1條比較光滑平穩
發表于 08-13 08:00
?102次下載
功率放大器在復合超聲電機正反向運動中的應用
形疊加而成)驅動彎彎復合超聲電機,測試其驅動足的運動軌跡和樣機基本輸出特性。實驗過程:01測試驅動足軌跡;用函數信號放大器產生信號,經過功放

機器人擺動相軌跡設計
1、擺動相軌跡設計 基于第二節中提到的原則,文獻[1]中提出了一種基于復合擺線形式的軌跡規劃方法,并在文獻[2]中得到了驗證和使用。 針對機器人足底與地面接觸時會產生滑動和行走過程中拖
擺線針輪行星減速器的工作原理
擺線針輪行星減速器是一種廣泛應用于工業機械傳動系統中的減速裝置。它由內部的軸承箱和外部的行星輪組成,通過行星輪的相對運動實現輸入軸與輸出軸之間的減速傳動。下面將詳細介紹擺線針輪行星減速器的工作原理





 工商網監
工商網監
評論