1、擺動(dòng)相軌跡設(shè)計(jì)
基于第二節(jié)中提到的原則,文獻(xiàn)[1]中提出了一種基于復(fù)合擺線形式的軌跡規(guī)劃方法,并在文獻(xiàn)[2]中得到了驗(yàn)證和使用。
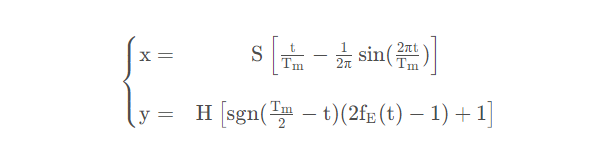
針對(duì)機(jī)器人足底與地面接觸時(shí)會(huì)產(chǎn)生滑動(dòng)和行走過(guò)程中拖地問題,文獻(xiàn)[2]對(duì)復(fù)合擺線規(guī)劃方法提出了修改,修改后的擺動(dòng)腿的步態(tài)規(guī)劃軌跡定義為:
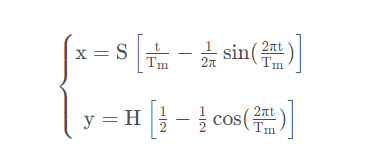
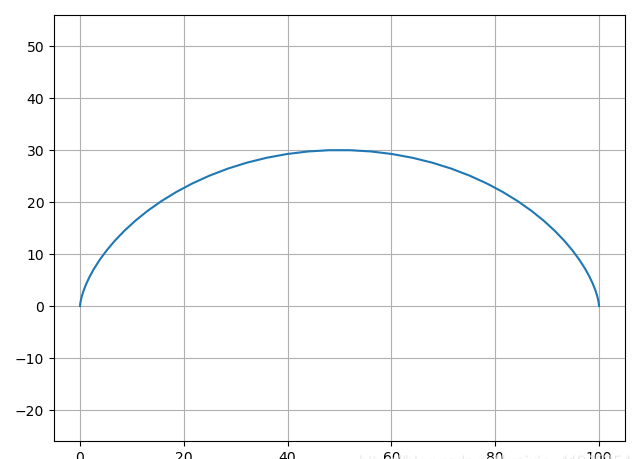
其中S為步幅, H為抬腿高度,T m 為擺動(dòng)相周期現(xiàn)在我們來(lái)看提下它的圖像,設(shè)定S = 100, H = 30, 周期T=2。
我們用python繪制該軌跡的圖像如下:
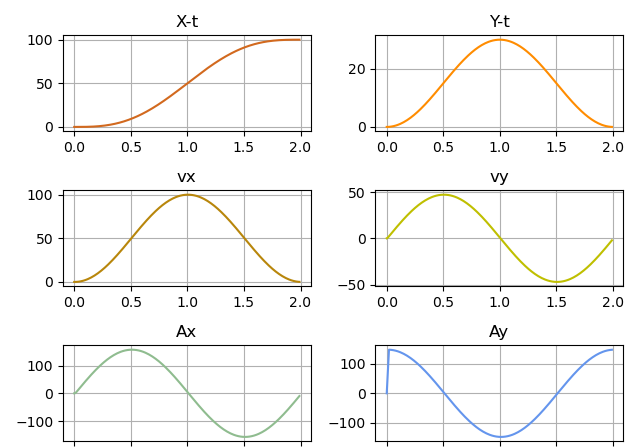
為了更好地研究該軌跡的特性,我們接下來(lái)依次看x,y關(guān)于時(shí)間的位置,速度,加速度
2、軌跡改進(jìn)
從表達(dá)式上分析,該軌跡的加速度方程是余弦函數(shù)的倍數(shù),在 t=0 和 t=Tm時(shí)刻會(huì)出現(xiàn)加速度跳變,根據(jù)F = M a
,這就導(dǎo)致了抬腿的瞬間要求產(chǎn)生較大的接觸力。
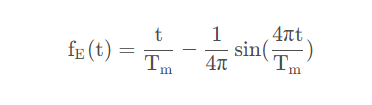
從加速度圖像亦能說(shuō)明這一點(diǎn)。針對(duì)這一問題,文獻(xiàn)[5]對(duì) y 方向的位移方程提出了以下修改。
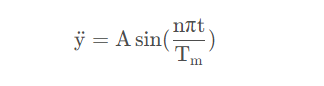
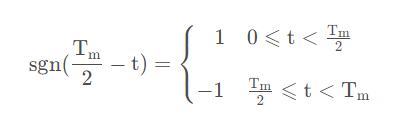
由于擺動(dòng)腿在 y 軸運(yùn)動(dòng)需要先抬腿再落腿,借鑒 x 軸正弦方式運(yùn)動(dòng)的方法求解 y 軸位移曲線
先從加速度函數(shù)入手,我們?cè)O(shè)計(jì)成如下形式:
對(duì)上式進(jìn)行積分求得速度函數(shù):

對(duì)速度函數(shù)進(jìn)行積分,求得位移函數(shù)為:

為了確定n的取值,我們來(lái)看看n取不同值時(shí)的速度圖像,取T = 2 , H = 1 , S = 1
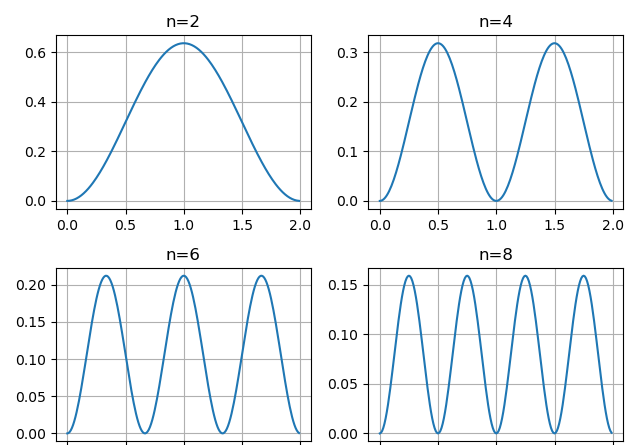
可以看出,當(dāng)n越大時(shí),y方向上的速度變化就越頻繁,這可能會(huì)導(dǎo)致系統(tǒng)能耗的增加。
再來(lái)看位移圖像:
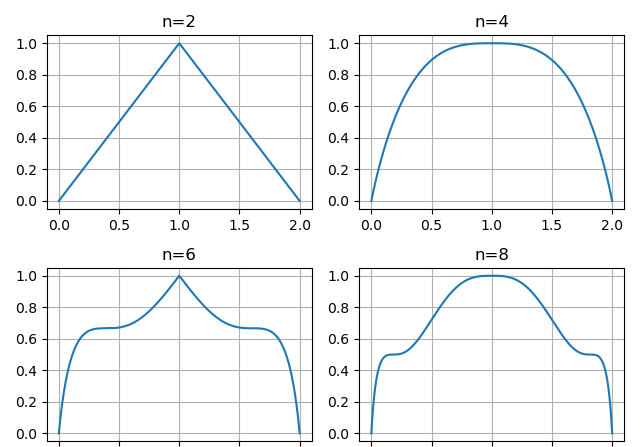
從位移圖像來(lái)看,只有當(dāng)n取4時(shí),軌跡才是平滑的。因此我們可以確定軌跡的最終形式為:
其中
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
相關(guān)推薦
現(xiàn)在做畢業(yè)設(shè)計(jì),是基于labview的挖掘機(jī)器人軌跡規(guī)劃與控制,就是用labview來(lái)實(shí)現(xiàn)軌跡規(guī)劃的編程,請(qǐng)教各位,這容易實(shí)現(xiàn)嗎?該從哪入手啊?謝謝了!
發(fā)表于 04-01 14:32
` 本帖最后由 大連云港 于 2015-1-19 11:02 編輯
工業(yè)機(jī)器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器人。工業(yè)機(jī)器人是自動(dòng)執(zhí)行工作的機(jī)器裝置,是靠自身動(dòng)力和控
發(fā)表于 01-19 10:58
目前產(chǎn)業(yè)機(jī)器人僅能在嚴(yán)格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動(dòng)作,缺乏對(duì)環(huán)境的感知與應(yīng)變能力,這極大地限制了機(jī)器人的應(yīng)用。利用機(jī)器人的視覺控制,不需要預(yù)先對(duì)產(chǎn)業(yè)機(jī)器人的運(yùn)動(dòng)
發(fā)表于 01-23 15:02
本菜鳥剛學(xué)機(jī)器人控制,對(duì)于兩關(guān)節(jié)機(jī)器人,實(shí)現(xiàn)既定的末端軌跡,軌跡規(guī)劃已完成,但是程序的延時(shí)不準(zhǔn)確,導(dǎo)致最終軌跡混亂,求大神破?
發(fā)表于 04-29 16:21
具體而言,工業(yè)機(jī)器人的控制可以分成笛卡爾空間的軌跡規(guī)劃和關(guān)節(jié)空間的軌跡規(guī)劃。笛卡爾空間的軌跡規(guī)劃是以機(jī)器人末端執(zhí)行器在笛卡爾空間運(yùn)動(dòng)時(shí)的位姿
發(fā)表于 07-12 13:26
成反比,因此,焊接電流的變化可以反映擺動(dòng)中心與坡口中心的偏移,如圖 5 所示。若實(shí)際焊縫位置未偏離示教軌跡,則焊槍擺動(dòng)到左右極限位置時(shí)的焊接電流相同,無(wú)需修正機(jī)器人示教
發(fā)表于 03-13 09:15
列舉部分學(xué)習(xí)過(guò)程中接觸的部分書籍,部分有中文版,部分有更新版本。1.機(jī)器人基礎(chǔ)書籍適合入門的書籍:機(jī)器人學(xué)機(jī)器人建模規(guī)劃與控制機(jī)器人學(xué)、機(jī)器
發(fā)表于 05-22 06:53
機(jī)器人的移動(dòng)通常是從管理機(jī)器人總體任務(wù)進(jìn)度的中央處理器發(fā)出位置變化請(qǐng)求時(shí)開始的。導(dǎo)航系統(tǒng)通過(guò)制定行程計(jì)劃或軌跡以開始執(zhí)行位置變化請(qǐng)求。行程計(jì)劃需考慮可用路徑、已知障礙位置、機(jī)器人能力及
發(fā)表于 09-10 10:44
差速移動(dòng)機(jī)器人軌跡跟蹤控制方法一、引言二·、基礎(chǔ)準(zhǔn)備1.去除GPS數(shù)據(jù)中的壞點(diǎn)2.經(jīng)緯度與平面坐標(biāo)系轉(zhuǎn)換3.差速移動(dòng)機(jī)器人數(shù)學(xué)建模三、基于PID的差分移動(dòng)機(jī)器人
發(fā)表于 09-01 08:41
差速機(jī)器人的純軌跡跟蹤仿真(Matlab)剛?cè)腴T,有的地方不對(duì),煩請(qǐng)大家指正。目錄差速機(jī)器人的純軌跡跟蹤仿真(Matlab)1 差速機(jī)器人運(yùn)
發(fā)表于 09-01 08:11
軌跡機(jī)器人教案: 本節(jié)課是知識(shí)縲旋性上升中的綜合性知識(shí)的一部分,在前的幾節(jié)課中我們學(xué)習(xí)了關(guān)于機(jī)器人主機(jī)、傳感器,并用實(shí)驗(yàn)完成了機(jī)器人走迷宮的項(xiàng)目任務(wù),在此基礎(chǔ)為
發(fā)表于 08-02 08:22
?0次下載
手部或關(guān)節(jié)的某個(gè)規(guī)定的運(yùn)動(dòng)等。 機(jī)器人的規(guī)劃是分層次的,從高層的任務(wù)規(guī)劃,動(dòng)作規(guī)劃到手部軌跡規(guī)劃和關(guān)節(jié)軌跡規(guī)劃,最后才是底層的控制(見圖)。在上述例子中,我們沒有討論力的問題,實(shí)際上,對(duì)有些機(jī)
發(fā)表于 10-13 14:44
?6次下載

軟件,繪制出了機(jī)器人運(yùn)動(dòng)關(guān)節(jié)軌跡函數(shù)的速度一轉(zhuǎn)矩曲線。其次,參考伺服電機(jī)速度一轉(zhuǎn)矩特性曲線,分析了關(guān)節(jié)最大轉(zhuǎn)矩與電機(jī)轉(zhuǎn)矩之間的相互影響。最后,提出了一種基于電機(jī)轉(zhuǎn)矩曲線下優(yōu)化軌跡函數(shù)的簡(jiǎn)單方法,推導(dǎo)出了
發(fā)表于 03-14 11:24
?0次下載
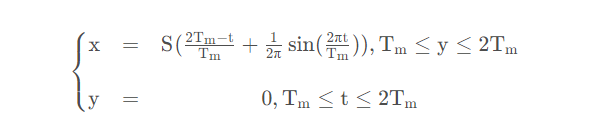
支撐相足端軌跡 相比于擺動(dòng)相的足端軌跡,支撐相的設(shè)計(jì)就顯得稍微簡(jiǎn)單。首先我們要知道兩點(diǎn): 支撐
![的頭像]() 發(fā)表于
發(fā)表于 11-22 11:48
?362次閱讀
??自動(dòng)化技術(shù)的不斷進(jìn)步,焊接機(jī)器人是提高生產(chǎn)效率和焊接質(zhì)量的重要工具。而焊接機(jī)器人拖拽軌跡的設(shè)置則是確保焊接精準(zhǔn)性和一致性的重要環(huán)節(jié)。今天跟隨創(chuàng)想智控焊縫跟蹤系統(tǒng)小編一起了解焊接機(jī)器人
![的頭像]() 發(fā)表于
發(fā)表于 09-11 17:10
?296次閱讀

") 機(jī)器人擺動(dòng)相軌跡設(shè)計(jì)
機(jī)器人擺動(dòng)相軌跡設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論