 機器人支撐相足端軌跡
機器人支撐相足端軌跡
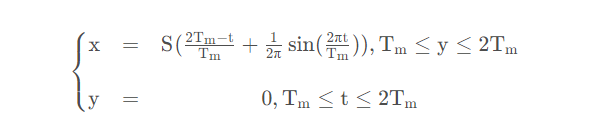
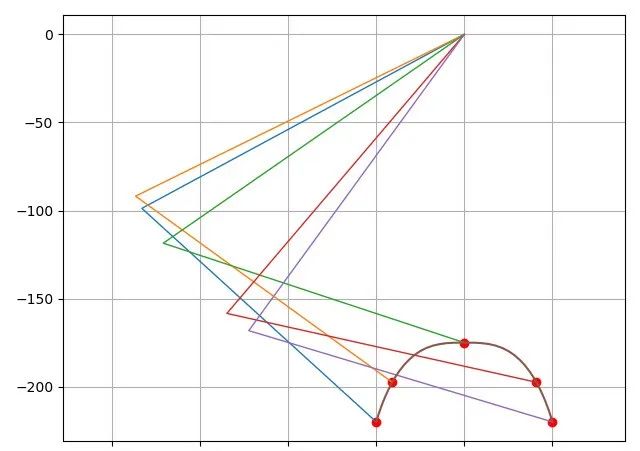
支撐相足端軌跡
相比于擺動相的足端軌跡,支撐相的設計就顯得稍微簡單。首先我們要知道兩點:
支撐相水平方向上的位移曲線與擺動相的關于t = T m 對稱。
豎直方向的位移適終為0,基于這兩點,我們可以設計出如下曲線:
周期軌跡
定義步態周期為T TT,支撐相,擺動相周期均為T m ,則T = 2 T m
我們對時間進行周期化處理:
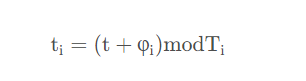
其中,t 為系統時間,t i為第i條腿的軌跡規劃時間,以LF腿的相位為初始值,則φ i為各腿相位落后于LF腿的時間與步態周期的比值。

四、總結
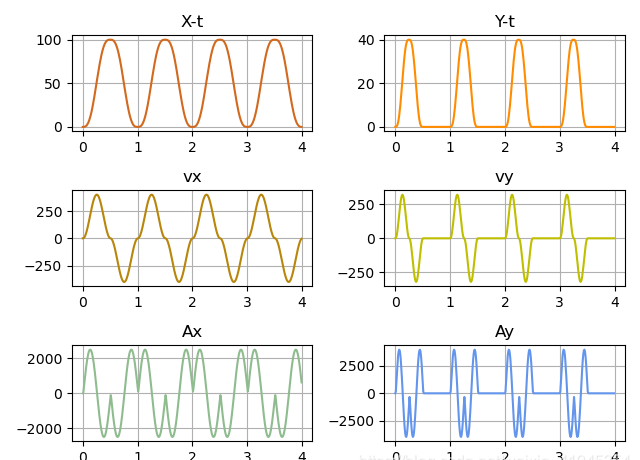
通過對軌跡方程的改進及其圖像的分析,我們最終得到了一個平滑,且沖擊較小的復合擺線軌跡
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28207瀏覽量
206538 -
軌跡
+關注
關注
0文章
46瀏覽量
9263
發布評論請先 登錄
相關推薦
stm32紅外六足機器人
六足爬行機器人畢業時的作品,當時還處于入門狀態,c程序寫的比較菜(程序寫的比較亂,僅作參考),一直想把這個六足機器人作品優化一下,可惜,一直在忙,現借助電路城這個平臺開源給大家,希望大
發表于 03-27 18:51
【Embedded Pi申請】六足機器人的創新研發
申請理由:關于六足機器人,基本上是用18個舵機一起使用來驅動六足完成相應的動作組,而一般的89C52以及STC12系列的單片機只能讓六足機器人
發表于 11-25 15:35
什么是龍人四足機器人?
龍人四足機器人是一種仿生機器人,由Openduino控制板控制,有四條腿,每條腿兩個自由度,由兩個舵機驅動,能實現兩種步態行走。配有三個超聲波,實現大角度智能避障。標準演示程序有5個可
發表于 03-24 16:17
ColorSky雙足機器人開源項目
本帖最后由 colorsky 于 2016-4-21 14:05 編輯
大家好,我是ColorSky。這是我的雙足機器人的開源項目。先發出視頻給大家看看,后面陸續會把技術資料上傳。機器人鞠躬動作
發表于 04-21 10:51
四足仿生機器人
本帖最后由 紅塵。破 于 2016-8-19 14:59 編輯
今天整理資料時發現了一年前做的四足仿生機器人,當時買了一個四足仿生機器人的骨架,畫了個板子,寫了個測試代碼,能完成
發表于 08-19 14:59
【NUCLEO-F412ZG申請】六足仿生機器人
,大部分六足機器人采用了仿昆蟲的結構,6條腿分布在身體的兩側,身體左側的前、后足及右側的中足為一組,右側的前、后足和左側的中足為另一組,分別組成兩個三角形支架,依靠大腿前后劃動實現
發表于 11-14 18:54
淺談差速機器人的純軌跡跟蹤仿真
差速機器人的純軌跡跟蹤仿真(Matlab)剛入門,有的地方不對,煩請大家指正。目錄差速機器人的純軌跡跟蹤仿真(Matlab)1 差速機器人運
發表于 09-01 08:11
四足機器人的機構設計
四足機器人屬于復雜機電系統,需要綜合生物、機械、電子、控制等學科內容,具體涉及仿生機構設計、靈巧運動機構設計、高性能驅動器制造,行走穩定性控制、強化學習等在內的多個研究方向。其中,機構設計是保障四足
發表于 09-15 06:54





 工商網監
工商網監
評論