 什么是機器人最優控制和逆最優控制
什么是機器人最優控制和逆最優控制
機器人在執行期望目標任務時,我們希望機器人能精確地達到人類所預設的目標,那么我們就來理解下什么是最優控制和逆最優控制。
因此,最優控制是期望最小化或者最大化目標。
很顯然最優控制和逆最優控制是一種相反的關系:
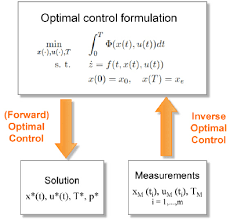
最優控制理論是數學優化的一個分支,它處理在一段時間內為一個動態系統找到一個控制,使目標函數得到優化。目標是找到目標控制律,使得優化目標函數。
而逆最優控制作為將生物運動傳遞給機器人的有前途的方法。逆最優控制有助于(a)理解和識別基于測量的生物運動的潛在最優標準,以及(b)建立可用于控制機器人運動的最優控制模型。
逆最優控制問題的目的是確定——對于給定的動態過程和觀察到的解——產生解的優化準則。從數學的角度來看,逆最優控制問題是困難的,因為它們需要解決最優控制問題中的參數識別問題。
在最優控制中,總的來看,其本質就是讓系統以某種最小的代價來讓系統運行,當這個代價被定義為二次泛函,且系統是線性的話,那么這個問題就稱為線性二次問題,設計的控制器(即問題的解)可以稱為LQR(Linear Quadratic Regulator)線性二次調節器。
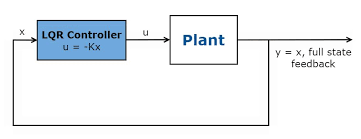
若被動系統是線性化表示,成本函數描述為二次泛函,那么這種問題就可以被認為是線性二次問題,求解此問題,即可以成為LQR問題!
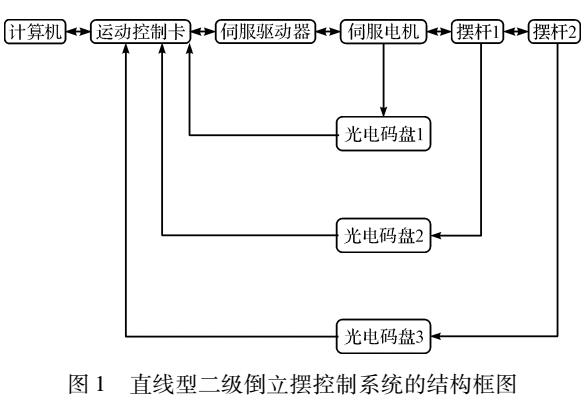
常見的模型為倒立擺模型:
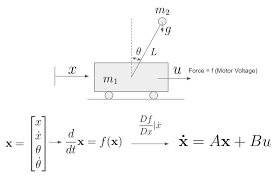
尋找模型的最佳參數的問題被轉化為一個 LQR 問題,該問題最大限度地減少了人力并優化了閉環行為。
LQR 控制器的系統具有良好的穩定性,并且在某個性能指標方面是最佳的。然而,當系統高度不確定時,LQR 控制不能保證魯棒穩定性。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
112文章
16203瀏覽量
177418 -
機器人
+關注
關注
210文章
28207瀏覽量
206538 -
調節器
+關注
關注
5文章
832瀏覽量
46367
發布評論請先 登錄
相關推薦
主動隊列管理建模及最優控制策略
主動隊列管理建模及最優控制策略針對主動隊列管理(AQM)研究中缺乏系統的理論分析的問題,引入最優控制理論進行分析,得到了主動隊列管理的數學模型,該模型包括兩個差分方程,分別描述隊列長度和平均隊列長度
發表于 06-14 00:14
0038《最優控制理論》科學出版社-2003.pdf(5M)
;fromuid=286650038《最優控制理論》科學出版社-2003.pdf(5M)希望大家多頂頂,提升提升人氣。`
發表于 12-16 08:49
主動隊列管理建模及最優控制策略
針對主動隊列管理(AQM)研究中缺乏系統的理論分析的問題,引入最優控制理論進行分析,得到了主動隊列管理的數學模型,該模型包括兩個差分方程,分別描述隊列長度和平均隊列長
發表于 05-25 21:44
?17次下載
大純滯后對象的最優控制
本文針對工業過程控制中普遍存在的大純滯后對象,從最優控制的角度,研究了大純滯后對象的LQ逆問題,給出了一般的設計過程。仿真研究表明,運用最優控制的方法,能夠使大純
發表于 06-15 11:32
?7次下載
狀態時滯系統的輸入多采樣最優控制
本文針對離散狀態時滯系統,首先將其變形為無時滯形式,設計出最優控制器;然后運用離散提升技術對輸入進行多采樣,得到擴展的離散系統模型,再運用最優控制技術對擴展系
發表于 08-10 10:53
?16次下載
最優控制在直流調速系統中的應用
提出了一種以線性二次型性能指標為基礎的綜合性最優控制問題,研究了單輸入系統開環和閉環特征多項式與性能指標中的加權矩陣之間的關系,根據這些關系可以確定一個具有指定閉
發表于 06-15 16:43
?42次下載
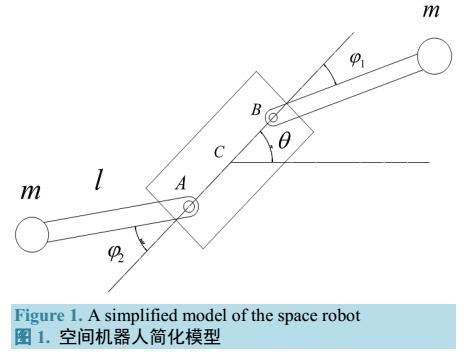
基于Legendre偽譜法的空間機器人姿態運動的最優控制
的姿態會隨著機械臂的相對運動而發生變化,增大了載體姿態控制難度的同時,為控制其姿態也提供了一種方法。Fernandes等根據空間機器人的非完整性質提出空間機器人的關節運動規劃的
發表于 01-31 13:48
?0次下載
直線二級倒立擺系統的H∞魯棒最優控制
針對存在模型參數不確定性和外部擾動的直線型二級倒立擺系統的穩擺控制問題,對如何實現倒立擺系統魯棒穩定的同時,還保證其達到期望的最優控制性能和H性能指標的穩定性控制問題進行了研究。基于狀態反饋
發表于 03-06 14:11
?1次下載
LQR控制算法之最優控制
LQR算法是最優控制中經典的算法,而且LQR是一個應用較多的控制算法,所以在這里我以最優控制為起點介紹LQR控制算法。
注意LQR控制






 工商網監
工商網監
評論