 機器人最優控制的程序實現
機器人最優控制的程序實現
程序實現:
在MATLAB中可采用的語法為:
[K,S,P] = lqr(sys,Q,R,N)
[K,S,P] = lqr(A,B,Q,R,N)
也就是說,目的是計算最佳增益矩陣K
下面以一個例子實現LQR的解法;
M = 85.5; %input 1
m = 8.5; %input 2
b = 0.6;
I = 0.008;
g = 9.8;
l = 0.5;
x0 = [0.2 0 0 0];
a1 = 1;
a2 = 2;
Q = 20;
R=10;
%states = {'x' 'x_dot' 'phi' 'phi_dot'};
p = I*(M+m)+M*m*l^2; %denominator for the A and B matrices
A = [0 1 0 0;
0 -(I+a2*l^2)*b/p (a2^2*g*l^2)/p 0;
0 0 0 1;
0 -(a2*l*b)/p a2*g*l*(a1+a2)/p 0];
B = [ 0;
(I+a2*l^2)/p;
0;
a2*l/p];
[K,S,P] = lqr(A,B,Q,R)
運行可以得到:
K =
-1.4142 -62.4810 67.4838 187.5249
S =
1.0e+05 *
0.0088 0.1913 -0.0265 -0.1230
0.1913 7.3677 -1.0374 -4.8827
-0.0265 -1.0374 0.5767 1.7582
-0.1230 -4.8827 1.7582 5.9016
P =
-0.0262 + 0.0258i
-0.0262 - 0.0258i
-0.4016 + 0.0093i
-0.4016 - 0.0093i
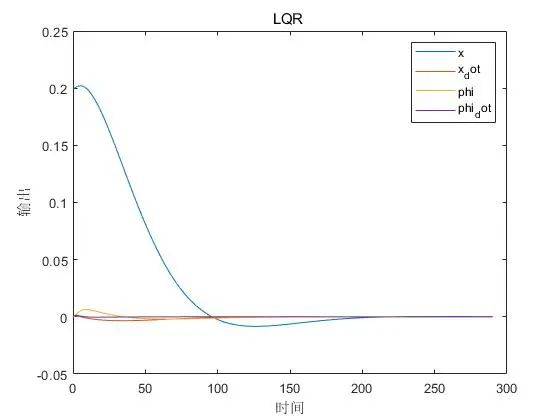
程序可視化:
sys = ss(A,B,eye(4),[0;0;0;0]);
sysclosed = ss(A-B*K,[0;0;0;0],eye(4),[0;0;0;0]);
figure(15)
[ycl,tcl,xcl] = initial(sysclosed,x0);
plot(tcl,ycl(:,1),tcl,ycl(:,2),tcl,ycl(:,3),tcl,ycl(:,4))
title('LQR ')
xlabel('時間')
ylabel('輸出')
legend('x','x_dot','phi','phi_dot')
LQR 啟發式作為基于樣本的運動規劃算法(例如 RRT 或 RRT*)的擴展,可以是相對低成本的距離度量,并在具有復雜或欠驅動動態的域中找到最佳計劃。
% LQR Steer
%===================================
function x_new = LQRSteer( x_nearest, x_rand, K_rand )
% This function contains system's explicit dynamics
global model;
m = model.phy.m;
l = model.phy.l;
b = model.phy.b;
g = model.phy.g;
h = model.h;
u = -K_rand*( x_nearest - x_rand )';
x_dot = [ x_nearest(2), ( u - b*x_nearest(2) - m*g*l*sin(x_nearest(1)) ) ];
x_new = x_nearest + x_dot*h;
end
此MATLAB function可以從來執行系統動力學描述;
% LQR Near
%===================================
function X_near_ids = LQRNear( x_new, S_new, id_nearest )
global GNodes nun;
% Define Neighborhood Radius
gamma = 1; d = 2;
ner = gamma*( log(nun+1)/nun )^(1/d);
% Allocate and Assign to Output
X_near_ids = id_nearest;
for i = 1 : nun
x = GNodes( i, 1:2 );
cost = (x-x_new)*S_new*(x-x_new)';
if cost < ner
X_near_ids(end+1) = i;
end
end
X_near_ids = unique(X_near_ids);
end
輸入期望的初始參數,根據定義算法的邏輯可實現期望數值的求解;
線性二次高斯(LQG)優化控制設計方法,它是線性二次估計器(LQE)(即卡爾曼濾波器)和線性二次調節器(LQR)的組合。
對于逆最優問題,建議讀者閱讀 Zhifei 和 Joo的文章。最優控制理論的逆問題通過二次逼近 (BOBYQA) 技術 的邊界優化來適應和解決。
人工操作任務的成本函數是從給定的演示中建模的,同時考慮與環境的接觸。引入逆Karush-Kuhn-Tucker(KKT)逆最優控制算法來學習具有接觸約束的操縱任務的成本函數。
最優控制理論的主要關注點是找出在滿足某些最優標準的同時將給定系統推向所需狀態的控制信號。
線性二次調節器 (LQR) 是優化控制的一種變體,其中系統動力學由一組線性微分方程建模。此外,最優標準由包含系統狀態和輸入的二次函數描述。
考慮智能體之間的關系,也可以用LQR來求解出最優解;
尋找規定機器人阻抗模型的最佳參數的問題被轉化為線性二次調節器 (LQR) 問題,該問題最大限度地減少了人力并優化了 HRI 系統針對給定任務的閉環行為。
為了避免對人體模型知識的要求,可以使用積分強化學習來解決給定的 LQR 問題。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
matlab
+關注
關注
182文章
2963瀏覽量
230199 -
機器人
+關注
關注
210文章
28231瀏覽量
206618 -
最優控制
+關注
關注
0文章
9瀏覽量
7142
發布評論請先 登錄
相關推薦
主動隊列管理建模及最優控制策略
主動隊列管理建模及最優控制策略針對主動隊列管理(AQM)研究中缺乏系統的理論分析的問題,引入最優控制理論進行分析,得到了主動隊列管理的數學模型,該模型包括兩個差分方程,分別描述隊列長度和平均隊列長度
發表于 06-14 00:14
什么是工業機器人
` 本帖最后由 大連云港 于 2015-1-19 11:02 編輯
工業機器人是面向工業領域的多關節機械手或多自由度的機器人。工業機器人是自動執行工作的機器裝置,是靠自身動力和
發表于 01-19 10:58
辰漢-如何實現服務機器人的運算與控制
的能力。紅外模塊可以實現對一些外部電器的操控,電池和電池管理模塊給整個機器人的運轉提供能量。辰漢-硬件結構是實現服務機器人運算和控制的基礎,
發表于 06-09 17:18
基于Matlab和VR技術的移動機器人建模及仿真
,虛擬模型準確地模擬了真實移動機器人的動力學特征 ; 通過對模型的參數修改 ,為實現對真實機器人的最優控制和設計提供了可信的參考方案
發表于 09-20 06:24
大純滯后對象的最優控制
本文針對工業過程控制中普遍存在的大純滯后對象,從最優控制的角度,研究了大純滯后對象的LQ逆問題,給出了一般的設計過程。仿真研究表明,運用最優控制的方法,能夠使大純
發表于 06-15 11:32
?7次下載
基于Legendre偽譜法的空間機器人姿態運動的最優控制
的姿態會隨著機械臂的相對運動而發生變化,增大了載體姿態控制難度的同時,為控制其姿態也提供了一種方法。Fernandes等根據空間機器人的非完整性質提出空間機器人的關節運動規劃的
發表于 01-31 13:48
?0次下載
使用Matlab和VR技術實現移動機器人的建模及仿真的方案說明
地模擬了真實移動機器人的動力學特征;通過對模型的參數修改,為實現對真實機器人的最優控制和設計提供了可信的參考方案.
發表于 10-25 11:32
?10次下載
如何使用Matlab和VR技術實現移動機器人的建模和仿真
準確地模擬了真實移動機器人的動力學特征; 通過對模型的參數修改,為實現對真實機器人的最優控制和設計提供了可信的參考方案
發表于 01-15 17:20
?13次下載
LQR控制算法之最優控制
LQR算法是最優控制中經典的算法,而且LQR是一個應用較多的控制算法,所以在這里我以最優控制為起點介紹LQR控制算法。
注意LQR控制

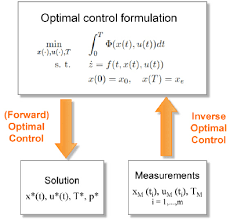
什么是機器人最優控制和逆最優控制
機器人在執行期望目標任務時,我們希望機器人能精確地達到人類所預設的目標,那么我們就來理解下什么是最優控制和逆最優控制。 因此,最優控制是期望





 工商網監
工商網監
評論