 機器人關節Joint描述
機器人關節Joint描述
機器人模型中的剛體最終要通過關節joint連接之后,才能產生相對運動。
URDF中的關節有六種運動類型。
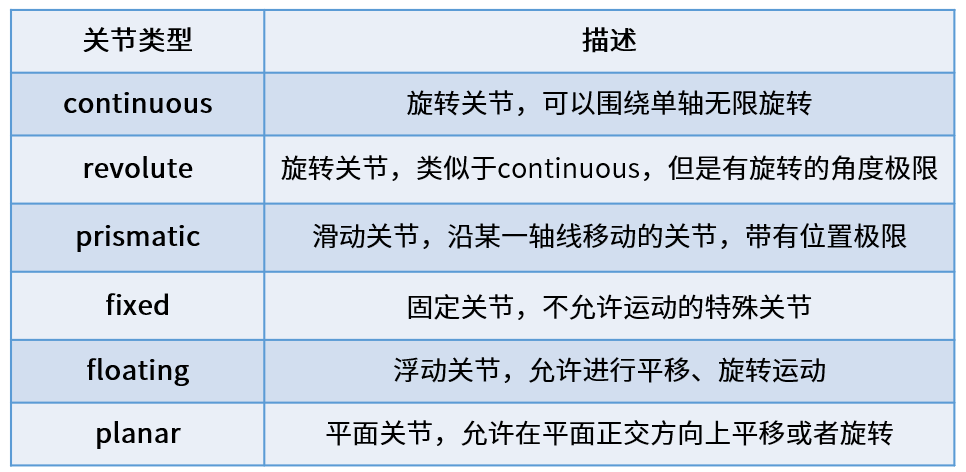
continuous,描述旋轉運動,可以圍繞某一個軸無限旋轉,比如小車的輪子,就屬于這種類型。
revolute,也是旋轉關節,和continuous類型的區別在于不能無限旋轉,而是帶有角度限制,比如機械臂的兩個連桿,就屬于這種運動。
prismatic,是滑動關節,可以沿某一個軸平移,也帶有位置的極限,一般直線電機就是這種運動方式。
fixed,固定關節,是唯一一種不允許運動的關節,不過使用還是比較頻繁的,比如相機這個連桿,安裝在機器人上,相對位置是不會變化的,此時使用的連接方式就是Fixed。
Floating是浮動關節,第六種planar是平面關節,這兩種使用相對較少。
在URDF模型中,每一個link都使用這樣一段xml內容描述,比如關節的名字叫什么,運動類型是哪一種。

parent標簽:描述父連桿;
child標簽:描述子連桿,子連桿會相對父連桿發生運動;
origin:表示兩個連桿坐標系之間的關系,也就是圖中紅色的向量,可以理解為這兩個連桿該如何安裝到一起;
axis表示關節運動軸的單位向量,比如z等于1,就表示這個旋轉運動是圍繞z軸的正方向進行的;
limit就表示運動的一些限制了,比如最小位置,最大位置,和最大速度等。
Info
ROS中關于平移的默認單位是m,旋轉是弧度(不是度),所以這里的3.14就表示可以在-180度到180度之間運動,線速度是m/s,角速度是rad/s。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28224瀏覽量
206593 -
運動控制
+關注
關注
4文章
567瀏覽量
32828 -
模型
+關注
關注
1文章
3177瀏覽量
48722 -
機器臂
+關注
關注
0文章
18瀏覽量
6301
發布評論請先 登錄
相關推薦
工業機器人的基本結構
各種類型的機器人(如2圖):①直角坐標型(如2圖a是三個直線坐標軸);②圓柱坐標型(如2圖b是兩個直線坐標軸和一個回轉軸);③球坐標型(如2圖c是一個直線坐標軸和兩個回轉軸);④關節型(如2圖d是三個
發表于 01-19 10:36
機器人的關節結構是怎樣設計的?
`在論壇看到了那個波士頓動力公司的斑點 獵豹 大狗 野貓 這幾種軍用機器人,也看了那些個測試視頻,他們的那些關節結構是怎樣設計的啊?是液壓還是機械?`
發表于 03-09 11:41
工業機器人的工作原理
)機器人的系統結構一臺通用的工業機器人,按其功能劃分,一般由3個相互關連的部分組成:機械手總成、控制器、示教系統,如圖所示。機械手總成是機器人的執行機構,它由驅動器、傳動機構、機器人臂
發表于 12-15 10:25
工業機器人的末端關節旋轉該精確控制?
時間的積累。本文以KUKA為例,分協作機器人iiwa和傳統機器人KR兩個大系列。協作機器人iiwa 當前主流的協作機器人都采用“模塊化”思想的關節
發表于 11-01 11:08
微型機器人關節使用超聲波電機的優勢
`隨著中國科學技術發展迅猛,未來中國將成為為微型智能機器人大國。如今智能機器人需求量不斷增長,其控制系統和自動化主要的產品超聲波電機的需求也將大幅度增長,機器人手指關節用超聲波電機作為微型智能
發表于 11-02 11:21
工業機器人可分為哪幾種
(Service Robots)。其中,目前工業機器人又佔全球機器人80%的市佔率,遠高于服務型機器人。若以機械結構來看,工業機器人可區分為單軸機器
發表于 09-07 07:13
直角坐標機器人&關節機器人的區別詳解
完成沿著X、Y、Z、(A、B、C)軸上的線性運動來進行的。 直坐標機器人 直坐標機器人控制系統 ? 關節機器人 關節
直角坐標機器人&amp;關節機器人的區別詳解
主要是通過完成沿著X、Y、Z、(A、B、C)軸上的線性運動來進行的。直坐標機器人控制系統關節機器人關節機器人,也稱

劍指人形機器人賽道,泰科機器人推出重磅關節模組
泰科機器人幾年前就研判人形機器人賽道將會成為熱點,決定研發人形機器人適用的關節模組,經過艱苦的技術攻堅,泰科機器人推出了一系列適用于仿生

常見的多關節機器人有哪些?具有什么特點?
關節機器人是當今工業領域中最常見的工業機器人的形態之一,適合用于諸多工業領域的機械自動化作業。多關節機器人是指由多個可動






 工商網監
工商網監
評論