") 飛行控制PID算法的作用解析
飛行控制PID算法的作用解析
PID控制器是一種線性控制器,它主要根據(jù)給定值和實際輸出值構(gòu)成控制偏差,然后利用偏差給出合理的控制量,目前,人們通過科學研究獲得了諸多具有優(yōu)異控制效果的算法和理論,但在工程應用領域,基于經(jīng)典PID的控制算法仍然是最簡單、最有效的控制方案。目前主流的幾款開源飛控中,無一例外地都是采用PID控制算法來實現(xiàn)無人機的姿態(tài)和軌跡控制。
那么PID控制器算法能解決什么問題呢?以多旋翼為例,在沒有控制系統(tǒng)的情況下,直接用信號驅(qū)動電機帶動螺旋槳旋轉(zhuǎn)產(chǎn)生控制力,會出現(xiàn)動態(tài)響應太快,或者太慢,或者控制過沖或者不足的現(xiàn)象,多旋翼根本無法順利完成起飛和懸停動作。為了解決這些問題,就需要在控制系統(tǒng)回路中加入PID控制器算法。在姿態(tài)信息和螺旋槳轉(zhuǎn)速之間建立比例、積分和微分的關(guān)系,通過調(diào)節(jié)各個環(huán)節(jié)的參數(shù)大小,使多旋翼系統(tǒng)控制達到動態(tài)響應迅速、既不過沖、也不欠缺的現(xiàn)象。
下面我們簡單的舉個例子讓大家了解一下PID的作用,我們先以一個自動駕駛的小車來舉例子,為什么用小車呢而不用多旋翼來舉例子呢?因為用小車舉例,可以看到小車的行進軌跡,根據(jù)軌跡我們可以很直觀的看到PID對控制的影響,便于理解PID的作用。
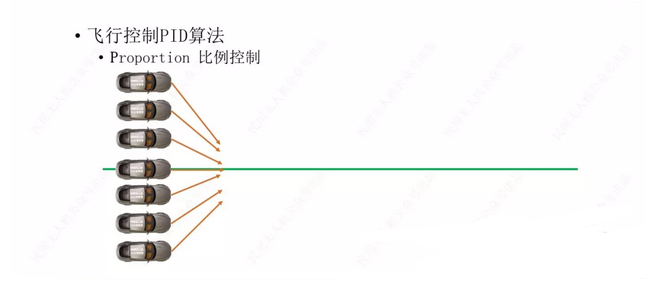
我們先講P,比例控制。現(xiàn)在我們想讓這個小車沿著綠線向前走,我們給P設置一個固定的值,這個值可以讓離開綠線的小車向綠線的方向行駛,離的越遠,方向盤打的角度越大,離的越近,方向盤打的角度越小。橙色的箭頭表示小車行進的方向
比如這個小車在這個位置,我們設置了一個中等大小的P值,想要沿著綠線走,在比例控制下路徑是這樣的,因為小車有一定的速度,到達綠線時因為慣性的原因又向前運動了,然后再根據(jù)中等P值向回打方向盤,當?shù)竭_綠線時,同樣因為慣性的原因沖過了頭,因為小車越接近綠線,方向盤打的越小,所以小車每經(jīng)過一次綠線,它的偏差就越來越小,所以隨著小車多次的往復運動,就能離綠線越來越近,理論上最終能夠行駛在綠線上面。
如果我們把P值設置的比較大,它的路徑是這樣的,因為方向盤打的角度比較大,所以小車比中等P值的時候較早的到達綠線,但同樣因為慣性的原因會多次往返綠線的兩側(cè),也是一次比一次接近綠線,因為它方向盤角度打的比較大,所以會比中等P值往返的次數(shù)要多,最終經(jīng)過多次往返,理論上它會離綠線越來越近,最終到達綠線上方。
如果我們把P值設置的比較小,也就是方向盤打的角度比較小,它的路徑是這樣的,小車會較晚到達綠線,因為慣性會往返綠線兩側(cè),但是因為方向盤角度小,小車可以在較少的往復次數(shù)下接近綠線。
所以我們對比一下設置這三種P值的結(jié)果,在小車與綠線相同距離的情況下,P值越大,小車的反應越快,P值越小,小車的反應越慢,所以這三個小車第一次到達綠線的時間是不一樣的。雖然P值大能夠較快的到達綠線,但是反應比較劇烈,總是因為過快沖過了頭。相反P值小的反應比較平緩,但是它反應太慢,我們有時候接受不了。
什么樣的P值是合理的呢,就是設置后,小車的反應不是很劇烈,反應時間你也能夠接受,那這就是一個相對合理的P值。
那有沒有一種辦法讓它反應再快一點,反應又不那么劇烈呢,那就要用到接下來我們要講的微分控制了。
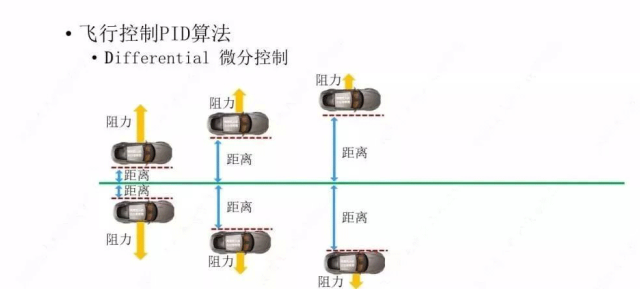
我們?yōu)榱瞬蛔屵@個小車沖過頭,我們再給它加一個力,這個力就是D,讓這個力來起一個作用,就是讓小車越接近綠線的時候,接近綠線的速度越慢,小車越遠離綠線的時候,接近綠線的速度相對較快,這個接近綠線的速度不是小車前進的速度,是小車與綠線平行線之間的相對速度。這個D大家可以理解為小車靠近綠線的一個阻力。
假設我們設置了一個相對合理的P值,在P值不變的情況下,微分控制中D值的變化會有怎樣的結(jié)果。比如我們設置了一個比較合適的D值,微分控制(D)讓小車在靠近綠線時,接近綠線的速度比較慢,這樣比例控制(P)就可以很輕松的讓小車到達綠線上方行駛。
如果D值過大,也就是小車靠近綠線的阻力過大,這樣會讓小車需要比較長的時間才能到達綠線上方。
如果D值設置的過小,也就是小車靠近綠線的阻力過小,那微分控制(D)就不會對比例控制產(chǎn)生大的影響,所以雖然小車能夠較快到達綠線,但小車需要多調(diào)整幾次,在綠線的兩側(cè)往復幾次后才能到達綠線上方行駛。
那這樣看來比例控制(P)和微分控制(D)的配合,貌似已經(jīng)很完美了。為什么還要有積分控制(I)呢?
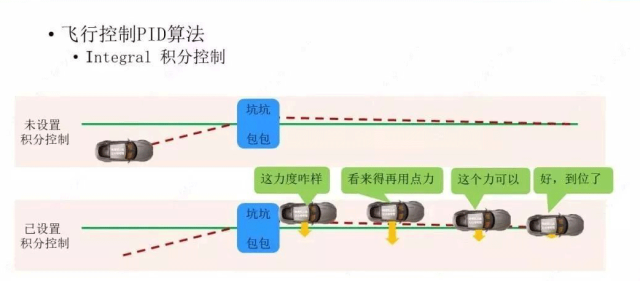
設置合適的P值和D值,可以讓小車很好的沿著綠線一直走,但路上不是很平坦,會有些坑坑包包,或者其他的一些干擾,路況不好就會讓小車的行進路線發(fā)生偏移,比如小車在這里遇到了坑坑包包,它的行進路線就會變成這樣,稍微偏離了綠線一點,因為微分控制(D)讓小車離綠線越近時,靠近綠線的速度越慢,比例控制(P)讓小車在接近綠線時,方向盤又打的比較小,所以小車要走一段路才回到綠線上面。
有沒有辦法讓它更快回到綠線上面呢,所以我們再給它加一個力,這個力就是I,積分控制。我們讓積分控制起這樣的作用:如果P和D的調(diào)節(jié)不是很理想的話,就讓I幫他倆一把,向P的方向上加一個力,這樣可以讓小車更快回到目的路徑。
設置了I以后,I會根據(jù)誤差和誤差經(jīng)歷的時間進行積分,然后決定施加給目標方向的力的大小,就能夠讓小車回到目標軌跡上。
一個合適的I值,可以讓小車偏離軌跡后,I可以在合適的時間給P一個合適的力,讓小車快速的回到綠線上面;
如果I值過大,積分控制(I)調(diào)整的力就會比較大,它在幫P的時候會用力過猛,會讓小車沖過綠線,下次幫忙的時候還是用力過猛,P表示很無奈,畢竟I也是好心,經(jīng)過幾次調(diào)整后,小車終于回到綠線上面,但我們看小車的軌跡線產(chǎn)生了一定的振蕩;
如果I值過小,積分控制(I)調(diào)整的力就會比較小,就像有一個手無縛雞之力的柔弱小鮮肉一樣,幫不上太大的忙,所以小車回到正確軌跡的時間就會比較長。
說完了PID控制對小車的影響,下面我們再說說PID控制對多旋翼的影響。比如這架多旋翼想要作的是保持機身的水平平穩(wěn)。
我們先從P開始,如果P值設置的過大,哪怕機身有那么一丁點傾斜,飛行器都會用稍大一些的力去調(diào)整,結(jié)果用力過猛,又繼續(xù)向回調(diào)整,這樣飛行器就會頻繁的調(diào)整自己的水平狀態(tài),導至機身產(chǎn)生振動。
如果P值設置的過小,飛行器的水平調(diào)整就會顯得力不從心,比如空氣中的微風讓飛行器發(fā)生了傾斜,飛行器向回調(diào)整的力比較小,所以需要長一點的時間才能調(diào)平,這樣讓我們覺得它反應有點慢。
比如我們經(jīng)過多次測試設置了一個比較合適的P值,可以讓飛行器有一個我們能接受的反應時間,但稍有一點過沖,會有一些震蕩,接下來再設置D值,讓D值消除震蕩,如果D值設置過大,會讓飛行器恢復平衡時間過長,反應變慢,
如果設置了一個過小的D值,會導致效果不明顯,飛行器還是會有震蕩。
比如我們又設置了一個合適的D值,可以讓飛行器反應不是很慢,也不會有明顯的震蕩。接下來我們再設置一下I值。這里的I我們可以這么理解,I根據(jù)飛行器的反應時間,適當?shù)膸兔Γ绻w行器反應慢了,他就會幫一下,能讓它的反應快一點。但是如果值設置的過大,這個幫忙可能會用力過猛,導致過沖。
如果I值設置過小,它的幫忙就沒有太大的作用,還是不會讓飛行器反應更快。所以設置一個合適的I值需要多次的測試,讓它的幫忙起作用,又不會用力過猛。有些人怕麻煩就不設置I值了,其實也沒有太大的影響,只不過離完美還差那么一點。
PID的設置是一個非常復雜的過程,對于一般的使用者來說是非常難的。所以有些廠商也想出了一些辦法。
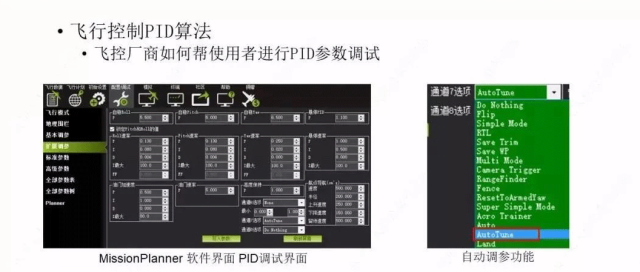
比如3DR的開源飛控APM和PIXHWAK,咱們看它的調(diào)參軟件中,PID部分有這么多要調(diào)的地方,對于一般的用戶來說是比較有難度的,所以它加了一個自動調(diào)參的功能,就是這個AutoTune,可以把遙控器上的一個開關(guān)設置成自動調(diào)參,找一片開闊地讓飛行器起飛,然后把遙控器上的自動調(diào)參開關(guān)打開,飛控就開始自己控制飛行器進行飛行測試,然后根據(jù)測試情況自動設置一個比較合適的PID參數(shù)。
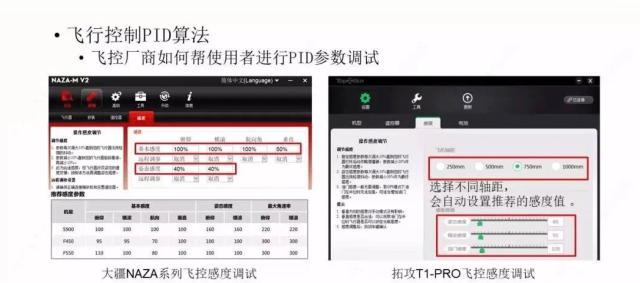
有些廠商作的就更簡單了,直接在調(diào)參軟件里加了一個感度的配置,這個感度大家可以理解為敏感度 ,數(shù)值越大,敏感度越高,不同的軸距都有不同的推薦感度設置。
左面的這個是大疆NAZA飛控的調(diào)參軟件,調(diào)參軟件說明書里就有一個不同軸距的推薦感度值,右面的拓攻更簡單,直接選擇軸距,就能自動設置推薦的感度值。
這些廠商的調(diào)參軟件里一般都會有姿態(tài)感度和基本感度,或者叫穩(wěn)定感度。姿態(tài)感度是指飛行器對遙控指令的敏感程度,基本感度或穩(wěn)定感度是指飛行器對于外界干擾反應的敏感程度。這樣就比PID理解起來要簡單的多了。
審核編輯:湯梓紅
-
控制器
+關(guān)注
關(guān)注
112文章
16198瀏覽量
177398 -
PID
+關(guān)注
關(guān)注
35文章
1471瀏覽量
85286 -
無人機
+關(guān)注
關(guān)注
228文章
10336瀏覽量
179609 -
控制算法
+關(guān)注
關(guān)注
4文章
166瀏覽量
21686 -
自動駕駛
+關(guān)注
關(guān)注
783文章
13682瀏覽量
166144
原文標題:PID:飛控算法調(diào)試動圖
文章出處:【微信號:c-stm32,微信公眾號:STM32嵌入式開發(fā)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
初步解析飛思卡爾控制電機PID算法代碼
介紹一種基于四軸飛行器的雙閉環(huán)PID控制算法

PID控制算法的C語言實現(xiàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論