 開源四軸協作機械臂ultraArm激光雕刻技術案例!
開源四軸協作機械臂ultraArm激光雕刻技術案例!
注意安全事項
開始之前,請確保您已采取適當的安全措施,例如用于激光操作的防護眼鏡、滅火器和通風良好的區域。
引言
隨著科技的不斷進步,激光雕刻技術已經成為當今制造行業中不可或缺的一部分。它以其高精度、高效率和廣泛的材料適應性,在眾多領域展現出獨特的優勢。本文將深入探討激光雕刻的工作原理,以及如何通過一款四軸全金屬機械臂來實現精準的雕刻路徑跟隨。我們將詳細解析激光頭的發射原理、激光與材料的相互作用,以及機械臂如何通過精確的步進電機控制,配合先進的路徑規劃軟件,來完成從簡單圖案到復雜設計的精細雕刻。無論是對于工業生產,還是個人創客項目,激光雕刻技術的應用都展現出了無限的可能性。接下來,讓我們一起揭開激光雕刻技術的神秘面紗,探索它與機械臂結合的創新應用。
產品
ultraArm P340
ultraArm P340,由Elephant Robotics開發,是一款桌面型的高性能機器人臂,專為教育和自動化領域設計。它具有緊湊的金屬結構,僅占用A5紙張大小的空間。配備高效步進電機,ultraArm P340擁有±0.1mm的重復定位精度和高穩定性。作為一款4軸協作機器人,它能夠執行雕刻、繪畫和抓取等多種任務,適用于多種應用場景。機器人臂搭載Arduino兼容的Mega2560控制板,具備340mm的工作半徑,并可配備不同附件以適應各種功能需求。這些特性使得ultraArm P340成為適用于教育和實踐的多功能機器人解決方案。

激光雕刻
激光雕刻是一種利用高能量激光束對物質表面進行雕刻的技術。它通過激光器產生的激光束精確地照射到材料表面,利用高熱能迅速將材料局部蒸發或熔化,從而在材料表面留下永久性的標記或圖案。與傳統的機械雕刻方法相比,激光雕刻具有無接觸、精度高、速度快和適應性強等優點。激光雕刻是一種利用高能量激光束對物質表面進行雕刻的技術。它通過激光器產生的激光束精確地照射到材料表面,利用高熱能迅速將材料局部蒸發或熔化,從而在材料表面留下永久性的標記或圖案。與傳統的機械雕刻方法相比,激光雕刻具有無接觸、精度高、速度快和適應性強等優點。

目前市面上激光雕刻機常見光源主要有CO2光源,光纖光源,紫光光源,綠光光源,二極管光源,其激光波長不同,雕刻效能差異也很大。
我們今天使用到的激光雕刻機是CO2激光雕刻機,主要是和雕刻的材質有木頭,皮革,塑料等非金屬材料。
激光雕刻的原理
這里是一臺大型的CO2激光雕刻機的視頻,整個運作的流程。可以借助這個視頻了解激光雕刻是怎么工作的。
https://www.youtube.com/watch?v=d5pru79E1ak
CO2激光雕刻機的工作原理主要分為:
激光產生:在CO2激光雕刻機中,激光是通過激發含有二氧化碳的氣體混合物來產生的。這個混合物通常還包含氮氣、氦氣和/或氙氣。當電流通過這種氣體混合物時,它激發CO2分子,產生激光光。
激光放大和聚焦:產生的激光經過特殊設計的鏡子和光學系統進行放大和聚焦。通過聚焦激光,可以將其能量集中在非常小的點上,從而達到高能量密度。
材料加工:聚焦的激光束照射到材料表面,由于激光的高能量,材料在激光作用點會迅速升溫,導致材料熔化、蒸發或者通過化學分解去除,從而實現切割或雕刻。
控制系統:激光雕刻機通常配備有計算機控制系統,可以精確控制激光束的位置、移動速度和功率。這允許用戶根據需要設計復雜的圖案或文字,并精確地在材料上進行雕刻或切割。
冷卻系統:由于激光器在工作時會產生熱量,因此需要一個冷卻系統來維持激光器的適宜工作溫度,確保機器的穩定性和效率。
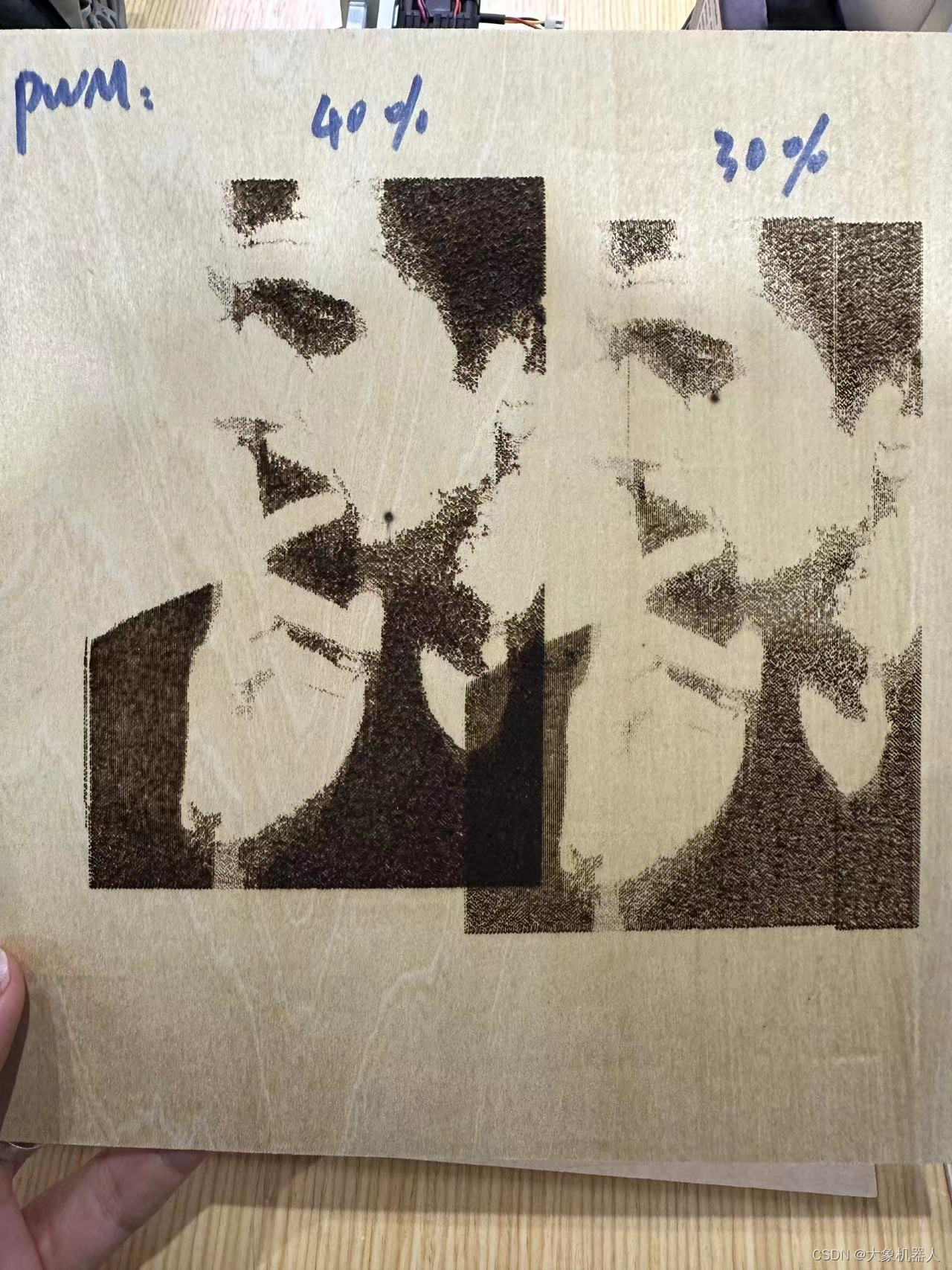
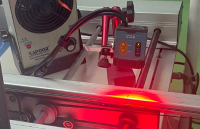
PWM,脈沖寬度調制是用來控制激光的輸出功率的,這種技術通過控制激光器發射激光的時間長度來實現功率控制。可以從圖片中很明顯的得出一個結論,當pwm的百分比越高,嗦雕刻出來的效果就越深。
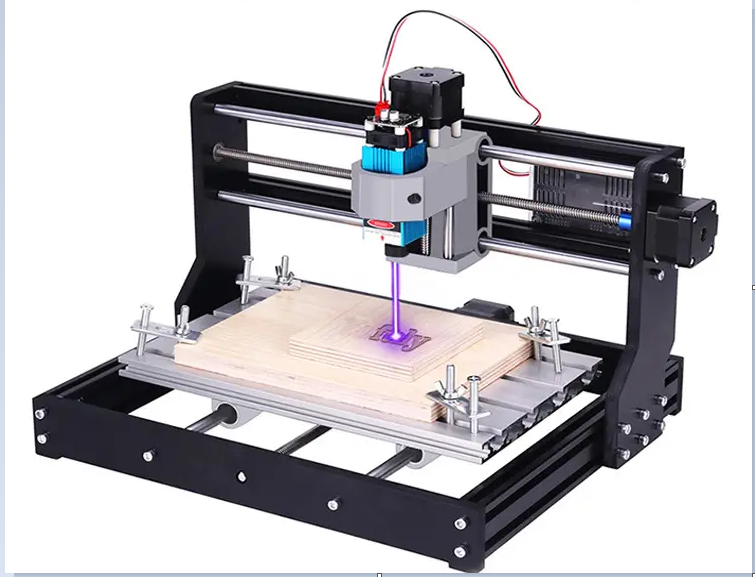
CO2激光雕刻機
CO2的激光雕刻機已經非常普遍了,隨便一搜索就有各式各樣的,我們使用的是這一款。



這種雕刻機就很方便,能夠通過IO接口來進行控制,可以裝配在UltraArm末端。
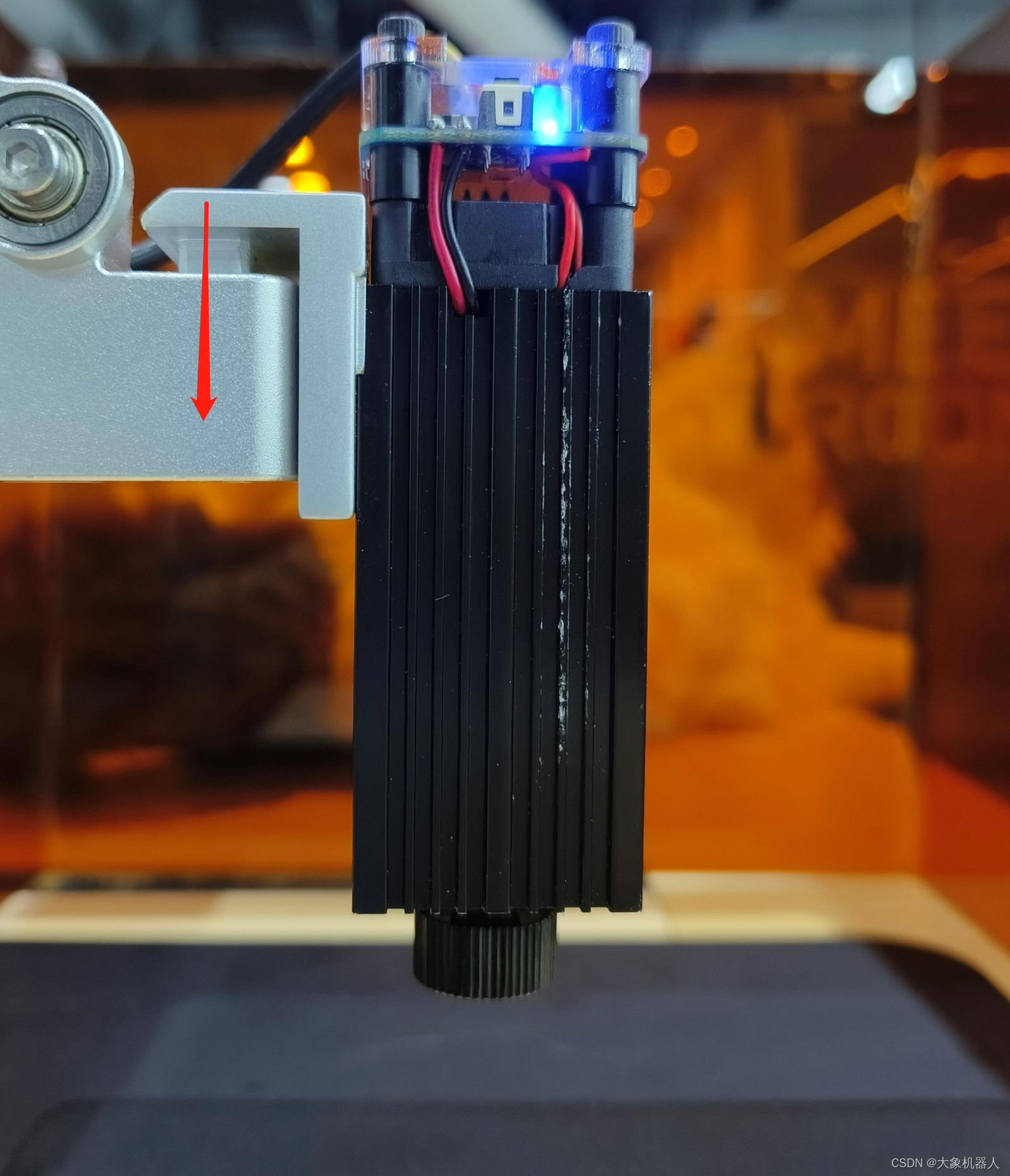
安裝在機械臂末端

與機械臂IO口連接

在下方墊上鋁合金板,避免下方物被激光射穿
接下來只要根據圖案的路徑,讓機械臂跟隨路徑就能夠進行定制圖案的雕刻,也是很關鍵的一個部分,激光雕刻的控制系統。
Elephant Luban-控制系統
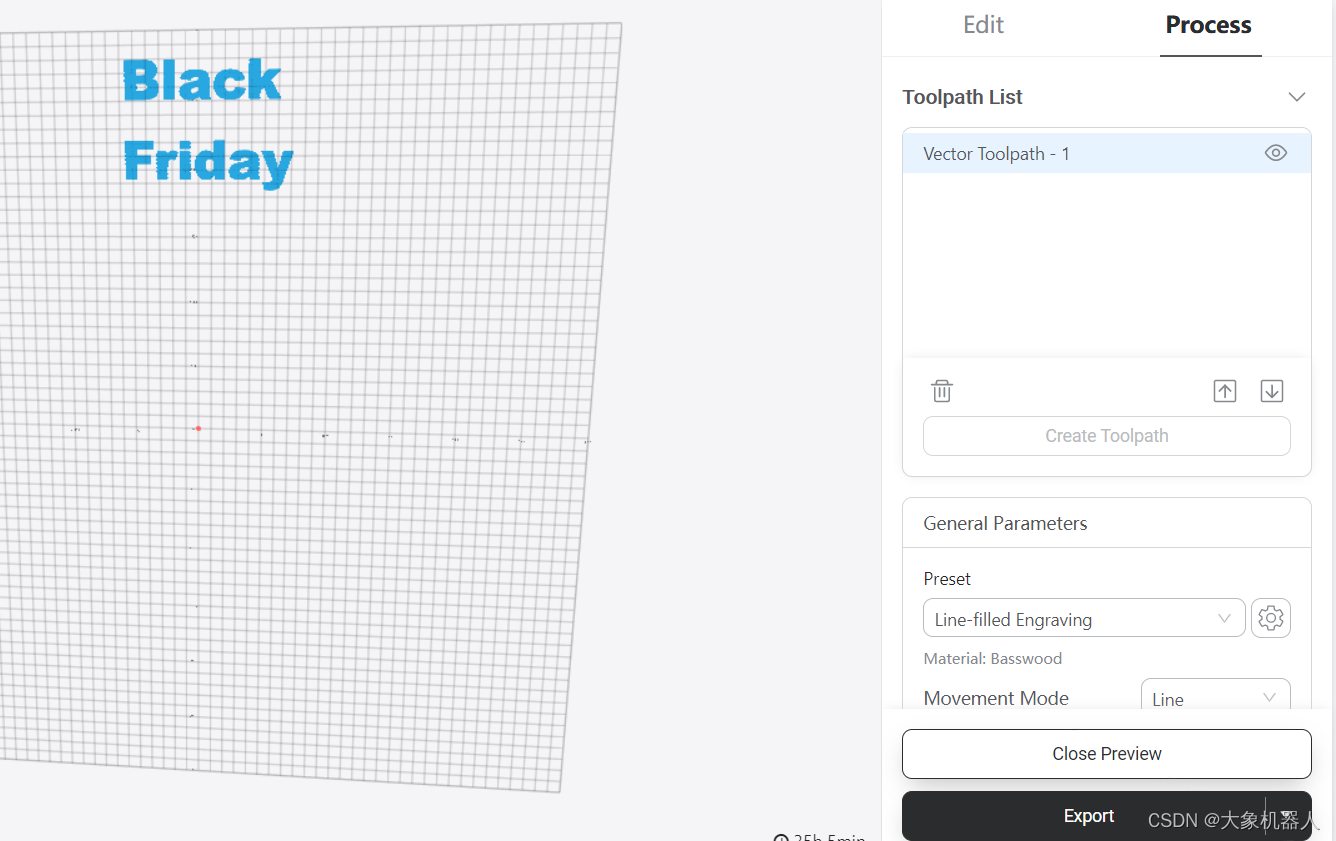
Elephant Luban是一款軟件,集成了ultraArm P340的寫字畫畫功能,激光雕刻功能。可以在Luban上面進行圖形的制作以及機械臂的畫畫和雕刻功能。
luban interface
圖像處理
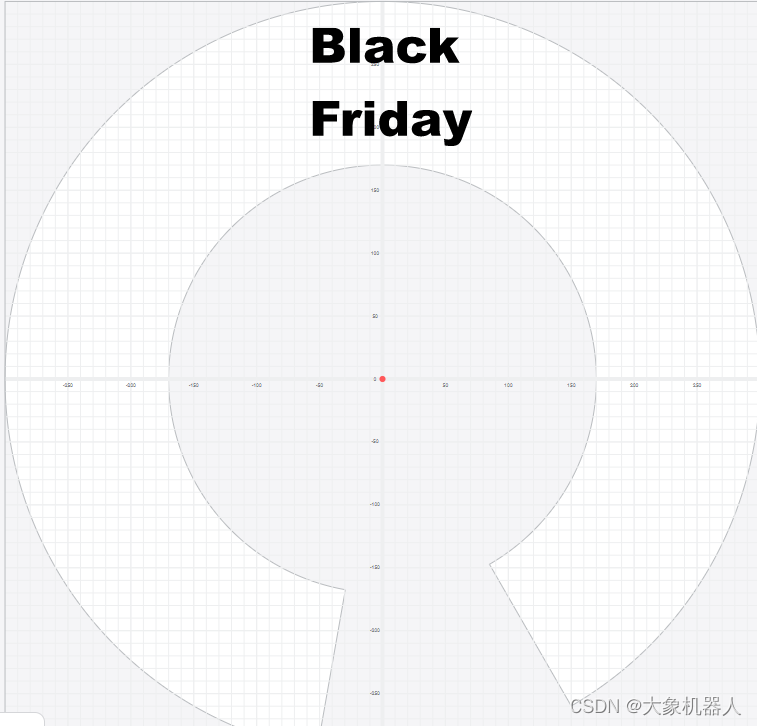
要在機械臂的工作半徑內設計圖形,luban是專門適配ultraArm的軟件,白色區域的是機械臂可以達到的范圍。所以我們要在白色的區域進行圖案的繪制。
對目標圖像進行柵格化處理,轉化為機械臂能夠理解的路徑/指令,通常是G-code代碼文件。
路徑規劃算法
在生成G-Code代碼文件時,會根據算法設計出一套機械臂最為合適的路徑規劃。這里用到了商旅性問題(TSP)算法。https://en.wikipedia.org/wiki/Travelling_salesman_problem
TSP:它的目標是找到一條路徑,使得旅行推銷員可以訪問一系列城市各一次并最終返回出發城市,同時保證總旅程的距離或成本最小。例如下圖有四個城市,他們分別是0,1,2,3,他們之間往來的代價如下圖:
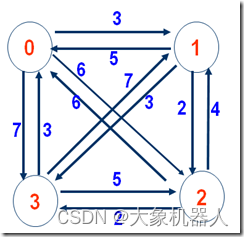
最優解:0->1->2->3->0 =10
同樣的道理,通過對圖形的分析,確定雕刻路徑最有順序,以減少移動時間和提高效率。生成 的G-code代碼如下,發送點位給機械臂去執行。
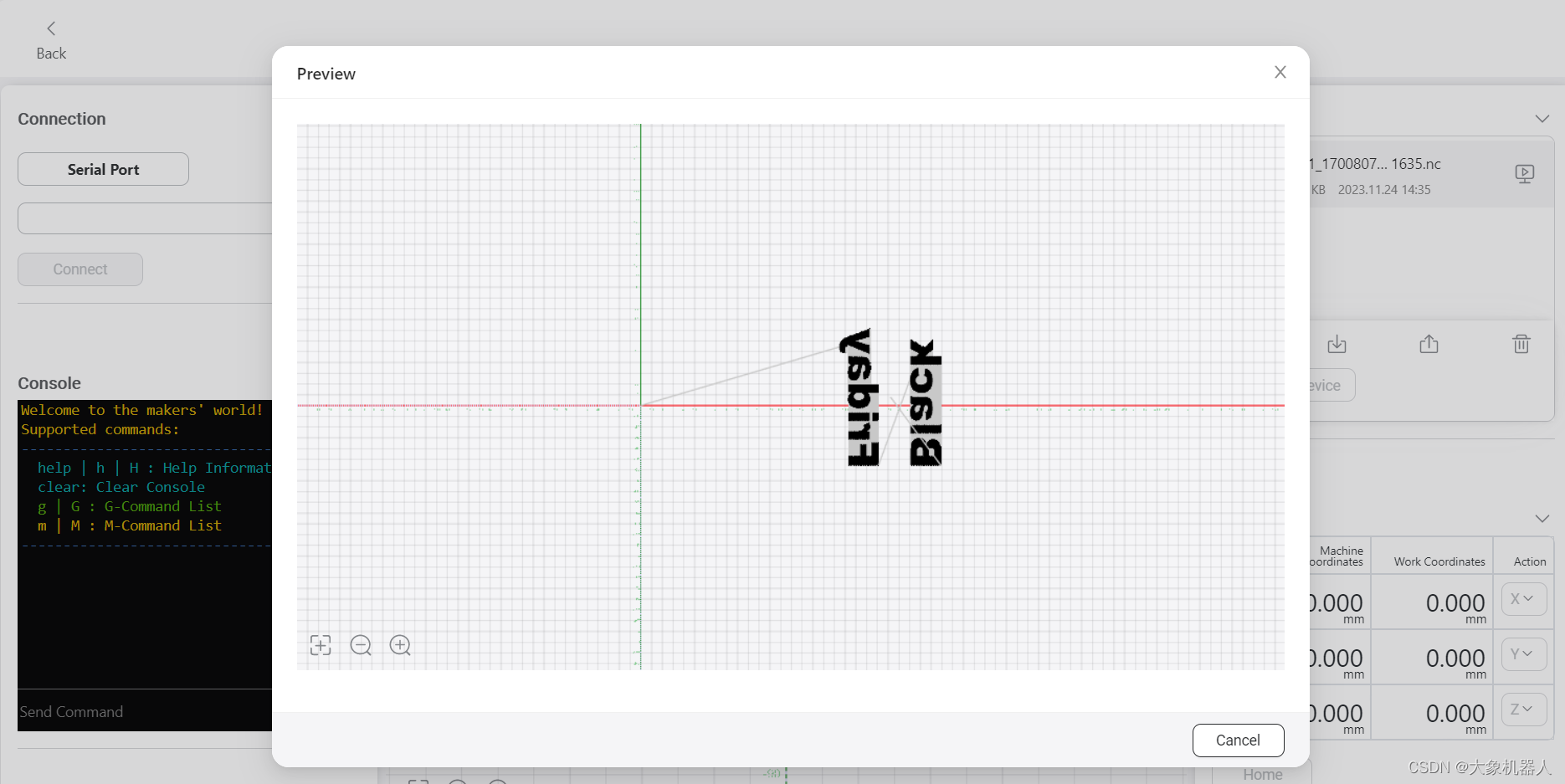
導入到工作區域,可以預覽機械臂運行的軌跡(灰色的線),以及激光雕刻的效果圖。
總結
通過文章的介紹,即使是一個對機械臂了解不深的人也能夠快速上手操作實現diy作品。不用十分鐘,就可以設計出一個獨特的圖案并進行雕刻,操作起來十分的便捷。雖然機械臂看著小巧,但它的性能足以完成雕刻應用。
不僅如此,ultraArm p340搭載著高精度的步進電機,也可以實現一些3C輕工業,裝配,質檢,分揀等重復性的工作。ultraArm的多功能性和靈活性使其成為一個非常實用的工具,適合多種不同的應用場景和需求。
審核編輯 黃宇
-
開源
+關注
關注
3文章
3251瀏覽量
42402 -
python
+關注
關注
56文章
4782瀏覽量
84453 -
激光雕刻
+關注
關注
0文章
20瀏覽量
7078 -
機械臂
+關注
關注
12文章
509瀏覽量
24493
發布評論請先 登錄
相關推薦
怎樣做ZL-01C單臂數顯小動物腦立體定位儀實驗?
得利捷固定式讀碼器讀取金屬表面激光雕刻DPM碼的優勢
開源六軸協作機器人myCobot 320結合人臉表情識別情緒!


大象機器人開源協作機械臂機械臂接入GPT4o大模型!

桌面型激光雕刻機的發展前景及TMC應用優勢
機械臂技術的前沿探索:年度案例回顧!
如何去提升機械臂的位置控制性能?

大象機器人六軸協作機械臂myCobot 320 進行手勢識別!

使用ChatGPT學習大象機器人六軸協作機械臂mechArm!

宏集七軸機械臂,以精準力控實現柔性拋光打磨!

【開源獲獎案例】四軸機械臂控制系統

七軸開源協作機械臂myArm視覺跟蹤技術!
開源六軸協作機械臂MechArm案例演示!





 工商網監
工商網監
評論