") 如何在樹莓派Pico上使用搖桿?
如何在樹莓派Pico上使用搖桿?
模擬二軸拇指操縱桿(俗稱搖桿)是一種模擬操縱桿,相比于「方向」操縱桿更加準確和靈敏,它帶有一個「按下選擇按鈕」。因為它是模擬的,所以需要使用樹莓派 Pico 上支持模擬輸入的引腳來讀取,下面我們選擇的是 GP26 和 GP27。分別來讀取 X 和 Y。而按鈕按下狀態(tài)可使用數(shù)字引腳 GP22 來讀取。
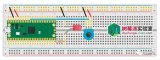
硬件連接
搖桿的 GND 接 Pico 的 GND。
搖桿的 +5V 接 Pico 的 VSYS。
搖桿的 VRX 接 Pico 的 GP27。
搖桿的 VRY 接 Pico 的 GP26。
搖桿的 SW 接 Pico 的 GP22。
具體代碼如下。其中當(dāng)讀取到的模擬量不超過 600 時判定為「左」或者「下」,而當(dāng)讀取到的模擬量大于或等于 60000 時判定為「右」或者「上」,介于這中間時判定為「中」。這個標(biāo)準也可以微調(diào)來控制搖桿的靈敏度。
import machine import utime X_axis = machine.ADC(26) Y_axis = machine.ADC(27) press = machine.Pin(22, machine.Pin.IN, machine.Pin.PULL_UP) while True: X_axis_value = X_axis.read_u16() Y_axis_value = Y_axis.read_u16() if X_axis_value <= 600: print("X: "+"Left ", end='') elif X_axis_value >= 60000: print("X: "+"Right ", end='') elif 600 < X_axis_value < 60000: print("X: "+"Middle ", end='') if Y_axis_value <= 600: print("Y: "+"Down") elif Y_axis_value >= 60000: print("Y: "+"Up") elif 600 < Y_axis_value < 60000: print("Y: "+"Middle") if press.value() == 0: print("Pressed") utime.sleep(0.5)
運行之后,上下左右撥動搖桿,可以看到 Shell 窗口輸出的方向變化。按下?lián)u桿,會看到 Shell 窗口輸出「Pressed」。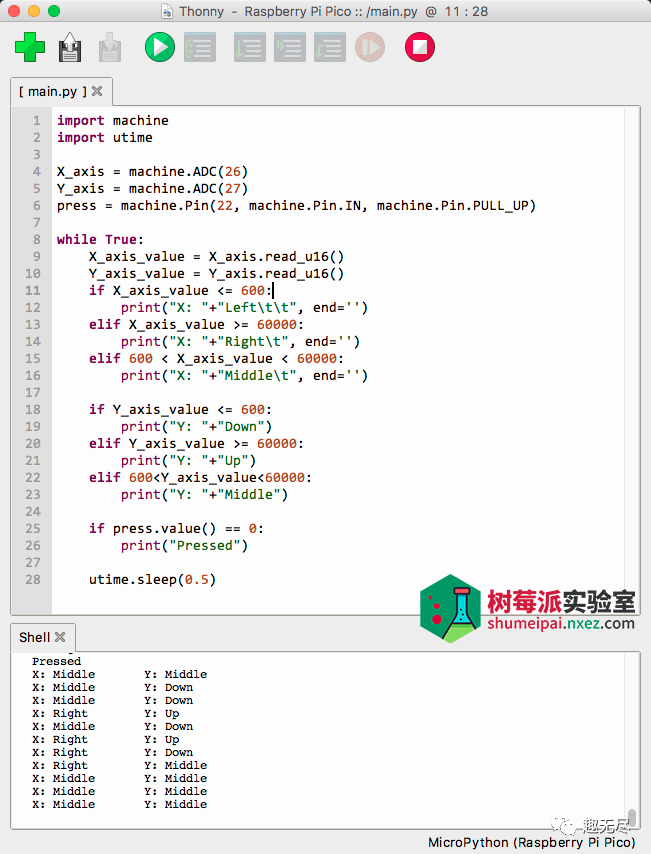
審核編輯:劉清
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
GND
+關(guān)注
關(guān)注
2文章
529瀏覽量
38653 -
樹莓派
+關(guān)注
關(guān)注
116文章
1698瀏覽量
105524
原文標(biāo)題:在樹莓派 Pico 上使用搖桿
文章出處:【微信號:趣無盡,微信公眾號:趣無盡】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
如何在樹莓派Pico上用PWM實現(xiàn)LED呼吸燈呢?
樹莓派 Pico 上的模擬-數(shù)字轉(zhuǎn)換器只能以一種方式工作,它將模擬信號轉(zhuǎn)換為微控制器可以理解的數(shù)字信號。
發(fā)表于 10-07 17:46
?1315次閱讀
樹莓派pico入門學(xué)習(xí)筆記(一)相關(guān)資料推薦
樹莓派pico入門學(xué)習(xí)筆記選擇自己熟悉的編程語言樹莓派pico提供C/C++和micropyth
發(fā)表于 07-01 09:28
樹莓派Pico的相關(guān)資料分享
關(guān)注、星標(biāo)公眾號,直達精彩內(nèi)容1月22日,樹莓派基金會最新發(fā)布一款低成本、高性能的微控制器開發(fā)板Raspberry Pi Pico,新產(chǎn)品相比普通樹莓
發(fā)表于 11-03 08:44
樹莓派Pico的相關(guān)資料推薦
1月22日,樹莓派基金會最新發(fā)布一款低成本、高性能的微控制器開發(fā)板Raspberry Pi Pico,新產(chǎn)品相比普通樹莓派體積更小,售價僅4
發(fā)表于 02-07 07:37
在樹莓派Pico上實現(xiàn)懷舊的AppleII仿真
樹莓派Pico采用他自己的處理器RP2040,雙核M0,133MHz。為了體驗它的雙核編程環(huán)境和性能,我用它來實現(xiàn)一個AppleII仿真,當(dāng)然是在AppleWin代碼基礎(chǔ)上移植改造的。
發(fā)表于 05-24 20:58
樹莓派也出MCU了?樹莓派Pico來了!
關(guān)注、星標(biāo)公眾號,直達精彩內(nèi)容1月22日,樹莓派基金會最新發(fā)布一款低成本、高性能的微控制器開發(fā)板Raspberry Pi Pico,新產(chǎn)品相比普通樹莓
發(fā)表于 10-28 10:36
?11次下載

樹莓派Pico:僅4美元的MCU
1月22日,樹莓派基金會最新發(fā)布一款低成本、高性能的微控制器開發(fā)板Raspberry Pi Pico,新產(chǎn)品相比普通樹莓派體積更小,售價僅4
發(fā)表于 12-04 13:06
?13次下載
樹莓派pico入門學(xué)習(xí)筆記(一)
樹莓派pico入門學(xué)習(xí)筆記選擇自己熟悉的編程語言樹莓派pico提供C/C++和micropyth
發(fā)表于 12-17 18:42
?21次下載
基于樹莓派pico的可編程游戲手柄設(shè)計
方案介紹組件12x12x7.3mm 瞬時觸覺按鈕按鈕樹莓派Pico通用 D1286464 OLED 顯示屏操縱桿模塊 PS210 歐姆電阻?組裝將樹莓
發(fā)表于 12-26 15:10
?0次下載
樹莓派PICO pio使用
在樹莓派 Pico 小小的板子上總是能讓我們發(fā)現(xiàn)一些驚喜。其所使用的RP2040芯片還具備8個可編程I/O(PIO)狀態(tài)機,用于自定義外圍設(shè)備
樹莓派Pico Flash驅(qū)動踩坑記錄
樹莓派 pico 帶有 2MB 的 Flash 資源,以下是我基于官方 Pico C/C++ SDK 對接 Flash 驅(qū)動時踩到的一些坑和解決辦法。
如何在樹莓派Pico上使用紅外線接收模塊?
在樹莓派 Pico 上使用紅外線接收模塊(HX1838 型),我們采用開源的 pico_ir 庫。





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論