 采集激光雷達如何提取照片中的角點像素
采集激光雷達如何提取照片中的角點像素
提取照片中的角點像素
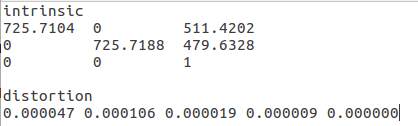
- 首先需要把最上面獲得的相機內參畸變糾正參數以下圖的格式保存在
data/parameters/intrinsic.txt文件下 - distortion下面對應5個畸變糾正參數,按順序是k1和k2 (RadialDistortion),p1和p2 (TangentialDistortion),最后一個是k3,一般默認是0
配置cornerPhoto.launch文件中的照片路徑:
<?xml version="1.0" encoding="UTF-8"?><launch> <param name="intrinsic_path" value="$(find camera_lidar_calibration)/data/parameters/intrinsic.txt" /> <!-- intrinsic file --> <param name="input_photo_path" value="$(find camera_lidar_calibration)/data/photo/1.bmp" /> <!-- photo to find the corner --> <param name="ouput_path" value="$(find camera_lidar_calibration)/data/corner_photo.txt" /> <!-- file to save the photo corner --> <node pkg="camera_lidar_calibration" name="cornerPhoto" type="cornerPhoto" output="screen"></node >< /launch>
運行
roslaunch camera_lidar_calibration cornerPhoto.launch
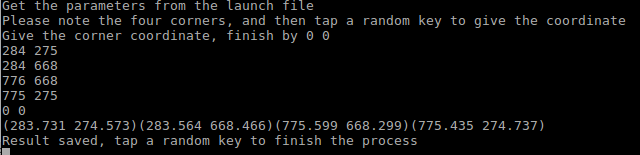
程序會在UI中打開對應的照片。在這個UI界面上只要把鼠標移到標定板的各個角上,窗口左下角就會顯示對應的坐標數據。按照雷達采集的角點的順序(左上角開始,逆時針),記錄下四個角點坐標。比如:
284 275
284 668
776 668
775 275
記錄完畢后選中顯示的圖片按任意鍵,進入坐標輸入流程。把記錄下的四個坐標”x y”按順序輸入,x和y中間要有空格(比如: “635 487”),輸入完成后輸入”0 0”即可結束輸入流程(如下圖例所示)。
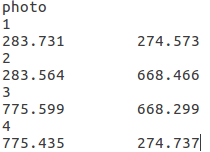
程序會算出四個更精確的float類型坐標顯示出來,并保存在data/corner_photo.txt中。然后按任意鍵結束整個流程。
更改cornerPhoto.launch文件中的照片路徑,重復上述流程,直至獲得所有照片的角點坐標。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
像素
+關注
關注
1文章
203瀏覽量
18560 -
相機
+關注
關注
4文章
1346瀏覽量
53520 -
激光雷達
+關注
關注
967文章
3940瀏覽量
189608
發布評論請先 登錄
相關推薦
激光雷達是自動駕駛不可或缺的傳感器
。激光雷達的定位,我們通過 IMU、慣性導航系統、編碼器和 GPS,得到一個預測的全局位置。當激光雷達實時掃描單次的點云數據后,我們會去結合單次的點云數據進行匹配,并進行特征
發表于 09-08 17:24
激光雷達分類以及應用
激光雷達實際上是一種工作在光學波段(特殊波段)的雷達,它的優點非常明顯:1、具有極高的分辨率:激光雷達工作于光學波段,頻率比微波高2~3個數量級以上,因此,與微波雷達相比,
發表于 09-19 15:51
常見激光雷達種類
單線激光雷達特點:結構簡單、掃描速度快、分辨率高、可靠性高、成本低。單線激光雷達實際上就是一個高同頻激光脈沖掃描儀,加上一個一維旋轉掃描。單線激光雷達雖然原理簡單但是可以有效、高頻的測
發表于 09-25 11:30
消費級激光雷達的起航
激光雷達仍各有其弊端:機械旋轉式單線雷達無法探測低矮障礙物,穩定性受旋轉部件影響,同時工業市場長期被國外激光雷達品牌把控,成本居高不下;多點(7-11點)拼接式
發表于 12-07 14:47
固態激光雷達
`我們已經對單線激光雷達司空見慣,其旋轉線掃的測量方式導致造成壽命問題和價格居高不下。 因此,北醒研發了CE30,它是一款具有大視場角的固態激光雷達。它可同時輸出132°水平視場、9度垂直視場范圍內
發表于 01-04 10:18
激光雷達
`我們已經對單線激光雷達司空見慣,其旋轉線掃的測量方式導致造成壽命問題和價格居高不下。 因此,北醒研發了CE30,它是一款具有大視場角的固態激光雷達。它可同時輸出132°水平視場、9度垂直視場范圍內
發表于 01-11 09:21
固態設計激光雷達
``一年一度的國際消費類電子產品展覽會(CES)已經完滿收官,短短的幾天時間里,我們見識了Intel無人飛機燈光秀、百度無人車、移動行李箱等眾多“黑科技”。而北醒不僅展示了性能卓越的固態激光雷達,在
發表于 01-25 09:41
激光雷達的核心重要指標到底是什么?
供定位導航使用的激光雷達,到底什么才是衡量它實用和可靠的指標? 測距范圍?采樣率?精度? 只是水面上的冰山一角! 作為主要用途是距離測量的激光雷達,其測量的最大距離(量程)自然是其最核心的指標。大部分
發表于 02-07 13:40
自動駕駛激光雷達新型探測器:近紅外MPPC
image sensor在幾百個點左右),三角測距速度居中,每秒在幾百個到幾千個點,脈沖測距法的測量速度最快,為每秒幾萬到幾十萬個點。因此,激光雷
發表于 09-10 14:21
TOF激光雷達
TOF 方案激光雷達是激光雷達新一代技術方案,本產品解決了如市場三角測試法等產品組裝問題難,價格成本高等問題,目前提供面陣及單光子技術,基于COM產品。集成了SPAD,TDC,DSP,RAM
發表于 06-07 00:03
一種不依賴于棋盤格等輔助標定物體實現像素級相機和激光雷達自動標定的方法
主要內容本文提出了一種不依賴于棋盤格等輔助標定物體,實現像素級相機和激光雷達自動標定的方法。方法直接從點云中提取3D邊特征,一避免遮擋問題,并且使用了精確度更高的深度連續邊。文中首先指
發表于 09-01 07:42
如何提取激光雷達的角點坐標
提取激光雷達的角點坐標 將激光雷達的rosbag轉為pcd文件 打開pcdTransfer.launch 設置 rosbag路徑 設置ros






 工商網監
工商網監
評論