") 智能車電磁采集濾波方法
智能車電磁采集濾波方法
采集濾波
簡單地一個adc采集獲取電感的數(shù)值是遠(yuǎn)遠(yuǎn)不夠,采集到的信息可能是不準(zhǔn)確的,需要采集多次,通過各種濾波算法處理才能得到一個較好的數(shù)值,這樣用起來才可靠。
在這里我只貼出一種算法,給大家簡單地描述下:
for(num = 0; num < 10; num++)
{
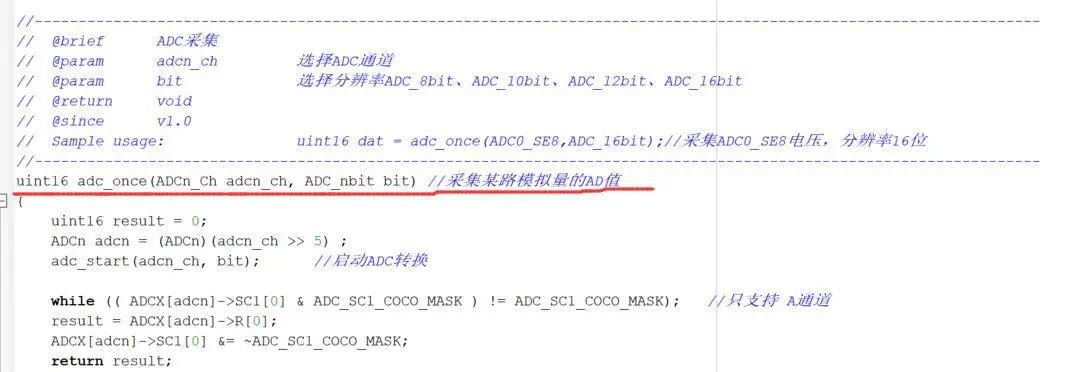
i = adc_once(ADC1_SE9,ADC_12bit); j = adc_once(ADC1_SE9,ADC_12bit); k = adc_once(ADC1_SE9,ADC_12bit); // B1-4
//2.取中值
if (i > j)
{
tmp = i; i = j; j = tmp;
}
if (k > j)
tmp = j;
else if(k > i)
tmp = k;
else
tmp = i;
sum+=tmp;
}
AD_VAL4=sum/10;
sum=0;
如上圖這里所用的濾波算法就是中值平均濾波法
方法就是:相當(dāng)于“中值濾波法”+“算術(shù)平均濾波法”,連續(xù)采樣10次,去掉一個最大值和一個最小值,最后再算術(shù)平均。
優(yōu)點(diǎn):融合了兩種濾波法的優(yōu)點(diǎn), 對于偶然出現(xiàn)的脈沖性干擾,可消除由于脈沖干擾所引起的采樣值偏差。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
濾波
+關(guān)注
關(guān)注
10文章
663瀏覽量
56596 -
電感
+關(guān)注
關(guān)注
54文章
6112瀏覽量
102162 -
電磁
+關(guān)注
關(guān)注
15文章
1075瀏覽量
51717 -
智能車
+關(guān)注
關(guān)注
21文章
402瀏覽量
76913
發(fā)布評論請先 登錄
相關(guān)推薦
基于電磁傳感器路徑識別的智能車控制系統(tǒng)
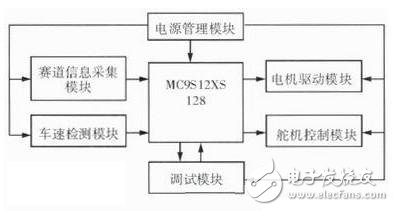
文中介紹一種基于電磁傳感器路徑識別的智能車控制系統(tǒng),系統(tǒng)采用Freescale16位單片機(jī)MC9S12XS128為核心控制器,利用4個電磁傳感器構(gòu)成的傳感器陣列采集路面信息,單片機(jī)獲得
發(fā)表于 03-29 17:23
?9426次閱讀
20.2-電磁桿在磁軌道的測試 零基礎(chǔ)入門智能車競賽 STM32電磁小車
20.2-電磁桿在磁軌道的測試 零基礎(chǔ)入門智能車競賽 智能車競賽 電磁桿原理圖 電磁循跡小車 智能車

20.3-使用兩個通道進(jìn)行電磁循跡 智能車競賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法
20.3-使用兩個通道進(jìn)行電磁循跡 智能車競賽 電磁桿原理圖 電磁循跡小車 智能車電磁組 STM

智能車設(shè)計(jì)基礎(chǔ)
智能車設(shè)計(jì)基礎(chǔ) 第10章.rar http://filemarkets.com/file/bai2471/9d9e6c95/智能車設(shè)計(jì)基礎(chǔ) 第3章.rar: http://www.t00y.com
發(fā)表于 10-21 21:11
樹莓派智能車AlphaBot系列教程
;catid=57樹莓派智能車AlphaBot教程1:人生若只如初見 ...樹莓派智能車AlphaBot教程2:直流電機(jī)控制 ... 樹莓派智能車AlphaBot教程3:避障樹莓派智能車
發(fā)表于 05-15 15:39
怎么實(shí)現(xiàn)基于電磁場檢測的尋線智能車設(shè)計(jì)?
本文采用通電導(dǎo)線產(chǎn)生的電磁場對智能車進(jìn)行引導(dǎo)。使用磁場信號引導(dǎo)車沿一定軌跡行走的優(yōu)點(diǎn)主要體現(xiàn)在磁場信號具有很好的環(huán)境適應(yīng)性,不受光線、溫度、濕度等環(huán)境因素的影響。
發(fā)表于 05-14 07:15
基于單片機(jī)的智能車設(shè)計(jì)
作為一名練習(xí)時長兩年半的練習(xí)生,來淺談下第十五屆智能車競賽規(guī)則。第十五屆智能車受疫情影響,終于在千呼萬喚中姍姍來遲。細(xì)讀規(guī)則,便會發(fā)現(xiàn)今年的智能車和往年有所不同。今年的組別設(shè)置有競速組4組:基礎(chǔ)四輪
發(fā)表于 09-02 06:29
電磁循跡智能車是由哪些模塊組成的
我的第一輛智能車—電磁循跡智能車以下是所用的模塊:舵機(jī),電機(jī),L298N驅(qū)動模塊,PID算法,OLED,電磁桿,ADC多路采集配置DMA,干
發(fā)表于 01-14 09:08
智能車的電磁循跡相關(guān)資料下載
飛思卡爾智能車—電磁循跡(組別通用),六路運(yùn)放,適用于電磁組所有組別,電路運(yùn)行穩(wěn)定,且移植性較強(qiáng)。
發(fā)表于 03-02 06:41
電磁智能車原理
電磁智能車原理 隨著計(jì)算機(jī)、微電子等技術(shù)的快速發(fā)展,智能化技術(shù)的開發(fā)越來越成熟,應(yīng)用的范圍也得到了極大的擴(kuò)展。目前,在企業(yè)生產(chǎn)技術(shù)不斷提高、對自動化技術(shù)要求不斷加深的環(huán)境下,智能車以及
電磁智能車原理
電磁智能車原理 我們可以看到很多的一些案例,比如電子競賽中已經(jīng)出現(xiàn)電磁智能車的設(shè)計(jì)案例,那么電磁智能車





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論