 機器視覺中精度和分辨率詳解!
機器視覺中精度和分辨率詳解!
在機器視覺中,分辨率作為衡量鏡頭和工業相機的重要參數,被大家熟知。精度是機器視覺中最核心的參數之一。我們一起來了解下這兩個參數以及在實際組合應用中,如何有效匹配鏡頭分辨率和相機分辨率。
精度需要從多個角度來說明,根據行業經驗,定位應用一般需要考慮3個像素波動,故原本10μm的精度要求,對應的定位精度約為3μm左右,而此時的視覺定位精度也就是像素精度,也叫像素分辨率或者像素當量,對于檢測應用,算法能力直接決定了視覺檢測精度與待檢測的最小缺陷之間的關系,通常也要考慮3-5個像素波動,但在晶圓檢測行業,如果算法好,我們也常遇到直接按最小缺陷的大小來定義視覺檢測精度的情況,此時視覺檢測精度也是像素精度,測量應用包含絕對精度和重復性精度,絕對精度指測量值和真實值之間的差異,重復性精度只用同一個物體去做靜態測量和多次擺放測量,看數據的實際波動性,當重復性精度足夠好時,絕對精度可以進行算法補償,因此實際應用中重復性精度更為重要。一般情況下,重復性精度可等同于像素精度。相機像素精度=單向視野范圍/相機單向分辨率。
1、鏡頭分辨率
鏡頭分辨率指的是它能分辨開兩個靠近的點物的能力。實際應用中,我們一般用“點物”經鏡頭成像后的“像”能被分辨的最小距離來表示,小于這個距離,我們就認為是一個點;而大于這個距離我們認為是兩個分開的點。除此之外,還有一種表示形式就是每毫米線對數LP/mm。鏡頭之所以存在分辨率,是因為像差和衍射導致的(此處不做詳細解釋),使從“物”到“像”發生了失真。點物經鏡頭成像后不再是一點,而變成一個光斑。
2、相機分辨率
相機的分辨率是指單位距離的像用多少個像素來顯示。假設像元尺寸大小是2.2μm,搭配0.5x的鏡頭,在測量22μm的物體時,由于22μm的物經0.5x的鏡頭后變成11μm的像,所以要用11 μm /2.2 μm =5個pixel來顯示,因此,單位距離的像要用11÷2.2/11=1/2.2個像素來顯示。即相機圖像分辨率為1/2.2 pixel/μm(實際就是像元尺寸的倒數)。從這個推導中我們得出:像元尺寸越小,相機的分辨率越高。
鏡頭分辨率與相機分辨率的有效匹配?
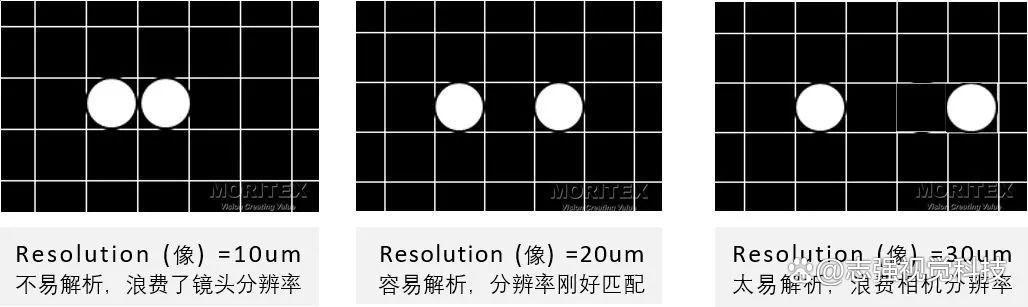
方法一:一般參數表中標記的分辨率為鏡頭的物方分辨率;用物方分辨率乘以放大倍率,得到像方分辨率;用算得的像方分辨率跟2倍的像元尺寸作比較:①如果鏡頭像方分辨率=2倍的像元尺寸,說明匹配剛剛好,誰都不浪費。
② 如果鏡頭像方分辨率>2倍的像元尺寸,則浪費了相機的分辨率。
③ 如果鏡頭像方分辨率<2倍的像元尺寸,則浪費了鏡頭的分辨率。
1Pixel=10um
 鏡頭分辨率和相機分辨率
鏡頭分辨率和相機分辨率方法二:經透鏡成的光學圖像,本身是一個擁有無窮多個點的模擬信號。但在圖像接收器(CCD或CMOS)接收過程中,由于像素和像素之間的間距形成了離散采樣。采樣定律也叫Shannon采樣定律,告訴我們對于頻率為f的模擬信號,為了不失真的恢復它,我們至少要用2f的頻率來采樣。
鏡頭分辨率的另一種表示形式是空間頻率,即每毫米的線對數LP/mm。因此,假設鏡頭的分辨率是n LP/mm,那么我們必須保證每毫米有2n個像素才行。這樣才能充分發揮鏡頭的分辨能力。例如:我們的ML-MC-XR系列和ML-M-UR系列都標注了分辨率是200LP/mm, 所以用每毫米有400個像素的芯片來接收圖像,才不會浪費鏡頭的分辨率,而每毫米400個像素,計算下來像元尺寸大小差不多2.2 μm,這也就是為什么我們會同時標注該款鏡頭支持2.2 μm像元。
其他注意事項:
1、鏡頭分辨率,只是鏡頭本身的參數,與相機無關。
2、相機的分辨率,也只是相機本身的參數,與像元尺寸大小有關,與鏡頭無關。
3、兩個相互獨立的分辨率一定要匹配,才不會浪費了某一方的性能。
4、無論是鏡頭還是相機,分辨率只是評價成像質量的參數之一,而且分辨率也不是越高越好,如果要評價整體性能,還要同時綜合考慮其他參數及具體應用。
-
相機
+關注
關注
4文章
1344瀏覽量
53510 -
分辨率
+關注
關注
2文章
1043瀏覽量
41881 -
機器視覺
+關注
關注
161文章
4345瀏覽量
120111 -
工業鏡頭
+關注
關注
0文章
87瀏覽量
3981
發布評論請先 登錄
相關推薦
Moritex 5X 高分辨率遠心鏡頭 助力晶圓檢測

VR顯示器分辨率的選擇
激光雷達分辨率對比方法與技巧詳解

華為pockets屏幕分辨率是多少
編碼器分辨率是什么意思 編碼器分辨率和脈沖數的關系

關于直線電機模組分辨率、定位精度和重復定位精度淺談
淺談相機的圖像分辨率

adc電路的分辨率怎么算
詳述ADC精度和分辨率的差異
ADC分辨率和精度的區別是什么
峰峰值分辨率與有效分辨率的區別
LED顯示屏刷新頻率和分辨率的區別






 工商網監
工商網監
評論