") 圖像邊緣原理介紹
圖像邊緣原理介紹
Part11. 圖像的邊緣
灰度圖像的分割算法大多都基于兩個性質(zhì):灰度的不連續(xù)性和灰度的相似性。
對于不連續(xù)性的灰度,可以以灰度突變?yōu)榛A(chǔ)分割一幅圖像,比如通過圖像的邊緣,基于邊緣進(jìn)行圖像分割。對于相似的灰度,可以通過區(qū)域進(jìn)行圖像分割。本文主要介紹圖像邊緣相關(guān)的內(nèi)容和原理。
圖像的邊緣是圖像中亮度變化比較大的點(diǎn)。圖像邊緣點(diǎn)的出現(xiàn)一般是由于深度的不連續(xù)、物體表面方向的變換、物體屬性變化或者場景照明變化引起。
邊緣是連通的邊緣像素集合。
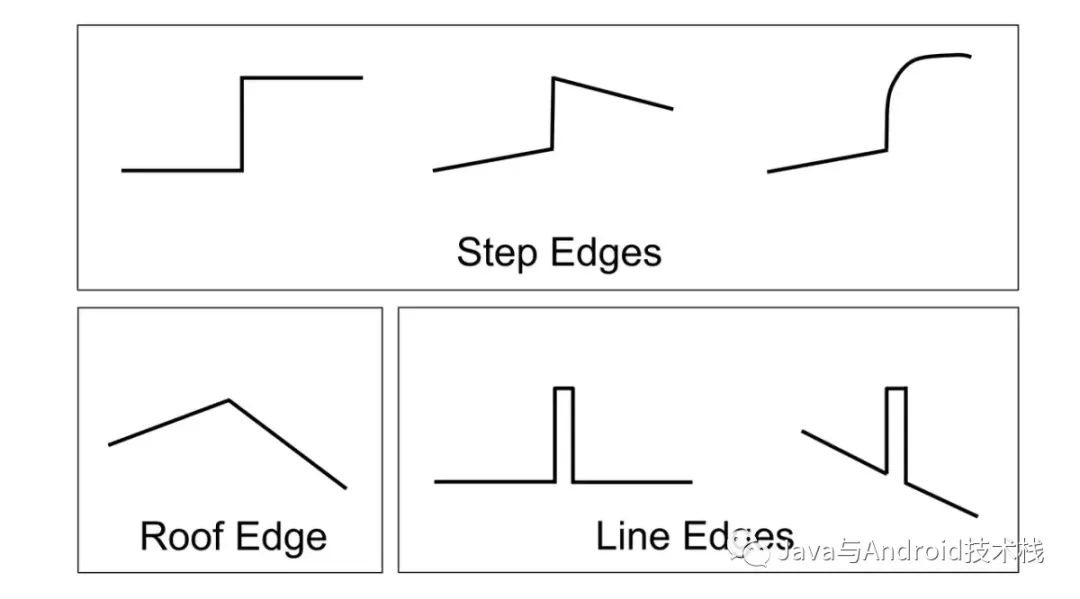
常見的邊緣類型有三種:
階梯形邊緣:即從一個灰度到比它高好多的另一個灰度。
屋頂形邊緣:它的灰度是慢慢增加到一定程度,然后慢慢減少。
線性邊緣:它的灰度從一個級別跳到另一個灰度級別之后然后回來。
 常見的邊緣類型.PNG
常見的邊緣類型.PNG
真實(shí)的圖像邊緣可能含有噪聲,不一定符合上述理想的邊緣模型。
Part22. 圖像的梯度
圖像可以看成是一個二維離散函數(shù),為了衡量圖像灰度的變化率,可以對二維離散函數(shù)進(jìn)行求導(dǎo)(連續(xù)的函數(shù)可以直接求導(dǎo),離散的函數(shù)只能通過一些方法來近似)。一階或二階導(dǎo)數(shù)都可以檢測局部灰度突變。
12.1 差分
差分,又名差分函數(shù)或差分運(yùn)算,一般是指有限差分,是數(shù)學(xué)中的一個概念,將原函數(shù) f(x) 映射到 f(x+a) - f(x+b) 。
差分運(yùn)算,相應(yīng)于微分運(yùn)算,是微積分中重要的一個概念。差分對應(yīng)離散,微分對應(yīng)連續(xù)。
差分可分為前向差分、反向差分和中心差分。
2.1.1 前向差分
當(dāng)自變量從變到時,函數(shù)的改變量,稱為函數(shù) f(x) 在點(diǎn)的步長為 的一階(前向)差分。
通常記為,,其中為差分算子。
同理,為 處的二階差分。
為 處的 n 階差分。
2.1.2 反向差分
一階反向差分為:
2.1.3 中心差分
一階中心差分為:
22.2 導(dǎo)數(shù)
數(shù)字函數(shù)的導(dǎo)數(shù)可用有限差分定義。
首先,將 展開為 x 的泰勒級數(shù),我們可以得到一維函數(shù) f(x) 在任意點(diǎn) x 處的一階導(dǎo)數(shù)的近似:
則:
當(dāng) 時
對于一階導(dǎo)數(shù),我們只使用線性項(xiàng),可得:
由此,用前向差分得到灰度差:
當(dāng) 時
對于一階導(dǎo)數(shù),我們同樣只使用線性項(xiàng),可得:
由此,用反向差分得到灰度差:
使用(2)式-(3)式,用中心差分可得:
中心差分的誤差較小,導(dǎo)數(shù)通常表示為中心差分。基于中心差分的二階導(dǎo)數(shù),使用(2)式+(3)式,可得:
即:
通常,一階導(dǎo)數(shù)和二階導(dǎo)數(shù)對分析邊緣有以下的結(jié)論:
一階導(dǎo)數(shù)通常在圖像中產(chǎn)生較粗的邊緣;
二階導(dǎo)數(shù)對精細(xì)細(xì)節(jié),如細(xì)線、孤立點(diǎn)和噪聲有較強(qiáng)的響應(yīng);
二階導(dǎo)數(shù)在灰度斜坡和灰度臺階過渡處會產(chǎn)生雙邊緣響應(yīng);
二階導(dǎo)數(shù)的符號可用于確定邊緣的過渡是從亮到暗還是從暗到亮。
計算圖像中每個像素位置的一階導(dǎo)數(shù)和二階導(dǎo)數(shù)的方法是空間卷積。
當(dāng)我們把圖像看做是一個二維離散函數(shù)時,通過上述方式可得 x、y 方向的二階導(dǎo)數(shù):
以及
根據(jù)拉普拉斯算子,圖像可以定義為
由(5)式+(6)式,可得:
(7)式可寫成如下 filter mask 的形式 :
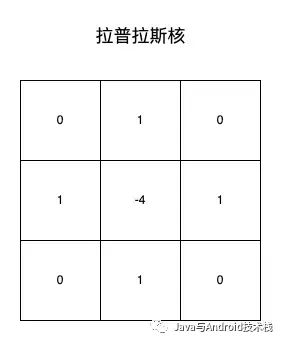 laplace核.png
laplace核.png
拉普拉斯可以對圖像進(jìn)行銳化,利用下面的公式:
其中,f(x,y) 表示原圖,g(x,y) 表示銳化后的圖像,c = -1,則
對于不同的拉普拉斯核,c 可能會取不同的值。
下面的代碼,展示了對灰度圖像進(jìn)行銳化以及對灰度圖像的拉普拉斯變換:
#include#include #include usingnamespacestd; usingnamespacecv; intmain(intargc,char*argv[]) { Matsrc=imread(".../girl.jpg"); imshow("src",src); Matgray; cvtColor(src,gray,COLOR_BGR2GRAY); imshow("gray",gray); Matdst,laplace; dst.create(src.size(),CV_8UC1); laplace.create(src.size(),CV_8UC1); intheight=gray.rows; intwidth=gray.cols; for(inti=1;i(i,j)=saturate_cast (5*gray.at (i,j)-gray.at (i+1,j)-gray.at (i-1,j)-gray.at (i,j+1)-gray.at (i,j-1)); laplace.at (i,j)=saturate_cast (gray.at (i+1,j)+gray.at (i-1,j)+gray.at (i,j+1)+gray.at (i,j-1)-4*gray.at (i,j)); } } imshow("dst",dst); imshow("laplace",laplace); waitKey(0); return0; }
除此之外,還有一些其他的拉普拉斯核:
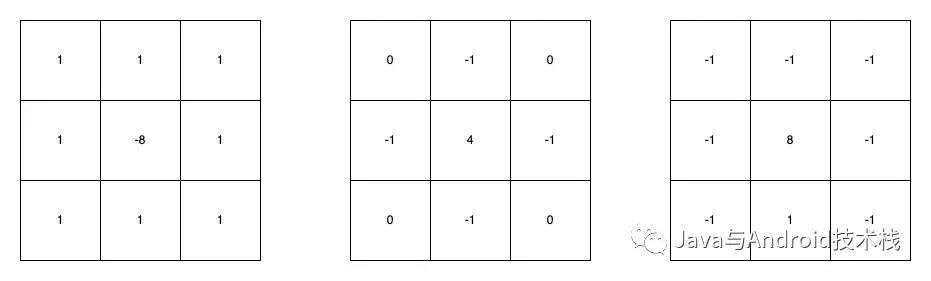 其他的拉普拉斯核.png
其他的拉普拉斯核.png
后續(xù)的文章會詳細(xì)介紹拉普拉斯相關(guān)的內(nèi)容,以及如何在 OpenCV 中如何使用相關(guān)的函數(shù),它的主要用途包括:
圖像銳化
邊緣檢測
模糊檢測
32.3 圖像的梯度及其性質(zhì)
梯度是一個有大小有方向的向量。梯度的方向是函數(shù)變化最快的方向。
圖像梯度是指圖像某個像素在 x 和 y 兩個方向上的變化率(與相鄰像素比較),它是一個二維向量,由 X 軸的變化、Y 軸的變化這2個分量組成。
向量的幅度(長度)
幅度由 M(x,y) 表示,根據(jù)歐幾里得范數(shù)(L2 范數(shù))可得:
其中, M(x,y) 是與原圖像大小相同的圖像,它是 x 和 y 在 f 的所有像素位置上變化時產(chǎn)生的,也被稱為梯度圖像。
求梯度的幅度時,由于公式(8)的計算量比較大,可以用 L1 范數(shù)來近似梯度的幅度:
梯度的方向角
經(jīng)典的圖像梯度算法是考慮圖像的每個像素的某個鄰域內(nèi)的灰度變化,利用邊緣臨近的一階或二階導(dǎo)數(shù)變化規(guī)律,對原始圖像中像素某個鄰域設(shè)置梯度算子(例如 Sobel 算子、Roberts 算子、Robinson 算子、Laplace 算子等等),通過圖像卷積實(shí)現(xiàn)對圖像兩個方向上梯度的計算。
Part33. 總結(jié)
本文介紹了圖像邊緣的含義,通過圖像邊緣引出圖像的梯度的概念。用數(shù)學(xué)的方式推導(dǎo)出圖像梯度并介紹了其相關(guān)的性質(zhì)。梯度是一個基礎(chǔ)且重要的概念,遍布機(jī)器學(xué)習(xí)、深度學(xué)習(xí)的領(lǐng)域。
介紹它們是為了后續(xù)介紹各種圖像邊緣檢測算法做準(zhǔn)備的,畢竟邊緣檢測是傳統(tǒng)的圖像分割算法。
審核編輯:湯梓紅
-
檢測算法
+關(guān)注
關(guān)注
0文章
118瀏覽量
25189 -
OpenCV
+關(guān)注
關(guān)注
29文章
622瀏覽量
41091 -
圖像邊緣檢測
+關(guān)注
關(guān)注
0文章
7瀏覽量
6537
原文標(biāo)題:OpenCV 筆記(8):圖像的邊緣和梯度
文章出處:【微信號:CVSCHOOL,微信公眾號:OpenCV學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
基于FPGA的實(shí)時邊緣檢測系統(tǒng)設(shè)計,Sobel圖像邊緣檢測,F(xiàn)PGA圖像處理
基于Canny邊緣檢測算子的圖像檢索算法
如何利用FPGA實(shí)現(xiàn)Laplacian圖像邊緣檢測器的研究?
Labview圖像處理——邊緣檢測
基于FPGA的實(shí)時圖像邊緣檢測系統(tǒng)設(shè)計(附代碼)
基于FPGA的圖像邊緣檢測
紅外圖像的邊緣提取
基于SoPC的邊緣圖像連通區(qū)域標(biāo)記的算法

新模板的圖像邊緣提取方法

基于草地圖像邊緣檢測

利用邊緣檢查的尺寸檢查圖像傳感器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論