 STM32的看門狗原理和示例代碼
STM32的看門狗原理和示例代碼
看門狗基礎:
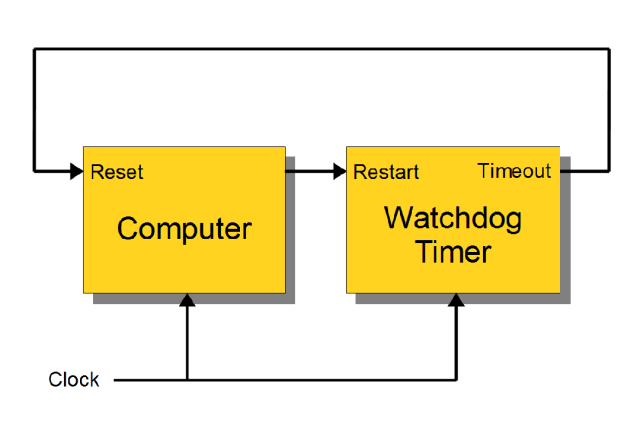
STM32微控制器上的看門狗主要有兩種類型:獨立看門狗(IWDG)和窗口看門狗(WWDG),這兩者都是用于監控系統運行狀態的機制,但它們在實現和應用上有一些區別:獨立看門狗(IWDG):
IWDG是一個定時器,其計數器在啟用后開始遞增。在程序中,你需要定期喂狗(通過向IWDG的寄存器寫入特定的值),以防止看門狗超時。否則,如果超過了預定的時間,系統將被認為是失效的,IWDG將生成復位信號,導致系統重啟。
窗口看門狗(WWDG):
WWDG是一種更靈活的看門狗類型,允許設置時間窗口。WWDG的計數器在啟用后開始遞增,但與IWDG不同,WWDG的計數器可以在一個特定的窗口內進行喂狗。這個時間窗口由上限和下限值確定。如果在窗口內喂狗,系統被認為是正常的。如果超出窗口或在窗口內未喂狗,WWDG將生成復位信號,導致系統重啟。
在STM32微控制器中,啟動看門狗有幾種方式,具體取決于使用的是獨立看門狗(IWDG)還是窗口看門狗(WWDG)。
啟動獨立看門狗(IWDG)的方式:
通過寫入寄存器:配置IWDG的預分頻器和重裝載寄存器,并在啟用IWDG后,定期寫入IWDG_KR中的特定值(例如0xAAAA),以喂狗。
HAL_IWDG_Refresh(&hiwdg); // 喂狗
通過STM32CubeMX和HAL庫:在CubeMX中啟用IWDG并生成代碼,HAL庫提供了相應的API來初始化和刷新IWDG。
啟動窗口看門狗(WWDG)的方式:
通過寫入寄存器:配置WWDG的計數器窗口上下限值,使能WWDG,并在程序中定期寫入WWDG_CR中的特定值(例如0x7F),以喂狗。
HAL_WWDG_Refresh(&hwwdg); // 喂狗
看門狗相關寄存器:
在STM32微控制器中,看門狗(IWDG和WWDG)的控制和配置主要通過特定的寄存器完成。以下是關鍵的看門狗寄存器:
獨立看門狗寄存器(IWDG):
IWDG_KR(0x40003000+0x00):寫入特定的值(0xCCCC)來啟動或重新加載獨立看門狗。
IWDG_PR(0x40003000 + 0x04):
預分頻器寄存器,用于設置IWDG的時鐘源的分頻系數。
IWDG_RLR(0x40003000 + 0x08):重裝載寄存器,用于設置IWDG的超時值。當IWDG倒計數到0時,會生成復位信號。
IWDG_SR(0x40003000 + 0x0C):狀態寄存器,用于指示IWDG的狀態,如是否在運行。
窗口看門狗(WWDG):
WWDG_CR(0x40002C00 + 0x00):控制寄存器,包含使能WWDG的位和計數器窗口值的設置。WWDG_CFR(0x40002C00 + 0x04):配置寄存器,包含WWDG的分頻系數和計數器窗口的設置。WWDG_SR(0x40002C00 + 0x08):狀態寄存器,用于指示WWDG的狀態,如是否在運行。
WWDG_CR (0x40002C00 + 0x0C):窗口寄存器,用于設置WWDG的計數器窗口值。
看門狗寄存器代碼:
#include "stm32f4xx.h"void IWDG_Configuration(void);void Delay(__IO uint32_t nCount);int main(void){ IWDG_Configuration(); while (1) { // 定期喂狗 IWDG->KR = 0xAAAA; // 你的主要代碼 // ... // 延時,模擬主循環的執行時間 Delay(500000); }}void IWDG_Configuration(void){ // 使能IWDG時鐘 RCC->APB1ENR |= RCC_APB1ENR_IWDGEN; // 設置IWDG的時鐘源為LSI(低速內部時鐘) RCC->CSR |= RCC_CSR_LSION; while ((RCC->CSR & RCC_CSR_LSIRDY) == 0); // 配置IWDG的預分頻器和重裝載寄存器 IWDG->KR = 0x5555; // 使能對IWDG_PR和IWDG_RLR寄存器的寫操作 IWDG->PR = IWDG_PRESCALER_256; // 預分頻器,配置IWDG的時鐘 IWDG->RLR = 4095; // 超時時間,根據需求調整 // 啟動獨立看門狗 IWDG->KR = 0xCCCC;}void Delay(__IO uint32_t nCount){ while(nCount--) { }}
看門狗HAL庫代碼:
#include "main.h"#include "stm32f4xx_hal.h"IWDG_HandleTypeDef hiwdg;void SystemClock_Config(void);static void MX_GPIO_Init(void);static void MX_IWDG_Init(void);int main(void){ HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_IWDG_Init(); while (1) { // 定期喂狗 HAL_IWDG_Refresh(&hiwdg); // 你的主要代碼 }}void SystemClock_Config(void){ RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; __HAL_RCC_PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI; RCC_OscInitStruct.PLL.PLLM = 8; RCC_OscInitStruct.PLL.PLLN = 160; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 4; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) { Error_Handler(); }}void MX_IWDG_Init(void){ hiwdg.Instance = IWDG; hiwdg.Init.Prescaler = IWDG_PRESCALER_256; hiwdg.Init.Reload = 4095; if (HAL_IWDG_Init(&hiwdg) != HAL_OK) { Error_Handler(); }}void Error_Handler(void){ while (1) { // 處理錯誤 }}#ifdef USE_FULL_ASSERTvoid assert_failed(uint8_t *file, uint32_t line){ while (1) { // 處理斷言失敗的情況 }}#endif
-
微控制器
+關注
關注
48文章
7496瀏覽量
151085 -
看門狗
+關注
關注
10文章
559瀏覽量
70754 -
STM32
+關注
關注
2266文章
10876瀏覽量
354926
發布評論請先 登錄
相關推薦
看門狗定時器的工作原理
單片機開發:使用內部看門狗定時器(WDT)還是外掛看門狗芯片?

【GD32F470紫藤派開發板使用手冊】第七講 FWDG-看門狗實驗
【GD32H757Z海棠派開發板使用手冊】第七講 FWDG-看門狗實驗
軟件看門狗和硬件看門狗的區別
TLF35584中集成的看門狗工作應用案例

求助,關于看門狗定時器的喂狗時間和多APP看門狗的問題求解
什么是看門狗?如何實現對系統程序的監控?
TLEz9855如何關閉看門狗?
芯知識 | 語音芯片中的聲音播放提示IC內置看門狗的作用介紹
MCU看門狗應用注意事項






 工商網監
工商網監
評論