") 服務(wù)通信接口的定義與使用
服務(wù)通信接口的定義與使用
了解了通信接口的概念,接下來我們再從代碼實現(xiàn)的角度,研究下如何定義以及使用一個接口。
在之前服務(wù)概念講解的課程中,我們編寫了這樣一個例程,我們再來回顧下。

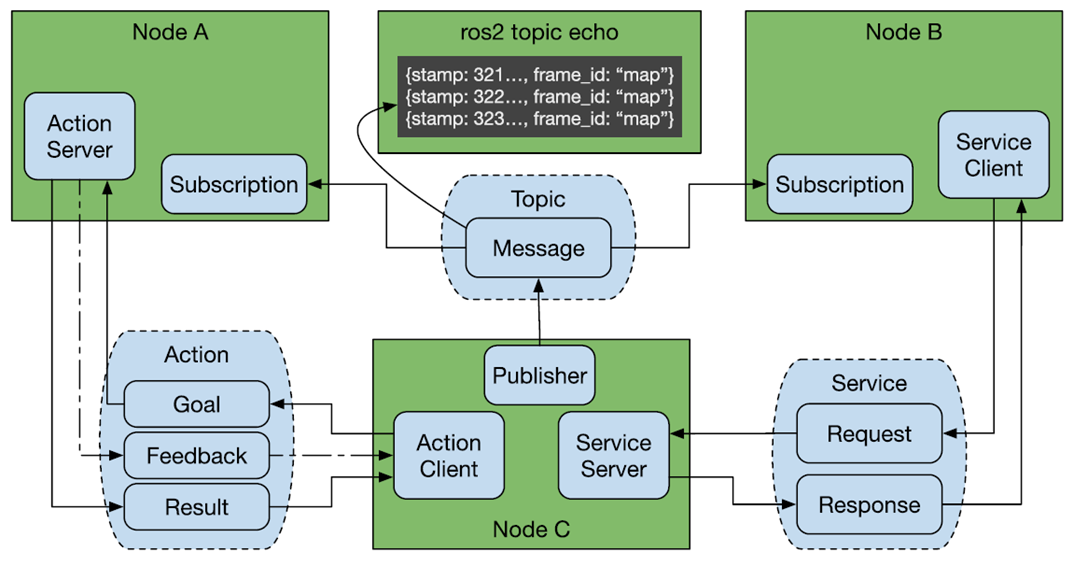
有三個節(jié)點:
第一個驅(qū)動相機發(fā)布圖像話題;
第二個是機器視覺識別節(jié)點,封裝了一個服務(wù)的服務(wù)端對象,提供目標識別位置的查詢服務(wù);
第三個節(jié)點在需要目標位置的時候,就可以發(fā)送請求,收到位置進行使用了。

接口定義
在這個例程中,我們使用GetObjectPosition.srv定義了服務(wù)通信的接口:
learning_interface/srv/GetObjectPosition.srv
bool get # 獲取目標位置的指令---int32 x # 目標的X坐標int32 y # 目標的Y坐標
定義中有兩個部分,上邊是獲取目標位置的指令,get為true的話,就表示我們需要一次位置,服務(wù)端就會反饋這個x、y坐標了。
完成定義后,還需要在功能包的CMakeLists.txt中配置編譯選項,讓編譯器在編譯過程中,根據(jù)接口定義,自動生成不同語言的代碼:
...find_package(rosidl_default_generators REQUIRED)rosidl_generate_interfaces(${PROJECT_NAME} "srv/GetObjectPosition.srv")...
功能包的package.xml文件中也需要添加代碼生成的功能依賴:
... < build_depend >rosidl_default_generators< /build_depend > < exec_depend >rosidl_default_runtime< /exec_depend > < member_of_group >rosidl_interface_packages< /member_of_group > ...
程序調(diào)用
我們在代碼中再來重點看下接口的使用方法。
客戶端接口調(diào)用
learning_service/service_object_client.py
#!/usr/bin/env python3# -*- coding: utf-8 -*-"""@作者: 古月居@說明: ROS2服務(wù)示例-請求目標識別,等待目標位置應(yīng)答"""import rclpy # ROS2 Python接口庫from rclpy.node import Node # ROS2 節(jié)點類from learning_interface.srv import GetObjectPosition # 自定義的服務(wù)接口class objectClient(Node): def __init__(self, name): super().__init__(name) # ROS2節(jié)點父類初始化 self.client = self.create_client(GetObjectPosition, 'get_target_position') while not self.client.wait_for_service(timeout_sec=1.0): self.get_logger().info('service not available, waiting again...') self.request = GetObjectPosition.Request() def send_request(self): self.request.get = True self.future = self.client.call_async(self.request)def main(args=None): rclpy.init(args=args) # ROS2 Python接口初始化 node = objectClient("service_object_client") # 創(chuàng)建ROS2節(jié)點對象并進行初始化 node.send_request() while rclpy.ok(): rclpy.spin_once(node) if node.future.done(): try: response = node.future.result() except Exception as e: node.get_logger().info( 'Service call failed %r' % (e,)) else: node.get_logger().info( 'Result of object position:n x: %d y: %d' % (response.x, response.y)) break node.destroy_node() # 銷毀節(jié)點對象 rclpy.shutdown() # 關(guān)閉ROS2 Python接口
服務(wù)端接口調(diào)用
learning_service/service_object_server.py
#!/usr/bin/env python3# -*- coding: utf-8 -*-"""@作者: 古月居(www.guyuehome.
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
通信接口
+關(guān)注
關(guān)注
3文章
234瀏覽量
30963 -
服務(wù)端
+關(guān)注
關(guān)注
0文章
66瀏覽量
6987 -
ROS
+關(guān)注
關(guān)注
1文章
276瀏覽量
16966
發(fā)布評論請先 登錄
相關(guān)推薦
MIDI接口定義,MIDI接口游戲桿接口引腳功能定義圖
MIDI接口信號定義與游戲桿接口功能定義
MIDI接口和PC游戲桿接口是共用的,外觀見下圖:
發(fā)表于 05-03 23:27
?6780次閱讀
SCART接口功能定義
SCART接口功能定義
附錄:SCART 接口功能定義A、傳輸復(fù)合視頻信號(Composite Video Only):
發(fā)表于 08-21 22:40
?7487次閱讀
接口的定義 通信接口的作用
通信接口 在ROS系統(tǒng)中,無論話題還是服務(wù),或者我們后續(xù)將要學習的動作,都會用到一個重要的概念——通信接口。
ROS通信接口機制介紹
ROS通信接口 接口可以讓程序之間的依賴降低,便于我們使用別人的代碼,也方便別人使用我們的代碼,這就是ROS的核心目標,減少重復(fù)造輪子。 ROS有三種常用的通信機制,分別是話題、
話題通信接口的定義和運行效果
話題接口的定義與使用 話題通信接口的定義也是類似的,繼續(xù)從之前的機器視覺案例中來衍生,我們想把服務(wù)

fpga仿真器接口定義
FPGA(Field-Programmable Gate Array,現(xiàn)場可編程門陣列)仿真器接口的定義主要依賴于仿真器的具體設(shè)計和所支持的通信協(xié)議。在FPGA的設(shè)計和仿真過程中,接口
SIM卡座的接口定義
SIM卡座連接器的接口定義是移動通信設(shè)備中不可或缺的一部分,確保了SIM卡與設(shè)備之間的穩(wěn)定通信和數(shù)據(jù)傳輸。在本文中,連欣科技將詳細探討一下SIM卡座的





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論