") TogetherROS系統(tǒng)更新和CPU調(diào)頻策略配置
TogetherROS系統(tǒng)更新和CPU調(diào)頻策略配置
系統(tǒng)更新
第二個配置,是更新當(dāng)前旭日X3派所使用的Ubuntu鏡像,和在電腦上使用的命令相同。
我們更新一下當(dāng)前的系統(tǒng)鏡像:
$ sudo apt update #會按照當(dāng)前軟件源的域名設(shè)置去連接遠(yuǎn)程軟件源
$ sudo apt full-upgrade #升級所有可以升級的軟件包
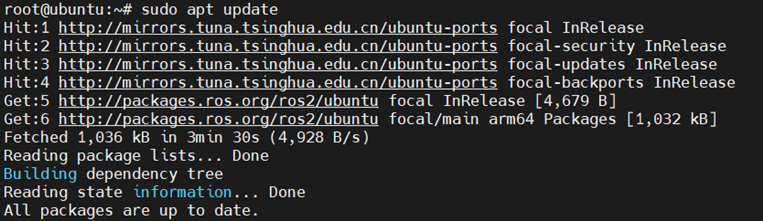
彈出如下對話,我們選擇“Y”,回車;

這樣我們就完成了對系統(tǒng)更新的檢查,并安裝好了更新包。
CPU調(diào)頻策略
第三個配置,設(shè)置CPU的調(diào)頻策略,這是一個可選項,大家了解之后,在未來需要使用的時候進(jìn)行配置即可。
動態(tài)調(diào)頻 $ echo > ondemand /sys/devices/system/cpu/cpufreq/policy0/scaling_governor #讓系統(tǒng)根據(jù)當(dāng)前負(fù)載,動態(tài)調(diào)整CPU頻率
滿頻模式 $ echo > performance /sys/devices/system/cpu/cpufreq/policy0/scaling_governor #讓CPU始終以滿頻,也就1.2GHz的頻率工作
打開超頻 $ echo 1 > /sys/devices/system/cpu/cpufreq/boost #使CPU以超頻,也就是1.5GHz的頻率工作
關(guān)閉超頻 $ echo 0 > /sys/devices/system/cpu/cpufreq/boost
這里CPU頻率為,滿頻模式:1.2GHz,超頻模式:1.5GHz。

大家需要注意,默認(rèn)的系統(tǒng)配置是關(guān)閉超頻、并且動態(tài)調(diào)頻的配置。這樣可以比較好地保證功率最優(yōu)。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關(guān)注
關(guān)注
210文章
28231瀏覽量
206615 -
cpu
+關(guān)注
關(guān)注
68文章
10829瀏覽量
211194 -
Ubuntu
+關(guān)注
關(guān)注
5文章
560瀏覽量
29588 -
ROS
+關(guān)注
關(guān)注
1文章
276瀏覽量
16967
發(fā)布評論請先 登錄
相關(guān)推薦
Cyclone IV器件的配置和遠(yuǎn)程系統(tǒng)更新
本章節(jié)介紹了 Cyclone? IV 器件的配置和遠(yuǎn)程系統(tǒng)更新。Cyclone IV (Cyclone IV GX和 Cyclone IV E)器件使用 SRAM 單元存儲配置數(shù)據(jù)。由
發(fā)表于 11-14 10:13
HCI連接更新和加密程序
你好,我正在評估HCI模式下的CY5676A進(jìn)程256KB模塊。我試圖從同一個設(shè)備同時發(fā)送兩個控制程序;連接更新和加密;該設(shè)備處理連接更新命令并發(fā)送請求LLyCalnFutsUpDATE.IN,在到
發(fā)表于 10-24 16:40
BIOS更新和較舊的四核處理器是否存在兼容性問題?
我剛剛從英特爾驅(qū)動程序部分的更新中更新了我的BIOS。更新后,我的處理器在BIOS屏幕空閑時加熱到97C。完全運行計算機的唯一方法是禁用所有增強選項,僅在1核上運行,并將CPU風(fēng)扇設(shè)置
發(fā)表于 11-05 11:20
RK3288系統(tǒng)CPU的頻率調(diào)節(jié)策略是什么
RK3288系統(tǒng)CPU的頻率調(diào)節(jié)策略是什么?怎樣去修改RK3288系統(tǒng)CPU的頻率調(diào)節(jié)策略呢?
發(fā)表于 03-10 07:35
【米爾MYD-J1028X開發(fā)板試用體驗】體驗米爾MYD-J1028X開發(fā)板 NXP LS1028A處理器 CPU調(diào)頻策略
系統(tǒng):查看MYC-J1028X開發(fā)板設(shè)置CPU調(diào)頻策略指令:root@forlinx:/# cat /sys/devices/system/cpu
發(fā)表于 10-07 18:47
嵌入式學(xué)習(xí)板-ElfBoard ELF 1 固定CPU頻率的方法
圖形化界面配置Linux內(nèi)核的CPU調(diào)頻策略:
需要先執(zhí)行“make imx6ull_elf1_defconfig”命令生成.config,然后再使用圖形界面進(jìn)行
發(fā)表于 10-25 09:47
雙饋風(fēng)電機組一次調(diào)頻策略
針對雙饋風(fēng)電機組( DFIGs)不具備調(diào)頻控制能力的問題,設(shè)計DFIG -次調(diào)頻控制策略,實現(xiàn)了DFIG參與電網(wǎng)一次調(diào)頻。研究DFIG功率控制原理和頻率響應(yīng)過程,并考慮虛擬慣量、頻率下
發(fā)表于 12-28 15:35
?2次下載
使用DRaaS測試操作系統(tǒng)更新和新代碼版本
幾乎每個數(shù)據(jù)中心都需要測試操作系統(tǒng)更新和新代碼版本。采用DRaaS解決方案就可以滿足需求。問題是這些測試需求需要一個正在測試的服務(wù)器的副本以及最新的數(shù)據(jù)副本。
linux CPU是這樣動態(tài)調(diào)頻
針對sep4020的linux低功耗研究也有一段時間了,基本把低功耗的實現(xiàn)方式想清楚了(主要分成機制和策略),這段時間的工作主要在機制上。暫時想實現(xiàn)的主要的機制有:cpu級,設(shè)備驅(qū)動級,系統(tǒng)平臺級。管理顆粒度不斷遞增,形成三駕馬
發(fā)表于 04-22 17:26
?1613次閱讀

如何實現(xiàn)遠(yuǎn)程FPGA的更新和重啟
如今, 大多數(shù)通訊系統(tǒng)均將FPGA作為其產(chǎn)品解決方案, 且已有大量FPGA應(yīng)用到通訊系統(tǒng)之中。為了達(dá)到降低系統(tǒng)維護(hù)的成本的目的,我們就需要實現(xiàn)FPGA遠(yuǎn)程更新重啟
發(fā)表于 07-10 16:01
?21次下載
火力發(fā)電廠一次調(diào)頻閉環(huán)控制策略研究與應(yīng)用
大型火力發(fā)電廠一次調(diào)頻性能的優(yōu)良對維持電網(wǎng)穩(wěn)定運行具有關(guān)鍵作用。目前,大型火力發(fā)電廠一次調(diào)頻采用的是頻率差函數(shù)發(fā)生器開環(huán)控制策略,這種控制策略方式構(gòu)造簡單、反應(yīng)速度快,但是無法準(zhǔn)確控制
TogetherROS Bot相機驅(qū)動方法
TogetherROS?·Bot相機驅(qū)動 除此之外,TogetherROS?·Bot中也提供了USB攝像頭的驅(qū)動節(jié)點,連接攝像頭之后,直接設(shè)置設(shè)備的權(quán)限和TogetherROS的環(huán)境變量就可以使用了
TogetherROS系統(tǒng)的通信功能測試
通信測試 先來測試一下TogetherROS?·Bot系統(tǒng)的通信功能。 我們需要啟動兩個終端,分別連接到旭日X3派上,并分別按以下命令配置環(huán)境變量。 終端1: ** source /opt/tros
TogetherROS系統(tǒng)中如何配置網(wǎng)絡(luò)連接
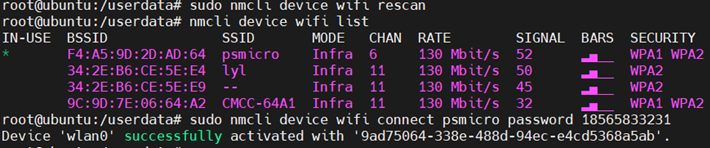
無論是旭日X3派,還是TogetherROS,在正式使用之前,都還需要進(jìn)行一些必要的配置,完善必要的功能模塊,提供完整的算力支持,達(dá)到最佳狀態(tài)。 網(wǎng)絡(luò)連接 第一個配置,是無線網(wǎng)絡(luò)連接。 當(dāng)然,大家也





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論