") 如何驗(yàn)證ROS是否安裝成功 ubuntu20.04教程
如何驗(yàn)證ROS是否安裝成功 ubuntu20.04教程
驗(yàn)證ROS是否安裝成功
按正常來(lái)說(shuō)ROS到這里就安裝完成了,現(xiàn)在我們來(lái)驗(yàn)證一下,輸入以下命令:
roscore
如果出現(xiàn)了以下的問(wèn)題:Command ‘roscore’ not found, but can be installed with:sudo apt install python3-roslaunch,按照提示輸入sudo apt install python3-roslaunch命令并執(zhí)行,成功后界面如下:
如果出現(xiàn)了以下的問(wèn)題說(shuō)明,之前的安裝沒(méi)有安裝全
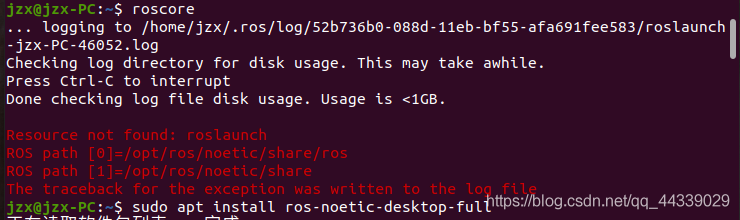
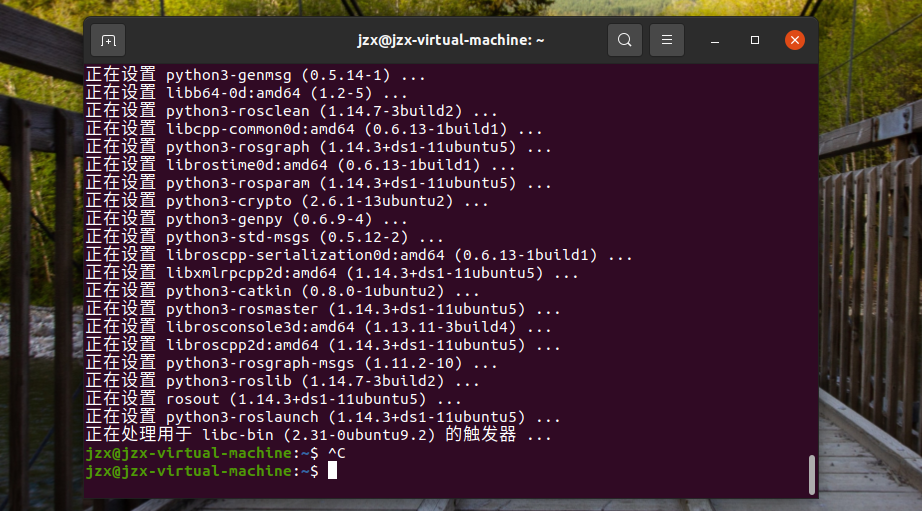
輸入以下命令,把沒(méi)安裝的安裝一下就好了(如果顯示有幾個(gè)安裝包無(wú)法下載,是因?yàn)?a target="_blank">網(wǎng)絡(luò)的原因重新輸入以下命令就行了)
sudo apt install ros-noetic-desktop-full
如果出現(xiàn)了以下的問(wèn)題:

可嘗試輸入以下命令:
source /opt/ros/noetic/setup.bash
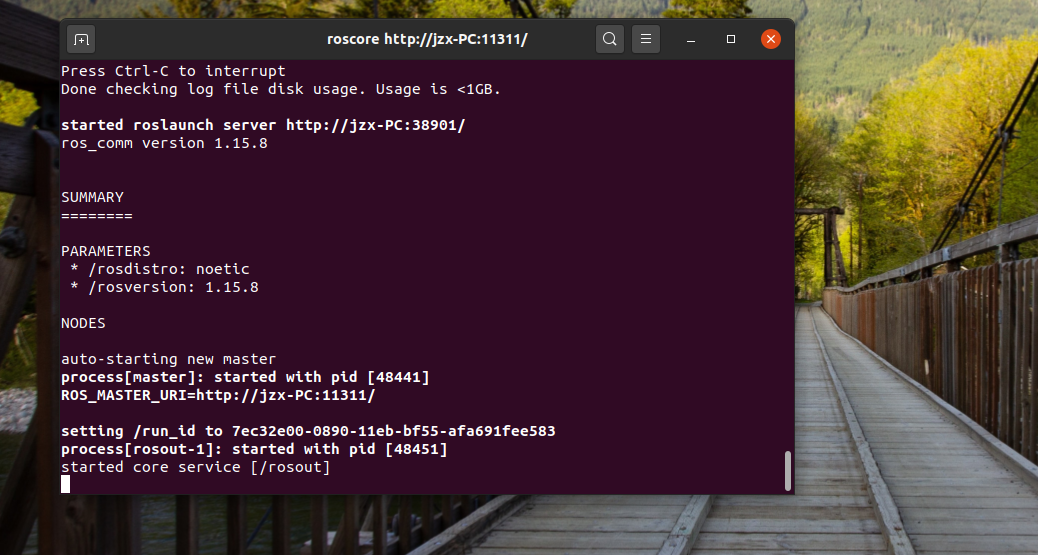
到這里再輸入roscore看一下,若安裝成功會(huì)顯示如下界面:
然后我們啟動(dòng)一下小海龜?shù)?a href="http://www.nxhydt.com/tags/仿真器/" target="_blank">仿真器試一試,按ctrl+alt+t打開(kāi)一個(gè)新的終端,輸入以下命令:
rosrun turtlesim turtlesim_node
按ctrl+alt+t再打開(kāi)一個(gè)新的終端,輸入以下命令:
rosrun turtlesim turtle_teleop_key
這時(shí)候你按鍵盤(pán)上的↑↓←→鍵就可以控制小海龜移動(dòng)了,那么恭喜你的ROS已經(jīng)成功安裝完了。
-
命令
+關(guān)注
關(guān)注
5文章
678瀏覽量
21987 -
Ubuntu
+關(guān)注
關(guān)注
5文章
560瀏覽量
29572 -
ROS
+關(guān)注
關(guān)注
1文章
276瀏覽量
16967
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
怎樣利用Ubuntu20.04去安裝Mentor Calibre 2020?
如何搭建交叉編譯環(huán)境?如何驗(yàn)證是否安裝成功?
【ROC-RK3568-PC開(kāi)發(fā)板試用體驗(yàn)】Ubuntu20.04桌面系統(tǒng)體驗(yàn)升級(jí)與GCC安裝
RK3588S-PC的ubuntu20.04系統(tǒng)上運(yùn)行ros報(bào)錯(cuò)
在Ubuntu20.04系統(tǒng)中,如何將Vivado編輯器配置成Vim?
Ubuntu20.04系統(tǒng)中使用用STM32F2107RCT6點(diǎn)亮一個(gè)二極管燈

如何制作ubuntu20.04的文件系統(tǒng)
【ROC-RK3568-PC開(kāi)發(fā)板試用體驗(yàn)】Ubuntu20.04桌面系統(tǒng)體驗(yàn)升級(jí)與GCC安裝
【ROC-RK3568-PC開(kāi)發(fā)板試用體驗(yàn)】燒錄Ubuntu20.04系統(tǒng)

ubuntu20.04安裝教程
如何在ubuntu20.04中添加和更新ROS軟件源
ubuntu20.04設(shè)置環(huán)境變量方法
Ubuntu 20.04如何更改用戶名

【北京迅為】iTOP-LS2K0500開(kāi)發(fā)板快速使用編譯環(huán)境ubuntu20.04第一章加載迅為提供 Ubuntu20.04





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論