") 簡單認識伺服系統(tǒng)
簡單認識伺服系統(tǒng)
來源:書香半島
伺服系統(tǒng)(servomechanism)又稱隨動系統(tǒng),是用來精確地跟隨或復現(xiàn)某個過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統(tǒng)。它的主要任務是按控制命令的要求、對功率進行放大、變換與調(diào)控等處理,使驅(qū)動裝置輸出的力矩、速度和位置控制非常靈活方便。在自動化領(lǐng)域很多情況下,伺服系統(tǒng)專指被控制量(系統(tǒng)的輸出量)是機械位移或位移速度、加速度的反饋控制系統(tǒng),其作用是使輸出的機械位移(或轉(zhuǎn)角)準確地跟蹤輸入的位移(或轉(zhuǎn)角),其結(jié)構(gòu)組成和其他形式的反饋控制系統(tǒng)沒有原則上的區(qū)別。
伺服在自動化半導體設(shè)備中的應用極其廣泛,例如在涂膠機,***等設(shè)備上均有。
伺服驅(qū)動系統(tǒng)(ServoSystem)簡稱伺服系統(tǒng),是一種以機械位置或角度作為控制對象的自動控制系統(tǒng),例如數(shù)控機床等。使用在伺服系統(tǒng)中的驅(qū)動電機要求具有響應速度快、定位準確、轉(zhuǎn)動慣量(使用在機電系統(tǒng)中的伺服電機的轉(zhuǎn)動慣量較大,為了能夠和絲杠等機械部件直接相連。伺服電機有一種專門的小慣量電機,為了得到極高的響應速度。但這類電機的過載能力低,當使用在進給伺服系統(tǒng)中時,必須加減速裝置。轉(zhuǎn)動慣量反映了系統(tǒng)的加速度特性,在選擇伺服電機時,系統(tǒng)的轉(zhuǎn)動慣量不能大于電機轉(zhuǎn)動慣量的3倍。)較大等特點,這類專用的電機稱為伺服電機。當然,其基本工作原理和普通的交直流電機沒有什么不同。該類電機的專用驅(qū)動單元稱為伺服驅(qū)動單元,有時簡稱為伺服,一般其內(nèi)部包括電流、速度和/或位置閉環(huán)。
伺服(Servo)是一個性能上的名詞,一般只要主令和控制結(jié)果的近似達到了一定高的程度就能稱為伺服,這和機器的結(jié)構(gòu)沒有直接的關(guān)系。例如伺服系統(tǒng)都沒有精確的慣量匹配的范圍,這是因為慣量匹配的結(jié)果只要不影響控制對象對主令跟隨或影響不大就好了,跟具體是3還是3.5沒有關(guān)系。伺服系統(tǒng)也不一定是電機系統(tǒng),有的氣動系統(tǒng)就稱為氣動伺服。
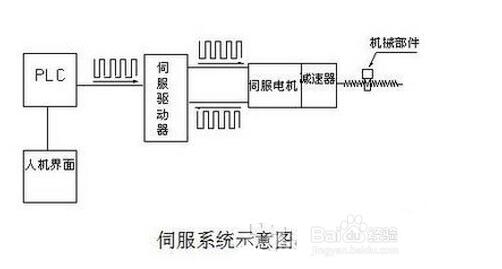
伺服系統(tǒng)由伺服電機、伺服驅(qū)動器、指令機構(gòu)三大部分構(gòu)成,伺服電機是執(zhí)行機構(gòu),就是靠它來實現(xiàn)運動的,伺服驅(qū)動器是伺服電機的功率電源,指令機構(gòu)是發(fā)脈沖或者給速度伺服驅(qū)動器的,常用的驅(qū)動元件有IPM模塊。上位機:給伺服指令,如PLC、工控機、數(shù)控系統(tǒng)等;伺服放大器:接收并處理上位機的指令,控制電機轉(zhuǎn)動角度和速度;伺服電機:執(zhí)行機構(gòu),其自帶的編碼器把電機旋轉(zhuǎn)的角度和速度反饋給伺服放大器,構(gòu)成閉環(huán),確保精度!
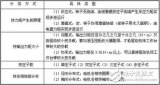
1、控制器通常是計算機或PID控制電路,主要任務是對比較元件輸出的偏差信號進行變換處理,控制執(zhí)行元件按要求動作。
2、執(zhí)行環(huán)節(jié),其作用是按控制信號的要求,將輸入的各種形式的能量轉(zhuǎn)化成機械能,驅(qū)動被控對象工作,機電一體化系統(tǒng)中的執(zhí)行元件一般指各種電機或液壓,氣動伺服機構(gòu)等。
3、被控對象,機械參數(shù)量包括位移、速度、加速度、力和力矩為被控對象。
4、比較環(huán)節(jié)是將輸入的指令信號與系統(tǒng)的反饋信號進行比較,以獲得輸出與輸入間的偏差信號的環(huán)節(jié),通常由專門的電路或計算機來實現(xiàn)。
5、檢測環(huán)節(jié),能夠?qū)敵鲞M行測量并轉(zhuǎn)換成比較環(huán)節(jié)所需要的量綱的裝置,一般包括傳感器和轉(zhuǎn)換電路。
伺服系統(tǒng)本質(zhì)上是一種隨動系統(tǒng)。只不過被控量是位移或是其對時間的導數(shù)。如果要問什么是隨動系統(tǒng),就是一個系統(tǒng)的輸出盡可能以最快,最精確的方式復現(xiàn)輸入信號。其衡量的指標有超調(diào)量、延遲。下面就關(guān)于伺服電機的相關(guān)問題作出了整理,希望在今后的工作中能帶來幫助.
1.伺服電機為什么不會丟步?
伺服電機驅(qū)動器接收電機編碼器的反饋信號,并和指令脈沖進行比較,從而構(gòu)成了一個位置的半閉環(huán)控制。所以伺服電機不會出現(xiàn)丟步現(xiàn)象,每一個指令脈沖都可以得到可靠響應。
2.對伺服電機進行機械安裝時,應特別注意什么?
由于每臺伺服電機后端部都安裝有旋轉(zhuǎn)編碼器,它是一個十分易碎的精密光學器件,過大的沖擊力肯定會使其損壞。
3.如何調(diào)節(jié)伺服電機,調(diào)節(jié)伺服電機有幾種方式?
使用泰科智能圖像化軟件對電機的PID參數(shù)、電機參數(shù)、電子齒輪比等進行調(diào)節(jié)。
4.我們想用伺服電機替換產(chǎn)品中的步進電機,應注意哪些問題?
A.為了保證控制系統(tǒng)改變不大,應選用數(shù)字式伺服系統(tǒng),仍可采用原來的脈沖控制方式;
B.由于伺服電機都有一定過載能力,所以在選擇伺服電機時,經(jīng)驗上可以按照所使用的步進電機輸出扭矩的1/3來參考確定伺服電機的額定扭矩;
C.伺服電機的額定轉(zhuǎn)速比步進電機的轉(zhuǎn)速要高的多,為了充分發(fā)揮伺服電機的性能,最好增加減速裝置,讓伺服電機工作在接近額定轉(zhuǎn)速下,這樣也可以選擇功率更小的電機,以降低成本。
5.用脈沖方式控制伺服電機的優(yōu)點?
一可靠性高,不易發(fā)生飛車事故。用模擬電壓方式控制伺服電機時,如果出現(xiàn)接線接錯或使用中元件損壞等問題時,有可能使控制電壓升至正的最大值。這種情況是很危險的。如果用脈沖作為控制信號就不會出現(xiàn)這種問題。
二 信號抗干擾性能好。數(shù)字電路抗干擾性能是模擬電路難以比擬的。
當然目前由于伺服驅(qū)動器和運動控制器的限制,用脈沖方式控制伺服電機也有一些性能方面的弱點。一是伺服驅(qū)動器的脈沖工作方式脫離不了位置工作方式,二是運動控制器和驅(qū)動器如何用足夠高的脈沖信號傳遞信息。
這兩個根本的弱點使脈沖控制伺服電機有很大限制。
(1)控制的靈活性大大下降。
這是因為伺服驅(qū)動器工作在位置方式下,位置環(huán)在伺服驅(qū)動器內(nèi)部。這樣系統(tǒng)的PID參數(shù)修改起來很不方便。當用戶要求比較高的控制性能時實現(xiàn)起來會很困難。從控制的角度來看,這只是一種很低級的控制策略。如果控制程序不利用編碼器反饋信號,事實上成了一種開環(huán)控制。如果利用反饋控制,整個系統(tǒng)存在兩個位置環(huán),控制器很難設(shè)計。在實際中,常常不用反饋控制,但不定時的讀取反饋進行參考。這樣的一個開環(huán)系統(tǒng),如果運動控制器和伺服驅(qū)動器之間的信號通道上產(chǎn)生干擾,系統(tǒng)是不能克服的。
(2)控制的快速性速度不高。
6.伺服電機通電以前應做哪些檢查工作?
檢查電機與驅(qū)動器的連線,連線不能虛連,線不能接錯。
7.控制伺服時,給信號時,伺服電機不轉(zhuǎn),振動?
U,V,W三相接錯。
8.如何根據(jù)客戶的要求為客戶選配伺服電機和減速機,所選的方案應為最佳。
根據(jù)功率選取減速機,選出合適的減速機尺寸,在根據(jù)減速機選擇合適的伺服電機,一定要注意速度的選取。
審核編輯:湯梓紅
-
控制器
+關(guān)注
關(guān)注
112文章
16198瀏覽量
177398 -
plc
+關(guān)注
關(guān)注
5008文章
13150瀏覽量
462052 -
電動機
+關(guān)注
關(guān)注
74文章
4089瀏覽量
96001 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
561瀏覽量
39179
原文標題:什么是伺服系統(tǒng)?伺服系統(tǒng)的組成和基礎(chǔ)知識問答
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
數(shù)控機床的伺服系統(tǒng)
進給伺服系統(tǒng)
伺服系統(tǒng)的PID控制
伺服系統(tǒng)介紹

伺服系統(tǒng)脈沖控制電路
步進電機開環(huán)伺服系統(tǒng)解析,開環(huán)步進伺服系統(tǒng)的工作原理
伺服系統(tǒng)是什么_伺服系統(tǒng)的基本要求_伺服系統(tǒng)的基本組成
伺服系統(tǒng)什么意思_伺服系統(tǒng)的作用是什么
伺服系統(tǒng)應用于哪兒_伺服系統(tǒng)應用實例
交流伺服系統(tǒng)的特點有哪些
交流伺服系統(tǒng)的分類及應用場合
機電伺服系統(tǒng)有哪些_機電伺服系統(tǒng)工作原理
伺服系統(tǒng)原理及分類

交流伺服系統(tǒng)的分類及應用場合





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論