 使用SaberRD對汽車轉向指示燈電路進行自動潛通路分析
使用SaberRD對汽車轉向指示燈電路進行自動潛通路分析
1. 介紹
潛通路是指電子電氣系統中意外存在的通路或邏輯流,它可以啟動不需要的功能或抑制需要的功能。其實這些是設計者無意地設計進系統的,它與硬件失效無關,而是一旦被激發,它就以非期望的行為出現。潛在通路的出現常常會給系統設備乃至人身造成巨大的危害。
現代車輛中,電氣系統所包含的電路數量多達數百個,因此在設計中,一個重要的環節就是確保將所有組件連接在一起的電線能夠安全地運行,以實現廣泛的條件下實現令人滿意的操作。
在本文提供的設計示例中,您可以使用SaberRD的故障工具對典型的汽車轉向指示燈電路進行自動潛通路分析。設計示例包括分析標稱條件和故障條件下的設計性能。
2. 汽車轉向燈電路的潛行路徑分析
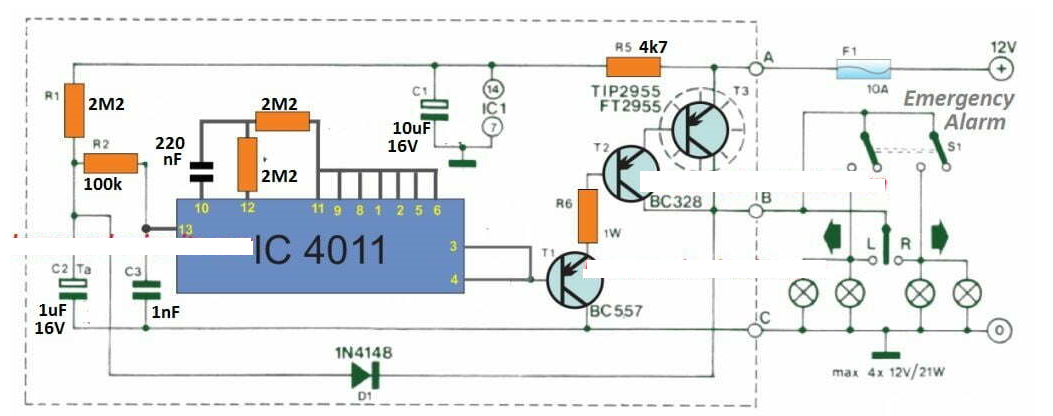
汽車轉向指示燈電路原理圖見下圖1:
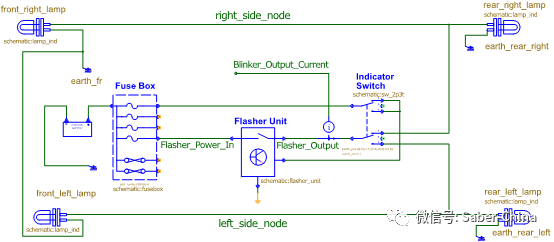
圖1 汽車轉向指示燈電路原理圖
每個組件后面都有一個仿真模型,用于捕捉每個組件的物理和電氣特性。接地點被建模為一個簡單的電阻值。轉向指示燈開關具有動態特性,可以在仿真過程中改變以打開左側或右側指示燈電路。來自轉向指示燈開關的轉向位置輸入進入閃光器單元。
閃光裝置由電池通過保險絲供電,并根據轉向開關位置通過指示燈開關觸點向適當的轉向指示燈(左或右)提供閃爍信號。燈模型模擬了冷啟動行為,這會在初始開啟時引起電流浪涌,而開啟時間由燈絲預熱決定。
2.1. 標稱操作
設計分析的第一步是仿真和測量設計的一組標稱值。
下載隨附的設計并在SaberRD 中打開sneak_path_example.ai_dsn。此設計示例包括用于自動化仿真和后處理的實驗。在“Simulate”選項卡下,請從下拉菜單中選擇“實驗”。這將打開一個額外的下拉菜單,您可以在其中選擇所需的實驗并自動運行模擬。要在標稱條件下分析設計,請使用實驗文件“Nominal_analysis”運行仿真,如下圖2所示。

圖2 標稱分析仿真設置
仿真運行11秒。轉向指示燈開關被編程為從t=1秒到t=5秒打開右側指示燈,從t=6秒到t=10秒打開左側指示燈。在分析中,通過/失敗測試標準添加到實驗中以檢查以下內容。
1)存在潛通路
2)過電流消耗
3)每個轉向指示燈的功能都符合預期
這些測試通過或失敗與否將由實驗內部的設定標準決定,而標準是基于在正常操作條件下針對此給定仿真設置和仿真時間在左節點、右節點、閃光燈輸出和每個轉向指示燈處測量的平均電壓和/或電流值得出的。
運行仿真后,您將可以訪問相應的實驗報告和“結果”部分中的繪圖信號,也可以通過雙擊打開它們。正常運行下應該可以看到如下實驗報告圖3和信號波形圖4。

圖3 標稱分析實驗報告
從實驗報告中可以觀察到所有的測試標準都通過了。

圖4 標稱分析波形圖
2.2. 潛通路分析
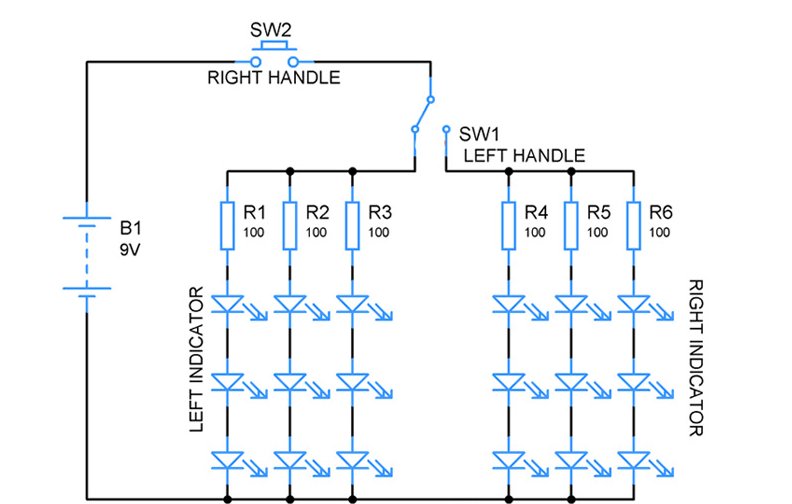
在汽車中,通常由許多接地螺栓將負載連接到汽車/卡車的車身,從而為負載提供接地。當接地連接因振動而嚴重生銹或完全脫落時,連接到該接地螺柱的負載可能會建立一條不需要的電路路徑,稱為通過其他一些接地螺柱的潛通路。我們可以使用SaberRD中的故障工具Fault自動模擬此類故障并分析其影響。
仿真模型明顯的優勢就是它可以“即時”重新編程。例如,任何接地點、連接器甚至電線的電阻值都可以在仿真過程中改變,并且可以觀察到對設計的影響。
在本設計示例中,左右前燈在一個接地點一起接地。如果該點出現故障或變為高電阻,則燈可以通過后指示燈找到替代接地路徑。這種所謂的“潛通路”在車輛上很常見,并且通常很明顯,因為在亮度降低的情況下,比預期更多的燈會“ON”。在此測試中,前接地點電阻在 8秒時更改為1千歐姆,作為故障工具內的參數故障,如下圖5所示。

圖5 潛通路分析的故障設置
由于這種接地故障,左前燈、右前燈和右后燈串聯連接,它們通過右后接地形成備用接地,如下圖6所示。當左邊的指示燈應該單獨打開時,由于潛通路的存在,這些意外的燈會在降低的電壓下打開。

圖6 前面接地故障導致的潛通路
使用實驗文件“Sneak_Analysis”仿真以執行潛通路分析。在此潛通路分析中,標稱操作測試的pass/fail標準將被重新檢查。仿真完成后,您應注意以下幾點實驗報告圖7和信號波形圖8。

圖7 潛通路分析實驗報告

圖8 潛通路分析波形圖
從實驗報告中可以觀察到,只有左后燈通過了測試并按預期工作。因此,可以使用 SaberRD中的故障工具通過查找所有可能的接地路徑,依次設置故障來自動分析潛通路現象。
2.3. 故障分析
SaberRD中的故障工具可用于分析設計中的各種故障(開路、短路和參數故障)。本節我們再分析一些故障的影響。這里我們在故障工具中設置了以下3個故障,如圖9 所示。
1)右前燈正極端子開路 - 發生在3秒
2)右前燈正極和負極短路 - 發生在3秒
3)閃光燈輸出打開 - 發生在7秒

圖9 故障設置
可以通過故障工具中的“Fault begin”和“Fault End”字段來控制故障的時間。通過實驗分析器,這些故障注入的仿真和后處理是自動化的。要對這些故障進行故障分析,請使用實驗文件“Fault_Analysis”運行仿真。對這些故障中的每一個自動進行仿真,仿真后您將獲得如圖10多個波形,得到如圖11所示的實驗報告。

圖10 故障分析波形圖

圖11 故障分析實驗報告
注意:您還可以通過對故障進行分組來注入并發故障。
要查看僅與特定注入故障對應的波形,您可以在運行仿真之前單獨啟用該特定故障,如下圖12所示,或者您可以使用成員屬性選項控制顯示的多成員信號的可見性,如圖所示13。

圖12 故障選擇
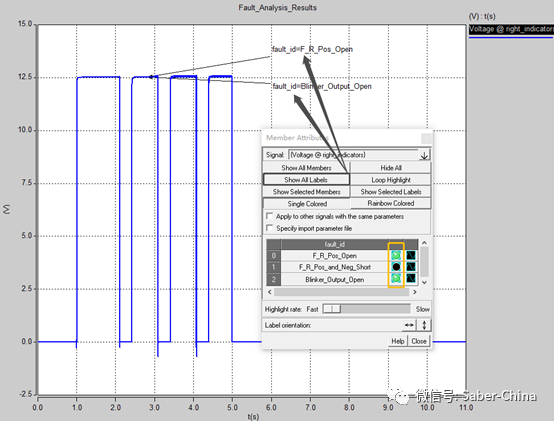
圖13 控制多成員信號
正如您在實驗報告中看到的那樣,對于每個故障,某些測試標準是失敗的。通過分析實驗報告中每個故障的通過/失敗測試結果,可以發現
1)“右前燈正極端子開路”故障僅影響右前燈。
2)故障“右前燈正負端短路”影響所有燈,在此故障場景中所有測試標準都失敗。這是因為當短路故障發生在3秒時,閃光器輸入線路保險絲熔斷以保護電線和組件。參看圖14的仿真過程截圖。
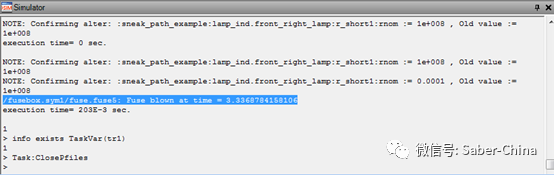
圖14 SaberRD仿真過程窗口截圖
3)發生在7秒時的“Blinker output open”故障影響左前、左后指示燈,該故障場景通過其它測試標準。
3. 結論:
在本設計示例中,針對典型的汽車轉向指示燈電路演示了自動潛通路分析。這種方法可用于任何設計,因此使用SaberRD中的故障工具和實驗分析器,可以輕松地自動化和分析包括潛通路在內的各種故障場景。
-
閃光器
+關注
關注
1文章
47瀏覽量
28461 -
電池供電
+關注
關注
0文章
253瀏覽量
22131 -
電流浪涌
+關注
關注
0文章
6瀏覽量
6608 -
汽車指示燈
+關注
關注
1文章
2瀏覽量
2394
發布評論請先 登錄
相關推薦
指示燈在汽車中的運用
汽車儀表盤指示燈大全(圖解)_汽車儀表盤指示燈詳解

三菱PLC指示燈的含義,如何根據指示燈判斷PLC故障
分享一個3針固態汽車轉向指示燈閃光器電路
自行車轉向指示燈電路圖





 工商網監
工商網監
評論