 增益大于1的正反饋很難穩定存在?
增益大于1的正反饋很難穩定存在?
可以。
估計這個問題拿去問analog designer,90%的人會說不可以。
這個問題更嚴格的提一下,就是一個環路,dc時增益》1( 0dB),相位為0(有的仿真器默認加了一個負號,所以那里就是180度)這個系統能穩定存在嗎?
一個很trival的答案是pll。做pll的人會發現,這就是pll的環路特性。由于dc點的雙極點,導致了這個特性,但是由于零點的加入,又補償回來。因此pll能夠穩定的工作(但是別把pll本身的震蕩和環路的震蕩混為一談)。
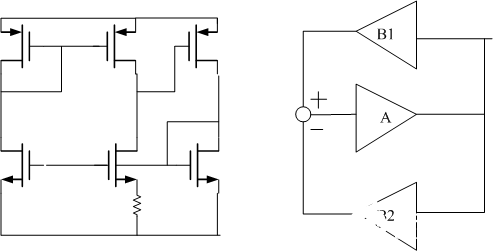
如果除開pll這種環路呢?就是在dc上不是雙極點導致的相位變化。這更接近我們平時認為的正反饋。99.99%的人會說不可以穩定存在。但是我的答案仍然是可以。而且這個環路我們經常見到,那就是在bandgap里。有人會說,bandgap是兩個環路,一個正的一個負的,負的要強于正的,有人說bandgap是一個增益小于1的正反饋。其實從信號的角度看,兩個說法都沒錯,但是還可以引入第三個說法, 它也可以被看成一個增益大于1的正反饋。橫看成嶺側成峰,都是對同一電路的不同表述而已。
這個答案之說以出乎意料,是因為傳統意義上增益大于1的正反饋的確很難穩定存在。pll是由于雙極點與零點共同作用的結果。如果dc上沒有極零點,那在后面添加任何極零點,都會導致奈奎斯特曲線繞-1。所以這個的秘密在于在這種看法做出的信號流圖里又有一個local 正反饋,導致一個右極點可能出現,從而穩定。這與奈奎斯特穩定判據沒有任何的沖突。
說到這里,多說兩句:模擬教科書上給初學穩定性的人總是喜歡舉個例子,一個環路,信號在其中反饋,如果每次反饋回去信號都同符號且變大了,系統就不穩定了。。。但是這個例子對于想深入理解穩定性的人來說,是及其不友好的。這就像對初學物理的人說,你踢一腳球,球會動,因此力是物體運動的原因。懂的都懂。
為什么這樣說呢?因為按照這個例子,馬上會有人問,當bode圖在0dB之前相位降下去然后再返回來,是不是應該是不穩定的?因為這時相位為正,增益為正,正反饋了啊。其實這個問題是假問題,因為出現這種圖像,并沒法說系統是穩定還是不穩定的。
我們必須回到最根本的定義上去,不穩定是指傳輸函數閉環之后有右極點。bode圖是傳輸曲線的一個特殊截面,相位為正增益為正是這個截面上某個點。根據復變函數的特性,這個特殊截面整體可以表征這個曲線閉合后特性,但是只看某些點,并沒有定理可以證明能表征。所以穩定性不是看看某點就可以了。奈奎斯特穩定性判據就是說用這個特殊截面怎么看閉合后特性,這個定理是嚴格證明的,充分性必要性都是很強的。相位裕度,增益裕度,更接近與工程近似與簡化。
審核編輯:黃飛
-
仿真器
+關注
關注
14文章
1016瀏覽量
83644 -
pll
+關注
關注
6文章
775瀏覽量
135051 -
函數
+關注
關注
3文章
4307瀏覽量
62433
發布評論請先 登錄
相關推薦
一文解析電流正反饋的電壓負反饋調速系統
借助更多的選項響應正反饋






 工商網監
工商網監
評論