") 雷達(dá)目標(biāo)檢測方法總結(jié)
雷達(dá)目標(biāo)檢測方法總結(jié)
目標(biāo)檢測問題
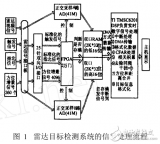
雷達(dá)返回的信號(hào),經(jīng)A/D采樣后輸出。
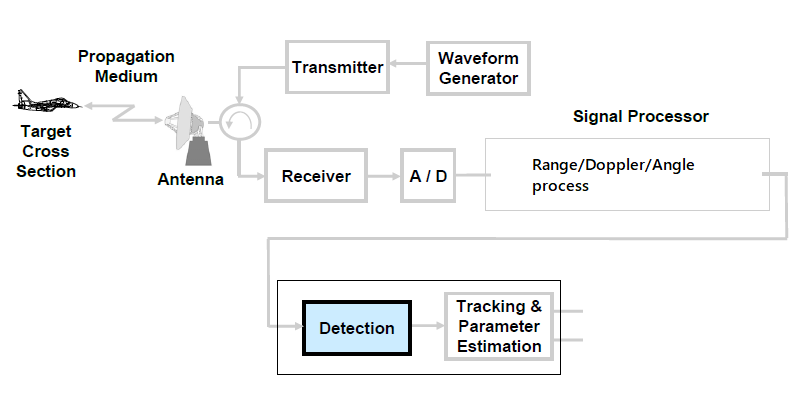
而輸出的信號(hào),除了有目標(biāo)信號(hào)外,還包含了環(huán)境的噪聲信號(hào)。
?目標(biāo)檢測任務(wù)就是,如何從含有噪音的信號(hào)中提取有效的目標(biāo)信息,最大化檢測概率,最小化誤報(bào)概率。
?雷達(dá)數(shù)據(jù)的特征
目標(biāo)速度快慢,離雷達(dá)的遠(yuǎn)近,在雷達(dá)波形中都有直觀體現(xiàn),使得雷達(dá)數(shù)據(jù)信號(hào)具有數(shù)學(xué)統(tǒng)計(jì)特征,這主要反映在幅度、頻率、相位方面:
- 當(dāng)有目標(biāo)出現(xiàn)時(shí),目標(biāo)反射的無線電波能量較強(qiáng),導(dǎo)致雷達(dá)接收到的信號(hào)幅度增加,雷達(dá)回波的幅度會(huì)相對較大。
- 當(dāng)目標(biāo)物體靠近雷達(dá)時(shí),回波的頻率會(huì)升高;反之,當(dāng)目標(biāo)物體遠(yuǎn)離雷達(dá)時(shí),回波的頻率會(huì)降低,因此,目標(biāo)物體的運(yùn)動(dòng)會(huì)引起雷達(dá)回波的頻率發(fā)生變化。
- 當(dāng)目標(biāo)靠近雷達(dá)時(shí),回波的相位會(huì)提前;當(dāng)目標(biāo)遠(yuǎn)離雷達(dá)時(shí),回波的相位會(huì)延后。
- 另外,雷達(dá)系統(tǒng)根據(jù)目標(biāo)距離和速度調(diào)整脈沖重復(fù)頻率(PRF),以保持對目標(biāo)的連續(xù)跟蹤。當(dāng)目標(biāo)距離較遠(yuǎn)時(shí),脈沖重復(fù)頻率較低;當(dāng)目標(biāo)距離較近時(shí),脈沖重復(fù)頻率較高。
因此,相應(yīng)的就可以使用數(shù)學(xué)分析方法,例如
- 標(biāo)準(zhǔn)差:使用標(biāo)準(zhǔn)差來雷達(dá)信號(hào)的離散程度。
- 相關(guān)性:反映雷達(dá)信號(hào)各相鄰脈沖之間的相關(guān)性,可用于判斷目標(biāo)的運(yùn)動(dòng)狀態(tài)。
- 功率譜密度:反映雷達(dá)信號(hào)在不同頻率上的能量分布,可用于分析目標(biāo)的頻率特征。
雷達(dá)目標(biāo)檢測方法
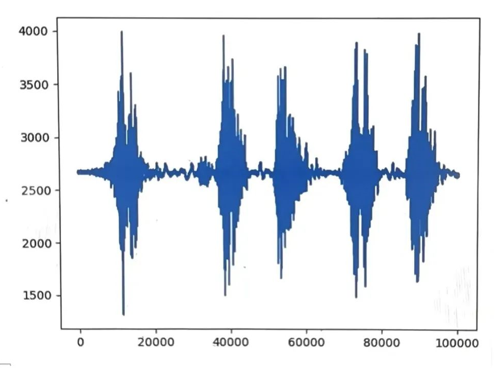
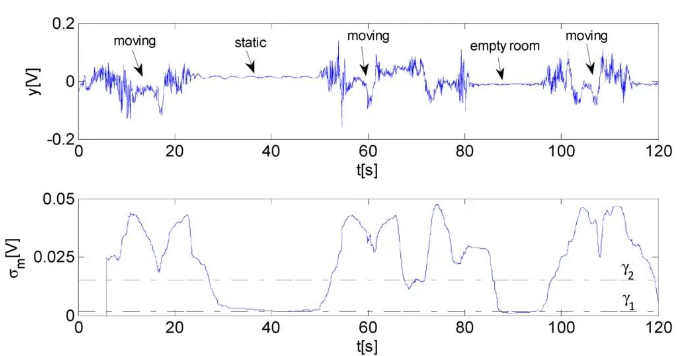
目標(biāo)的存在會(huì)引起雷達(dá)信號(hào)的明顯變化或等效地增加信號(hào)標(biāo)準(zhǔn)偏差,如下圖所示:
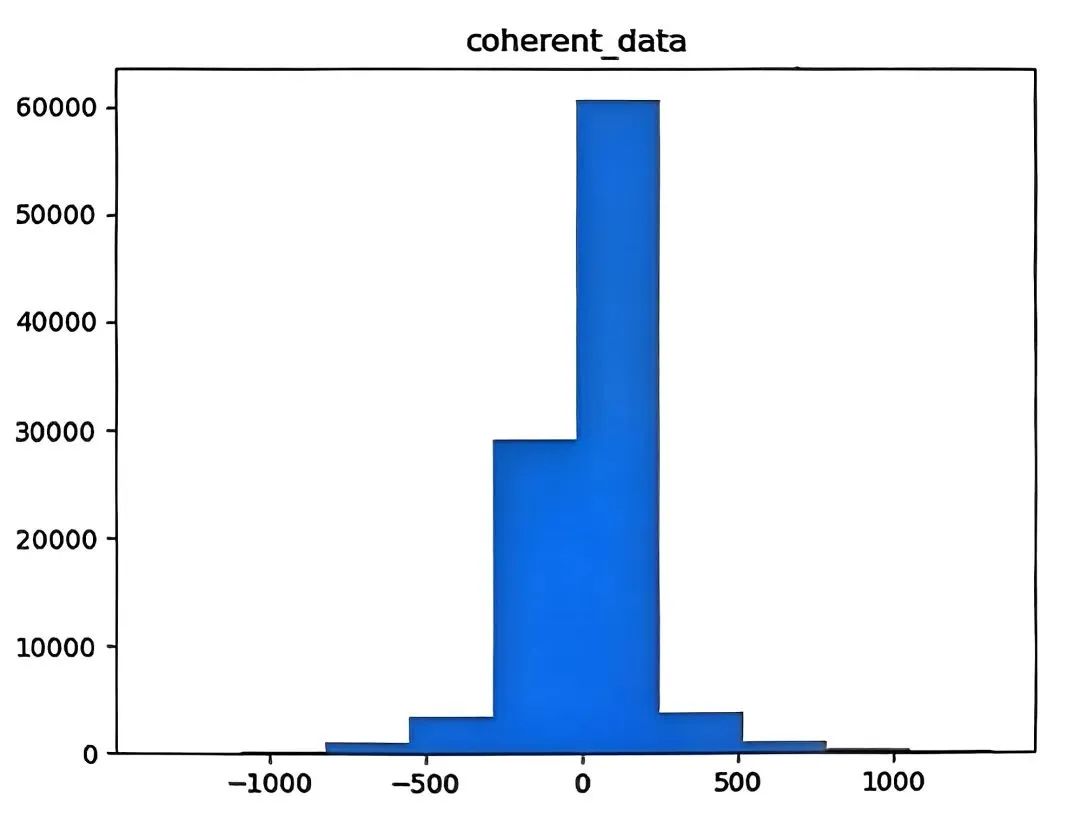
當(dāng)場景中不存在目標(biāo)時(shí),雷達(dá)信號(hào)的幅度集中在原點(diǎn)附近,而當(dāng)存在目標(biāo)時(shí),雷達(dá)信號(hào)的幅度在更寬的范圍內(nèi)變化,直方圖就簡單的反應(yīng)出了雷達(dá)回波信號(hào)的分布。
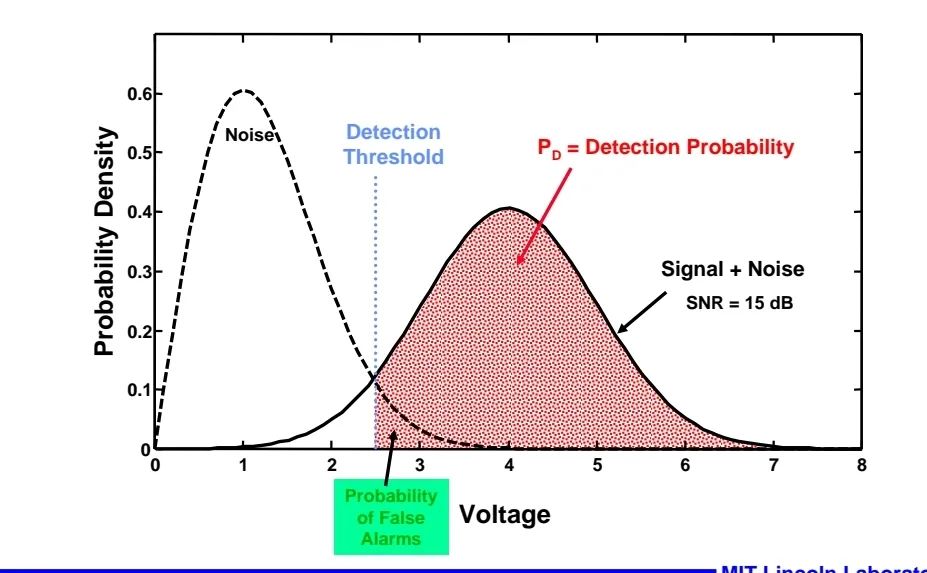
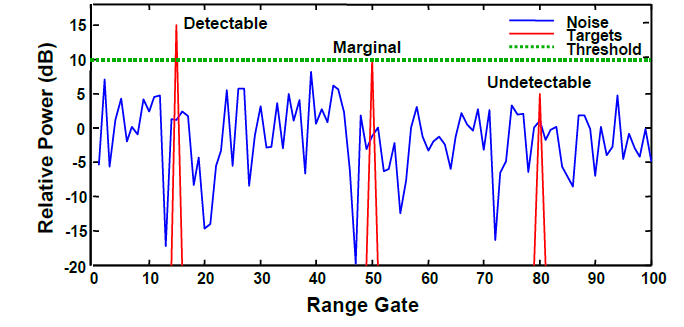
在雷達(dá)信號(hào)處理中,經(jīng)常使用一個(gè)閾值去過濾噪聲,但實(shí)際情況,由于噪音或者干擾信號(hào)的影響,很難選擇一個(gè)合適的閾值,如下圖所示,這就需要根據(jù)SNR(Signal-to-Noise) 水平,選取合適的技術(shù)或者多種技術(shù),來減小False Alarm。
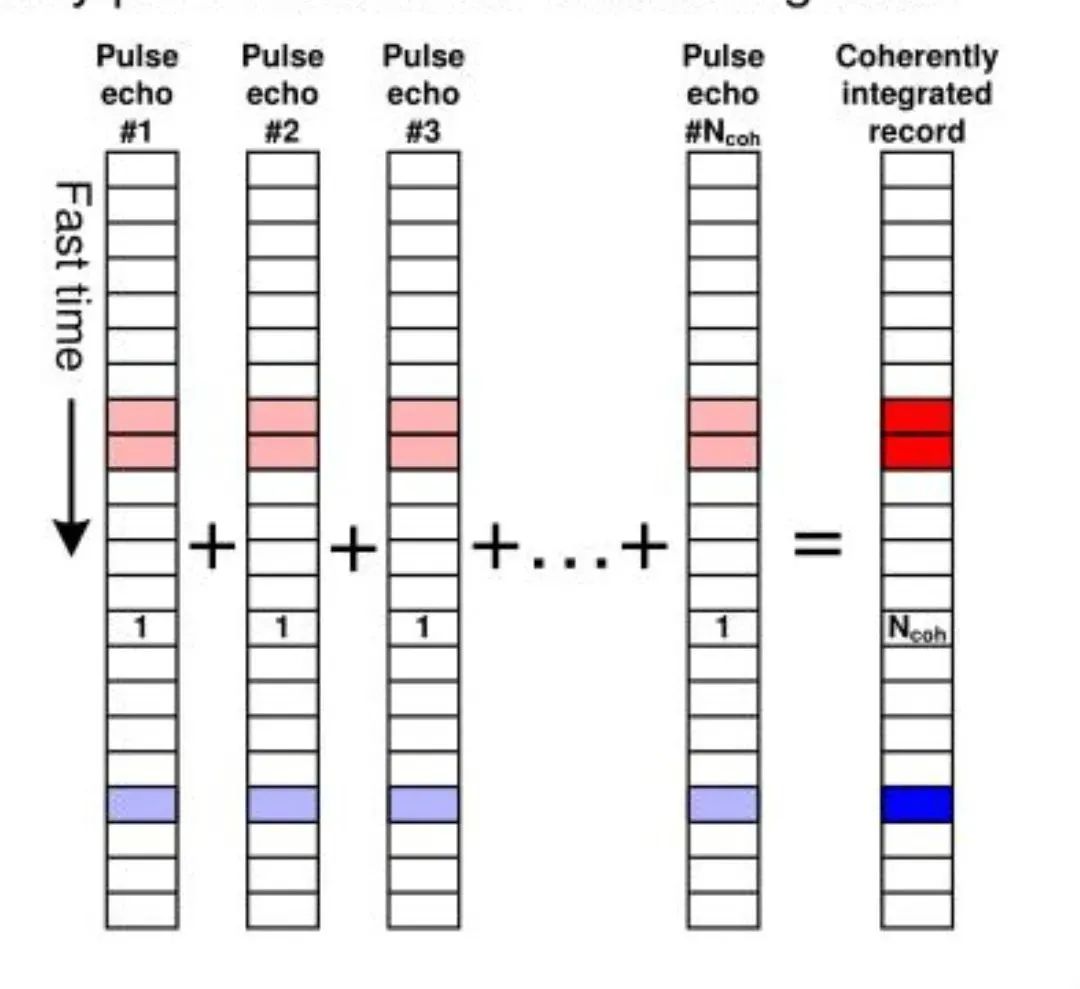
由于通常會(huì)受到噪聲和干擾的影響,當(dāng)我們想從噪聲中提取微弱有用信號(hào)時(shí),我們可以將多個(gè)信號(hào)集成(integration) 在一起處理,通過將信號(hào)樣本相加來提高信噪比,同時(shí)對噪聲和干擾進(jìn)行平均,這就是相干積分(Coherent integration)和非相關(guān)積分(non-coherent integration)
積分的結(jié)果是目標(biāo)信號(hào)增強(qiáng)了,而噪音信號(hào)減弱了。
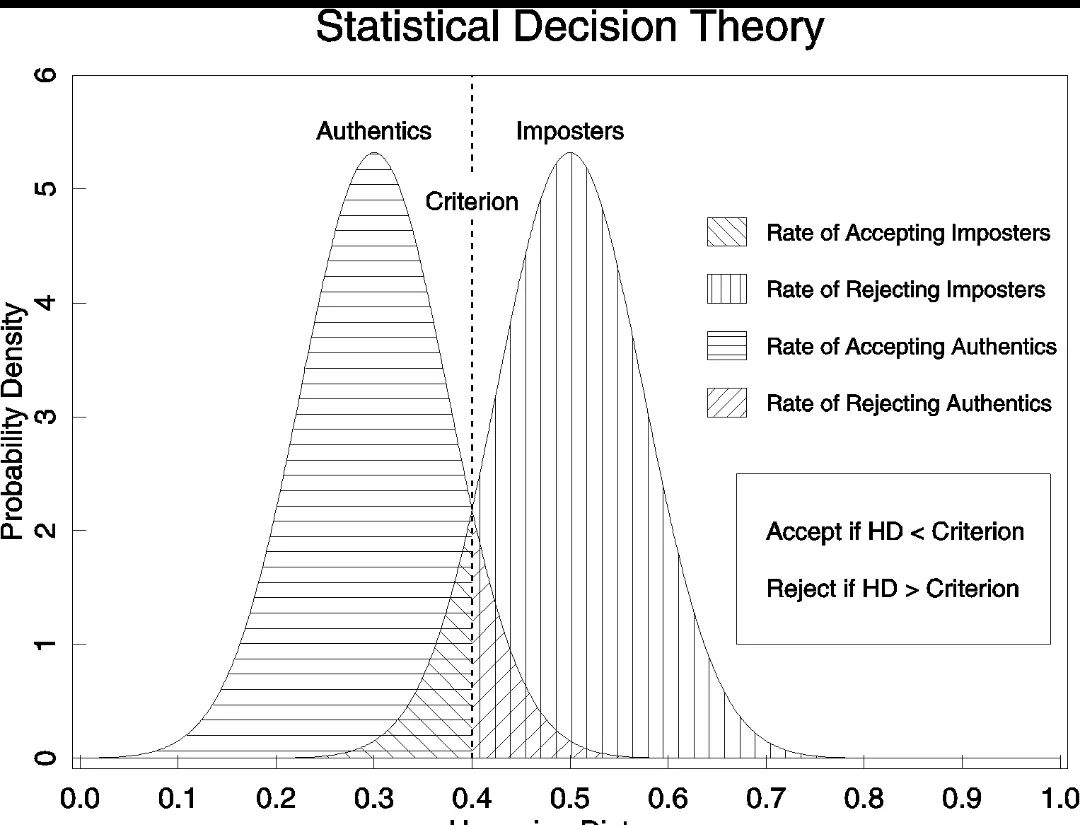
但是,在選取閾值時(shí),我們假設(shè)基于理論概率,并且僅限于具有已知方差(功率) 的高斯白噪聲。在實(shí)際應(yīng)用中,噪聲通常是有色的,其功率是未知的。假設(shè)雷達(dá)信號(hào)由噪聲和雜波組成,這使得檢測真實(shí)目標(biāo)變得困難。使用純噪聲樣本估計(jì)本底噪聲,這就是自適應(yīng)閾值方法。這就是CFAR技術(shù),CFAR(Constant False-Alarm Rate 恒定誤報(bào)率) 方法是雷達(dá)目標(biāo)檢測中使用的一種信號(hào)處理技術(shù),用于在存在噪聲和雜波的情況下檢測目標(biāo)。CFAR 方法被稱為“恒定誤報(bào)率”,因?yàn)樗荚诒3趾愣ǖ恼`報(bào)概率,而不管雷達(dá)信號(hào)中的噪聲和雜波水平如何。
例如CA-CFAR的估計(jì)函數(shù):
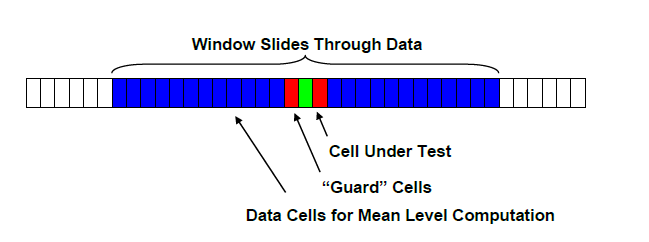
在存在噪聲和雜波的情況下,CFAR能減小誤報(bào)水平。但是,在復(fù)雜背景下,例如強(qiáng)雜波環(huán)境或目標(biāo)與背景特性相似的情況下,CFAR算法可能出現(xiàn)虛警,對動(dòng)態(tài)環(huán)境(如目標(biāo)速度、尺寸變化等)適應(yīng)性較差,因此,實(shí)際使用中,仍然可能需要結(jié)合其他方法。
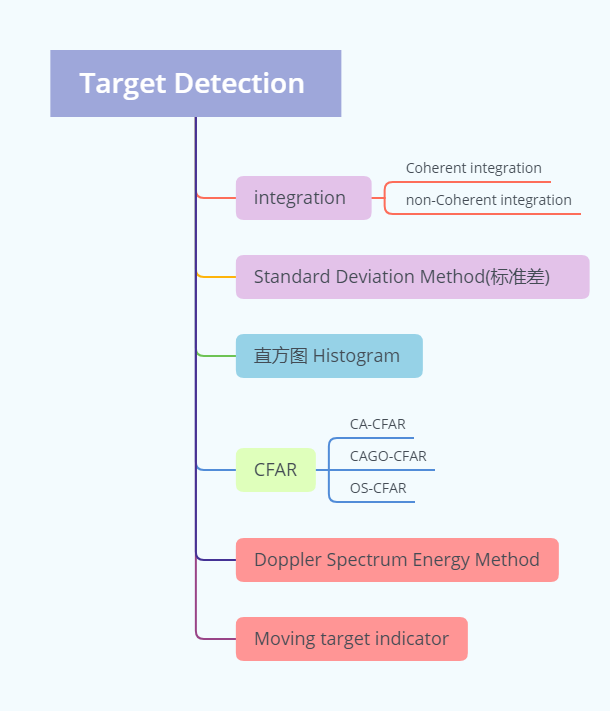
上圖簡單的羅列了幾項(xiàng)常見的目標(biāo)檢測方法,本文先作為一個(gè)階段性總結(jié),后續(xù)再接再厲,努力繼續(xù)完善。
-
信號(hào)
+關(guān)注
關(guān)注
11文章
2781瀏覽量
76649 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
2904瀏覽量
117348 -
無線電波
+關(guān)注
關(guān)注
2文章
249瀏覽量
25650 -
目標(biāo)檢測
+關(guān)注
關(guān)注
0文章
205瀏覽量
15590
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
雷達(dá)目標(biāo)檢測算法研究及優(yōu)化
雷達(dá)目標(biāo)檢測算法研究及優(yōu)化
畢設(shè)求助(可以有償)——基于FPGA的LFMCW雷達(dá)多目標(biāo)檢測方法
基于CPCI接口DSP板的雷達(dá)目標(biāo)模擬器
求大佬分享一種基于毫米波雷達(dá)和機(jī)器視覺的前方車輛檢測方法
基于Labview的雷達(dá)動(dòng)目標(biāo)仿真
基于隱馬爾可夫模型的MIMO雷達(dá)目標(biāo)檢測
中頻段雷達(dá)目標(biāo)的實(shí)時(shí)模擬方法研究

機(jī)場場面監(jiān)視雷達(dá)目標(biāo)檢測新方法
DSP_BIOS在雷達(dá)目標(biāo)檢測系統(tǒng)上的應(yīng)用
解析在目標(biāo)檢測中怎么解決小目標(biāo)的問題?
基于卷積神經(jīng)網(wǎng)絡(luò)的雷達(dá)目標(biāo)檢測方法綜述
基于并行Boosting算法的雷達(dá)目標(biāo)跟蹤檢測系統(tǒng)
AI驅(qū)動(dòng)的雷達(dá)目標(biāo)檢測:前沿技術(shù)與實(shí)現(xiàn)策略






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論