 一種用于永磁同步電機電流測量誤差校正的自適應選擇性諧波消除算法
一種用于永磁同步電機電流測量誤差校正的自適應選擇性諧波消除算法
一、文章摘要
在電流傳感器中,測量誤差是不可避免的,這會導致速度波動,包括定子的一倍和兩倍電氣頻率。對于不期望的諧波,自適應選擇諧波消除(ASHE)算法輸出和正弦信號乘以自適應權重。在里面為了解決當前測量誤差(CME)問題文章采用了ASHE算法。根據確定性表面安裝永磁體的功能關系同步電機(SPMSM),所采用的算法提取穩態速度誤差的諧波,并輸出q軸電流補償。
但是,沒有明確的聯系速度和d軸電流之間的關系,因此它們之間的關系是不確定的。剩余的d軸CME導致較差的電流性能。因此本文提出了一種改進的ASHE算法,其同時補償dq軸CME,取決于它們的相互確定性連接。所提出的方法確實不需要電機參數、額外的傳感器或復雜的計算過程。最后,驗證了該方法的有效性通過SPMSM平臺。實驗結果還表明所提出的方法減少了速度脈動并抑制了CME的影響。
二、主要研究內容
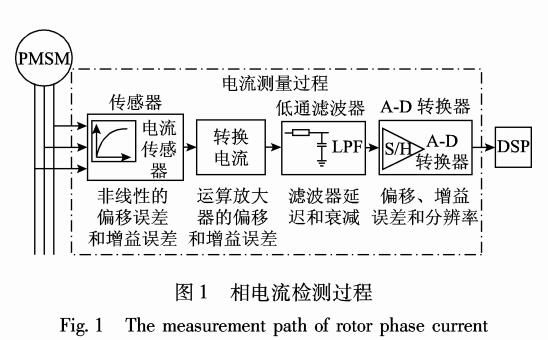
在交流電機驅動器中,相電流是傳感器輸出的電壓信號,它由模數轉換器通過匹配電路和噪聲濾波器電路進行處理。由于傳感器電路的非線性,工作環境,特別是溫度變化,即使系統設計和構造合理,電流測量誤差仍然不可避免。電流測量誤差主要包括偏移誤差和比例誤差,電流測量誤差產生的轉矩脈動在速度環中充當負載擾動,隨后產生基頻和雙基頻的速度振蕩。顯然,這些誤差需要受到限制或補償。
最簡單的方法是在系統停機時獲取和更新測量值,但是,無法處理比例誤差。因此,一種在線補償方法被提出,該方法基于速度或轉矩脈動信息以及電動機的機械參數來估計電流測量誤差,這種補償方法可以分為兩類:解決誤差影響和估計誤差值
三、所提方法
如圖1為電機的三相、兩相坐標系模型,為了便于控制,將傳感器測量得到的三相輸出電流is和電壓Vs通過坐標變換由三相靜止坐標系轉到兩相靜止坐標系,再轉到dq旋轉坐標系中。
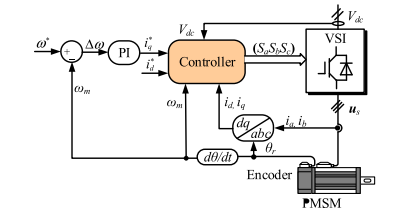
圖1 電機控制結構框圖
從三相靜止坐標系最終轉為兩相旋轉坐標系需要經過一次Clark變換和一次Park變換。首先利用Clark變換將三相靜止坐標系轉為兩相靜止坐標系,其變換矩陣有:
再利用Park變換將兩相靜止坐標系轉為dq兩相旋轉坐標系,其變換矩陣有:

本文使用的誤差校正方法為ASHE算法,該方法無需電機參數,無需額外的傳感器,無需復雜的計算過程,其原理為通過最小均方算法建立自適應諧波消除模型,如圖2為諧波消除模型的原理圖,其具體算法步驟如下:
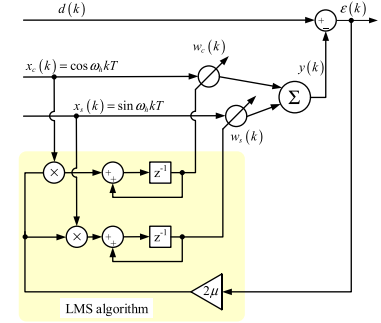
圖2 自適應消除模型
首先定義參考信號向量Xk ^T^ =[X k ^c^ Xk ^s^ ]和權重向量wk ^T^ =[w k ^c^ wk ^s^ ]。定義參考信號為兩個正交分量余弦和正弦,定義其為{Xk ^c^ =cos(ω0kT) Xk ^s^ =sin(ω0kT)},創建自適應諧波消除模型為y k =X k ^T^w k ,輸出yk為電流補償值i q_ASHE ,根據q軸補償分量和兩相旋轉坐標系的相互轉換特性可以得到d軸電流補償分量i d_ASHE 。
綜上定義權重迭代算法有:

上述式中k為時間索引量,T為采樣周期,wk為k時刻的權重量,wk+1為k+1時刻的權重量,μ為自適應增益常數,εk為角速度給定值的跟蹤誤差,ω ^*^ 為給定角速度,ωm為轉子角速度,ω0為要消除的目標角頻率。
在自適應過程緩慢且此時消除的高次諧波高于控制器帶寬時,自適應消除模型和模型預測控制相結合,假設權重緩慢變化并且常數恒定,可以分別得到dq軸電流的補償值有:

在永磁同步電機運行時,有光電編碼器得到轉子位置角,電流傳感器和電壓傳感器分別得到輸出三相電流和電壓,將三相電流測量值轉化為dq旋轉坐標系下的值即為id_mea和i q_mea ,將上述公式中計算到的dq軸電流的補償值對測量值進行補償。得到的值就是真正的dq軸電流分量。
四、實驗結果
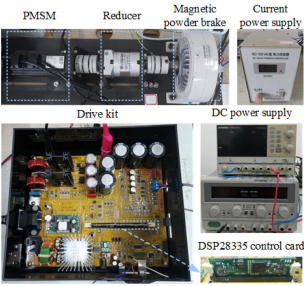
圖3 實驗平臺
表1 實驗參數
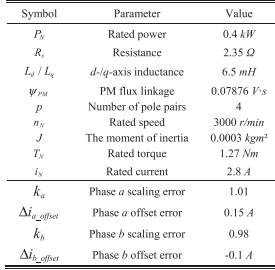
該方法在矢量控制中的應用已得到驗證在所搭建的電機驅動平臺中。系統參數為如表1所示。
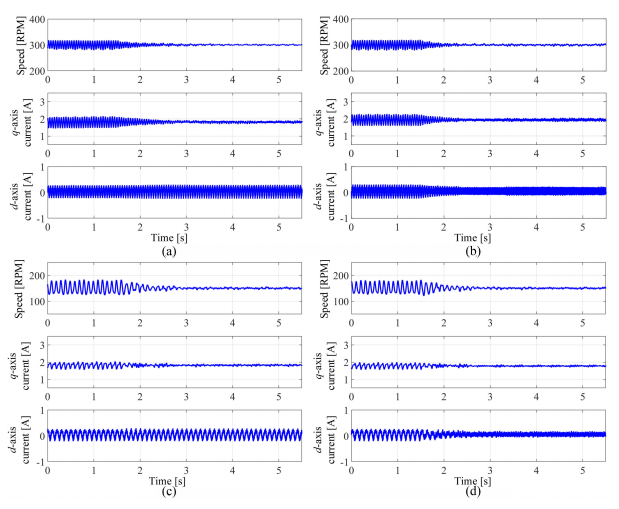
圖4 補償前后的波形對比圖
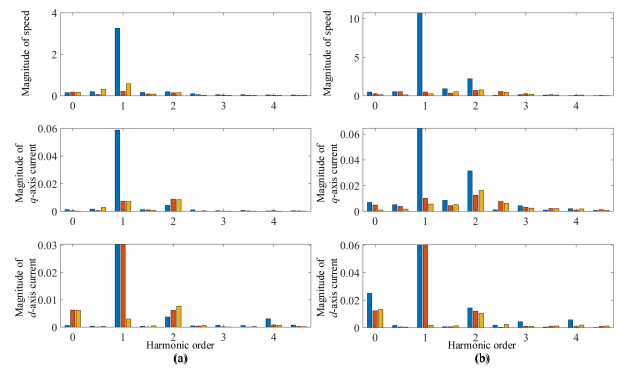
圖5 波形FFT分析
如圖可以發現由于電流采樣誤差的存在,引起了不同轉速下(300r/min和150r/min)下的轉速擾動和電流諧波的存在,而在進行ASHE電流采樣誤差的補償后,轉速逐漸趨于穩定,且有效抑制了電流諧波的產生,通過實驗,證明了此方法的有效性。
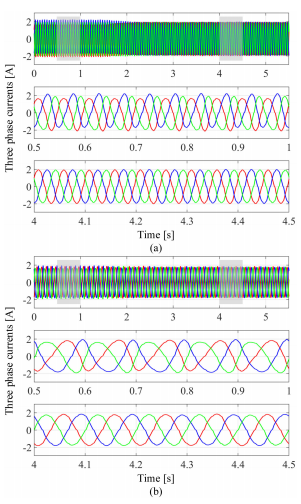
圖6 補償前后三相電流對比
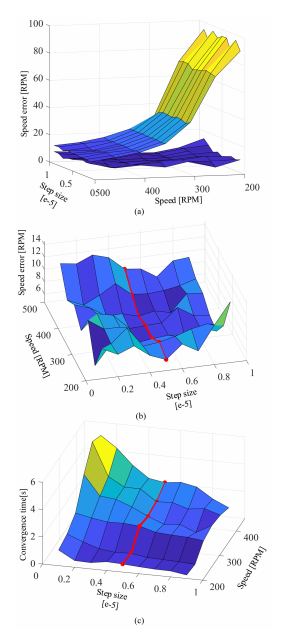
圖7 不同步長和轉速的實驗效果對比
圖7顯示了不同速度的實驗結果以及步長。在圖7(a)中,隨著速度的增加波紋減小。由于速度PI調節器的帶寬和力矩慣性的高次諧波被抑制。在對所提出的方法進行補償后,速度誤差顯著減少。補償效果和時間達到穩定狀態如圖7(b)和(c)所示。作用步長大小增加,收斂速度增加,時間對于穩定性降低,但誤差降低效果不是好的相反,當步長減小時,大大增加了收斂時間。因此考慮到整體性能,本文中的步長為5e?6。
五、結論
電機中的電流采樣誤差問題產生速度和定子電氣頻率為一倍和兩倍的轉矩脈動。本文提出了一種適用于永磁同步電機的電流采樣誤差校正方法。改進的ASHE算法用于直接估計和補償dq軸電流采樣誤差。在性能、速度方面紋波得到抑制,三相電流恢復到平衡和電流采樣誤差的負面影響被抑制。
本文的主要貢獻是采用ASHE算法求解電流采樣誤差問題,并用確定性函數關系來補償q軸電流在速度和q軸電流之間。此外,對于速度和d軸電流之間的聯系,本文使用dq軸CME的相互確定性連接d軸電流補償。
六、心得體會
由于傳感器的工作環境的變化,電流的測量誤差包括比例誤差和偏移誤差在實際中不可避免。在解決電流測量誤差方面,目前主要使用的有附加傳感器將扭矩誤差轉換為電流補償的方法,還有方法利用積分計算定子磁通的漂移得到直流偏置電壓前饋消除誤差。但這些方法對于傳感器和計算的要求比較高,不利于實際使用。
本文所提出的方法不需要額外的傳感器,電機參數和復雜的計算過程。此外,它不改變現代電機控制技術的結構,具有廣泛的適用性。除了普通矢量控制,所提出的方法適用于其他技術,例如直接轉矩控制和模型預測控制。這個高階諧波也可以作為ASHE算法的改進目標。
-
永磁同步電機
+關注
關注
28文章
868瀏覽量
49496 -
噪聲濾波器
+關注
關注
0文章
21瀏覽量
13227 -
電機驅動器
+關注
關注
16文章
633瀏覽量
64611 -
電流傳感器
+關注
關注
10文章
975瀏覽量
41100 -
三相電流
+關注
關注
0文章
94瀏覽量
11013
發布評論請先 登錄
相關推薦
基于二階廣義積分器的永磁同步電機定子磁鏈觀測方法
【下載】《現代永磁同步電機控制原理及MATLAB仿真》——同步電機MATLAB仿真與技術分析
永磁同步電機參數自適應調速控制
基于非均勻氣隙永磁同步電機PMSM的自適應混沌同步控制方法
永磁同步電機電感參數旋轉辨識算法







 工商網監
工商網監
評論