") 網(wǎng)聯(lián)自動駕駛車輛通過信號交叉口的速度軌跡優(yōu)化方案
網(wǎng)聯(lián)自動駕駛車輛通過信號交叉口的速度軌跡優(yōu)化方案
文章摘要
以網(wǎng)聯(lián)自動駕駛汽車(Connected Autonomous Vehicle,CAV)為研究對象,研究了CAV車隊通過城市信號交叉口的速度軌跡優(yōu)化控制策略。基于最優(yōu)控制理論,采用CAV的自動駕駛模型描述車間相互作用,以所有CAV車輛在行駛過程中的總油耗為優(yōu)化目標(biāo),根據(jù)信號燈的配時信息建立模型約束,通過優(yōu)化CAV頭車的速度軌跡,保證整個CAV車隊在綠燈相位下快速通過交叉口并實現(xiàn)油耗最小。
為了對該優(yōu)化控制進(jìn)行高效求解,采用離散Pontryagin極小值原理建立最優(yōu)解的必要條件,利用基于神經(jīng)網(wǎng)絡(luò)訓(xùn)練的彈性反向傳播(Resilient backpropagation,RPROP)算法設(shè)計了數(shù)值求解算法。多個典型場景的仿真結(jié)果顯示:整個CAV車隊均能在不停車的情形下通過信號交叉口,避免因在紅燈時間窗到達(dá)停車線造成的停車、啟動等過程,總油耗量最高可減少69.74%。該控制方法利用網(wǎng)聯(lián)自動駕駛技術(shù)的優(yōu)勢,顯著改善了城市交通通行效率和燃油經(jīng)濟(jì)性。
所提方法
1.CAV速度軌跡優(yōu)化模型
本文采用C.Letter提出的自動跟車算法描述CAV的駕駛行為,見下式。
式中: i =1,2,…, n ;a**i ( t )為第i輛車t時刻的瞬時加速度,m/s ^2^ ;s**i ( t )為第i輛車t時刻的瞬時位移,m;v**i ( t )為第i輛車的瞬時速度,m/s;h**t為期望車頭時距,s;d0為最小安全車間距,m;k1和k2為模型參數(shù)。
以CAV車隊每1輛車的位移和速度作為狀態(tài)變量(維數(shù)為2 n ), x =[s1v1s2v2 … snv**n ] ^T^ ,以CAV頭車的加速度 u ,m/s ^2^ ,為優(yōu)化控制變量,可以建立CAV車隊行駛的狀態(tài)方程模型 x ˙( t )= *f * [ *x* ( *t* ), *u* , *t* ],見下式。
為了計算車輛在行駛過程的油耗量,需要建立油耗模型。車輛油耗模型有很多,考慮到該模型計算量會隨著CAV車隊車輛數(shù)增加而增加,為了提高計算效率,筆者采用歐洲環(huán)保局(European Environment Agency,EEA)開發(fā)的基于平均速率的COPERT油耗模型,見下式。

式中:ρ1 ,ρ2 ,ρ3為COPERT模型參數(shù)。
以所有CAV車輛的總油耗為優(yōu)化控制的目標(biāo)函數(shù),見下式。
式中:t0和tf分別為控制初始時刻和終端時刻,s。
利用V2I通信,CAV獲取交叉口的信號配時,假設(shè)距離當(dāng)前時刻最近的綠燈相位時段[tg1 ,tg2 ],建立系統(tǒng)約束見下式。


上式通過對CAV車隊頭車在tg1時刻的位移以及尾車在tg2時刻的位移進(jìn)行約束,保證了CAV車隊的所有車輛均能在綠燈相位時段[tg1 ,tg2 ]通過交叉口。
考慮汽車的能力限制,行駛的速度需要滿足約束,見下式。

式中:vmin為最低車速,m/s,vmax為最高車速,m/s。
綜上,式(2)和式(4)~(7)為基于最優(yōu)控制的CAV速度軌跡優(yōu)化模型,通過優(yōu)化CAV頭車的速度軌跡,便可以保證CAV車隊所有車輛均能在綠燈相位下高效地通過交叉口,同時最小化所有車輛的燃油消耗總量,提高燃油經(jīng)濟(jì)性。
2 基于RPROP的求解方法
2.1最優(yōu)解的必要性條件
為了在計算機(jī)上實現(xiàn)對上述最優(yōu)控制問題的高效求解,對其進(jìn)行離散化處理,接著通過懲罰函數(shù)法將不等式約束進(jìn)行處理,通過引入拉格朗日乘子,將其轉(zhuǎn)化為無約束的最優(yōu)控制問題,最后利用離散系統(tǒng)Pontryagin極小值原理建立最優(yōu)解的必要條件。
以Δt為離散步長,以[0,tg2 ]為優(yōu)化控制周期,共K個離散時刻,kg1對應(yīng)綠燈時間窗的開始時刻tg1 ,綠燈時間窗的結(jié)束時刻tg2為控制結(jié)束時刻 K 。采用差分法對CAV車隊動態(tài)模型進(jìn)行離散化,得到如下形式。


根據(jù)模型約束,構(gòu)造如下懲罰函數(shù):
引入懲罰因子構(gòu)造離散最優(yōu)控制的增廣目標(biāo)函數(shù):


式中:為懲罰因子。
構(gòu)造Hamiltonian函數(shù),見下式。

利用Pontryagin極小值原理建立最優(yōu)解的必要條件。


2.2基于RPROP的求解算法
采用基于神經(jīng)網(wǎng)絡(luò)訓(xùn)練的彈性反向傳播算法(RPROP)方法,構(gòu)造梯度方向,設(shè)計求解算法。其基本思想為:從某個初始值開始,根據(jù)Pontryagin極小值原理(見2.1節(jié))得到梯度方向,并根據(jù)歷史梯度信息動態(tài)更新搜索步長以加快求解速度,設(shè)計基于RPROP的求解算法。
離散化系統(tǒng)極小值的條件:
在搜索解的過程中,RPROP方法根據(jù)梯度符號決定搜索的方向,并根據(jù)搜索過程的結(jié)果動態(tài)調(diào)整搜索步長,可以保證求解的快速性。雖然RPROP方法無法保證收斂到全局最小值,但在實際應(yīng)用中往往能獲得比較滿意的最優(yōu)解。
梯度值 h ( k )可根據(jù)Hamiltonian函數(shù)見下式。
建立控制向量的迭代公式,見式(17)。

仿真實驗
通過仿真實驗,驗證本文所設(shè)計的CAV速度軌跡優(yōu)化策略。為了便于對比分析,分別將優(yōu)化控制前、后的結(jié)果進(jìn)行對比分析。在仿真過程中,假設(shè)交叉口停車線上游550 m處,有5輛車形成的CAV車隊,初始速度為10 m/s,初始加速度0 m/s ^2^ ,V2I的最大通信距離為350 m(A點),也就是說:一旦CAV進(jìn)入ICU可通信范圍,即可與路側(cè)基礎(chǔ)設(shè)施進(jìn)行通信。
初始時刻信號燈為綠燈相位,綠燈時間窗為[0,30 s],仿真結(jié)果見圖1。
由圖1可見,在該場景中,車隊初始時刻以10 m/s的速度行駛。在沒有采取優(yōu)化控制的情況下,CAV車輛繼續(xù)勻速行駛,錯過了第1個綠燈相位(時間窗為[0 s,30 s]),在紅燈相位時間到達(dá)停車線,唯有停車等待下1個綠燈相位。采取本文設(shè)計的速度軌跡控制策略后,CAV一旦進(jìn)入ICU的通信距離,就可接收到ICU廣播的信號配時信息,開始進(jìn)行軌跡優(yōu)化。CAV頭車在優(yōu)化過程中,不僅考慮本車,而且考慮整個車隊的通行效率,于是CAV頭車開始加速,使車隊所有CAV車輛無需停車等待,均能在第1個綠燈相位通過交叉口。
由于優(yōu)化過程中考慮了燃油經(jīng)濟(jì)性的優(yōu)化,故加速過程中并未出現(xiàn)較大幅度的變速(整個運(yùn)動過程中,0 m/s ^2^ ≤ a ≤2.93 m/s ^2^ ),經(jīng)過COPERT模型的計算,總油耗量減少了69.74%。可見,通過本文設(shè)計的軌跡優(yōu)化控制策略,CAV頭車及時地根據(jù)信號配時信息進(jìn)行軌跡優(yōu)化,保證車隊所有車的行駛效率,避免了因在紅燈時間窗到達(dá)停車線造成的減速、停車、加速行為,顯著減少了燃油消耗量。
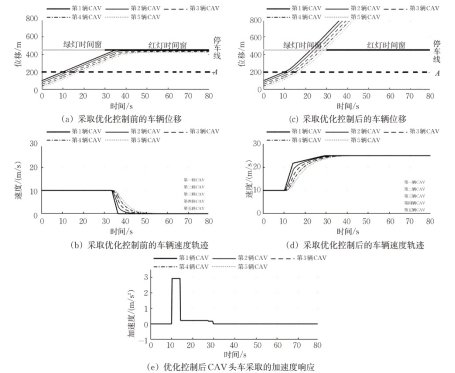
圖1 場景1仿真結(jié)果對比圖
閱讀心得
本文構(gòu)建了基于最優(yōu)控制的CAV車輛通過信號交叉口的速度軌跡優(yōu)化控制模型,并利用離散系統(tǒng)Pongryagin極小值原理建立最優(yōu)解的必要條件,采用RPROP算法方法設(shè)計了求解方法,在保證求解質(zhì)量的同時提高了求解速度。
仿真結(jié)果顯示,CAV根據(jù)基于V2I通信獲得實時信號配時信息,提前對自身速度軌跡進(jìn)行調(diào)整,保證所有CAV車輛在綠燈相位時間窗無停車通過信號交叉口,避免因在紅燈時間窗到達(dá)停車線造成的減速、停車、啟動加速等過程,顯著減少了所有車輛的總油耗,提高了通行效率。由于本文只考慮了CAV在單車道行駛的情況,在未來的研究中,將進(jìn)一步研究CAV在多車道的行駛情況,考慮CAV的換道行為,對CAV的速度軌跡進(jìn)行優(yōu)化。
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4762瀏覽量
100535 -
自動駕駛汽車
+關(guān)注
關(guān)注
4文章
376瀏覽量
40815
發(fā)布評論請先 登錄
相關(guān)推薦
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
細(xì)說關(guān)于自動駕駛那些事兒
自動駕駛的到來
如何讓自動駕駛更加安全?
實現(xiàn)全自動駕駛尚需要眾多技術(shù)革新之一智能網(wǎng)聯(lián)汽車介紹
從輔助駕駛到自動駕駛: 感知型車輛建立在底層高質(zhì)量的傳感器數(shù)據(jù)基礎(chǔ)之上
UWB定位可以用在自動駕駛嗎
網(wǎng)聯(lián)化自動駕駛的含義及發(fā)展方向
信號交叉口模糊邏輯自適應(yīng)控制
RFID原理簡介及其在交叉口車流量檢測系統(tǒng)中的應(yīng)用

一種新型交叉口排隊長度均衡控制方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論