何為PID?為何需要PID?PID能達到什么作用?
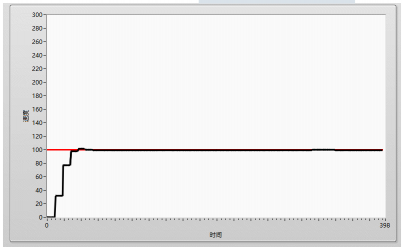
PID是英文Proportional-Integral-Derivative的縮寫,即比例-積分-微分控制器。它是一種常用的反饋控制手段,常用于工業(yè)自動化控制系統(tǒng)中,通過不斷測量被控對象輸出的實際值與期望值之間的差別,并對控制信號進行調(diào)節(jié),最終使被控對象能夠穩(wěn)定地達到期望值。
PID控制器由比例控制、積分控制和微分控制三部分組成,每個部分都有不同的功能和作用。比例控制根據(jù)實際值與期望值之間的誤差進行調(diào)節(jié),根據(jù)誤差的大小來確定控制信號。積分控制根據(jù)誤差與時間的乘積進行調(diào)節(jié),用于補償比例控制無法完全消除的穩(wěn)態(tài)誤差。微分控制根據(jù)誤差的變化率進行調(diào)節(jié),用于響應(yīng)速度較快的系統(tǒng),避免超調(diào)和震蕩。
PID控制器之所以被廣泛應(yīng)用,有以下幾個原因:
1. 適用性廣泛:PID控制器可以應(yīng)用于各種類型的系統(tǒng),無論是簡單的溫度控制還是復(fù)雜的機械控制,都可以使用PID控制器進行調(diào)節(jié)。
2. 簡單易實現(xiàn):PID控制算法簡單,只需要根據(jù)系統(tǒng)的實際情況進行參數(shù)的調(diào)優(yōu)即可。同時,PID控制器的實現(xiàn)也相對容易,只需基本的數(shù)學(xué)和編程知識。
3. 魯棒性強:PID控制器對系統(tǒng)的變化和干擾具有較強的魯棒性,能夠穩(wěn)定地控制被控對象。即使受到外界干擾或系統(tǒng)參數(shù)發(fā)生變化,PID控制器也能及時進行調(diào)整,保持控制的準(zhǔn)確性。
4. 可調(diào)性好:PID控制器的三個參數(shù)(比例系數(shù)、積分時間、微分時間)可以根據(jù)實際情況進行調(diào)整,以獲取最佳的控制效果。通過合理選擇參數(shù),可以實現(xiàn)系統(tǒng)的快速響應(yīng)、準(zhǔn)確控制、穩(wěn)定性等要求。
總之,PID控制器是一種非常重要的控制手段,在工業(yè)自動化領(lǐng)域有著廣泛的應(yīng)用。它通過根據(jù)實際值與期望值之間的誤差進行調(diào)節(jié),能夠使被控對象穩(wěn)定地達到期望值,并具有適用性廣泛、簡單易實現(xiàn)、魯棒性強、可調(diào)性好等優(yōu)點。在實際應(yīng)用中,根據(jù)具體的需求和系統(tǒng)特點,可以對PID控制器的參數(shù)進行調(diào)整,以實現(xiàn)最佳的控制效果。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
相關(guān)推薦
在工業(yè)自動化和過程控制中,PID(比例-積分-微分)控制是一種廣泛應(yīng)用的控制策略。PID控制憑借其原理簡單、魯棒性強和實用面廣等優(yōu)點,已成為技術(shù)成熟、應(yīng)用最為廣泛的控制系統(tǒng)之一。本文將詳細介紹PID控制的原理、
![的頭像]() 發(fā)表于
發(fā)表于 06-12 11:45
?1545次閱讀
進行控制,使系統(tǒng)能夠快速、準(zhǔn)確地達到期望狀態(tài)。本文將詳細探討PID在工業(yè)控制領(lǐng)域的應(yīng)用,包括其基本原理、應(yīng)用場景、優(yōu)勢以及未來發(fā)展趨勢。
![的頭像]() 發(fā)表于
發(fā)表于 06-11 14:47
?664次閱讀
PID(比例-積分-微分)控制器作為工業(yè)自動化領(lǐng)域中的核心控制算法,廣泛應(yīng)用于各種需要精確控制的系統(tǒng)中。在PID控制器的實現(xiàn)中,有兩種主要的控制模式:位置式PID和增量式
![的頭像]() 發(fā)表于
發(fā)表于 06-05 16:23
?3817次閱讀
在工業(yè)自動化和過程控制領(lǐng)域,PID(比例-積分-微分)調(diào)節(jié)器是一種廣泛應(yīng)用的控制策略。其通過精確計算和調(diào)整系統(tǒng)的輸入信號,以實現(xiàn)系統(tǒng)輸出對設(shè)定值的穩(wěn)定跟隨。本文將詳細探討PID調(diào)節(jié)器的作用、工作原理、參數(shù)調(diào)整、應(yīng)用場景以及在現(xiàn)代
![的頭像]() 發(fā)表于
發(fā)表于 06-05 15:53
?1483次閱讀
在現(xiàn)代工業(yè)自動化控制系統(tǒng)中,PID(比例-積分-微分)控制器無疑是最常見且重要的控制算法之一。PID控制器以其簡單、實用、魯棒性強等特點,廣泛應(yīng)用于各種工業(yè)控制場合,如溫度控制、壓力控制、流量控制等。本文將對PID控制器的基本概
![的頭像]() 發(fā)表于
發(fā)表于 06-05 15:30
?1146次閱讀
PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。
PID已經(jīng)有107年的歷史了,它并不是什么很神圣的東西,大家一定都見過PID的實際應(yīng)用。
發(fā)表于 03-18 11:24
?8616次閱讀
信號進行比例、積分和微分運算,從而實現(xiàn)系統(tǒng)的穩(wěn)定控制和性能優(yōu)化。 PID控制器由三個部分組成:比例控制器(P),積分控制器(I)和微分控制器(D)。每個部分都有不同的作用,綜合起來實現(xiàn)對系統(tǒng)的精確控制。 比例控制器(P)根據(jù)控制誤差的大小,以比例放大的方式對反饋信號進行修
![的頭像]() 發(fā)表于
發(fā)表于 02-01 14:51
?1961次閱讀
)、積分(Integral)和微分(Derivative)作用的控制部分組成。PID控制器的輸出為下式所示: u(t) =
![的頭像]() 發(fā)表于
發(fā)表于 01-22 15:35
?3982次閱讀
在計算機科學(xué)中,PID(進程標(biāo)識符)是一個用于唯一標(biāo)識運行中的進程的整數(shù)值。PID主要具有以下三個參數(shù)作用: 進程創(chuàng)建:PID參數(shù)用于在操作系統(tǒng)中創(chuàng)建新的進程。當(dāng)操作系統(tǒng)啟動一個進程時
![的頭像]() 發(fā)表于
發(fā)表于 01-16 14:56
?1.1w次閱讀
過多的超調(diào)量,當(dāng)需要反向調(diào)節(jié)時能較快地響應(yīng),避免輸出長時間停留在飽和區(qū)。
02
微分項優(yōu)化處理
PID算法中微分項與偏差的變化速率有關(guān)。如果系統(tǒng)存在頻率較高的干擾或突變等情況時,微分項的數(shù)值會不斷跳變
發(fā)表于 12-22 15:38
在學(xué)習(xí) PID 算法的參數(shù)整定的時候,每一個系統(tǒng)的 PID系數(shù)是不通用的,在不同的系統(tǒng)中運用同樣的 PID系數(shù),其最終所體現(xiàn)的效果可能是相差可能甚遠的,所以我們需要根據(jù)實際的系統(tǒng)進行
![的頭像]() 發(fā)表于
發(fā)表于 11-14 17:12
?2720次閱讀
,輸出的PWM占空比還可以受限制于硬件限制(如PWM模塊的精度和頻率范圍)、電源限制和控制對象的響應(yīng)特性等。因此,在實際應(yīng)用中,可能需要進行實驗和調(diào)試,逐步微調(diào)PID參數(shù)和PWM設(shè)置,以達到較好的控制效果。
![的頭像]() 發(fā)表于
發(fā)表于 11-10 17:11
?8587次閱讀
歡迎來到森木磊石「技術(shù)微課堂」,本期為大家分享經(jīng)典控制算法之一的PID控制方法。PID控制方法從提出至今已有百余年歷史,其由于結(jié)構(gòu)簡單、易于實現(xiàn)、魯棒性好、可靠性高等特點,在機電、冶金、機械、化工等
![的頭像]() 發(fā)表于
發(fā)表于 11-08 08:23
?1317次閱讀

PID控制規(guī)律是一種較理想的控制規(guī)律,它在比例的基礎(chǔ)上引入積分,可以消除余差,再加入微分作用,又能提高系統(tǒng)的穩(wěn)定性。它適用于控制通道時間常數(shù)或容量滯后較大、控制要求較高的場合。如溫度控制、成分控制等。
![的頭像]() 發(fā)表于
發(fā)表于 10-16 09:56
?620次閱讀

熟透于心的15個PID基本概念。 先讀一首PID打油詩 1、被調(diào)量 被調(diào)量就是反映被調(diào)對象的實際波動的量值。被調(diào)量是經(jīng)常變化的。 2、設(shè)定值 PID調(diào)節(jié)器設(shè)定值就是人們期待被調(diào)量需要
![的頭像]() 發(fā)表于
發(fā)表于 09-25 19:40
?2024次閱讀
") 何為PID?為何需要PID?PID能達到什么作用?
何為PID?為何需要PID?PID能達到什么作用?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論