 感應電機傳統三電平直接轉矩控制方法
感應電機傳統三電平直接轉矩控制方法
導讀:本期文章介紹感應電機傳統三電平12扇區的直接轉矩控制。針對兩電平直接轉矩控制在高速時驅動功率不足和轉矩脈動大的問題,從而引進三電平來進行改善。
一、引言
為了解決兩電平傳統直接轉矩控制系統轉矩脈動大、響應慢和驅動功率不足的問題,本節介紹三電平逆變器的原理及其應用于異步電機直接轉矩控制的具體方法,通過MATLAB仿真驗證了其可行性和優越性,結果顯示該控制方法具有動態響應快、抗擾性強、轉矩脈動小、諧波分量小、開關頻率穩定等優點,對提高異步電機直接轉矩控制系統的性能以及減小開關管的損耗有一定的成效。
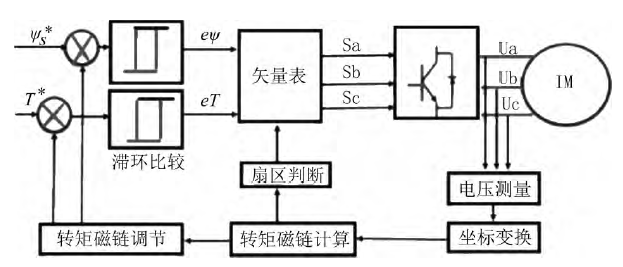
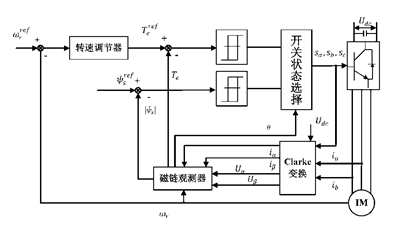
圖1-2 感應電機三電平12扇區的直接轉矩控制框圖
二、兩電平直接轉矩控制
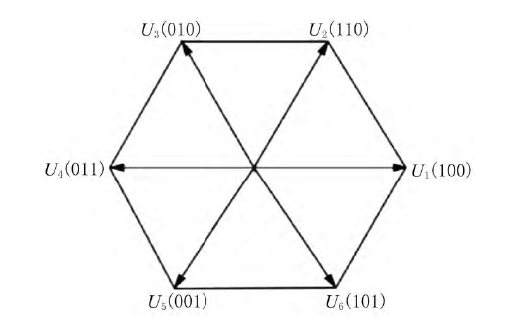
圖2-1 兩電平逆變器電壓矢量
兩電平的直接轉矩控制產生8個電壓矢量,其中有兩個零矢量用于減速或延時。這種控制方法比較粗糙不精確,尤其在定子磁鏈由某一扇區運動到零一扇區時,磁鏈軌跡會明顯脫離標準圓形軌跡,使磁鏈軌跡畸變,從而導致定子電流的突變,引起電磁轉矩的脈動,若電機高速運行則會造成轉軸的抖動,同時發生較大的噪聲,嚴重的會使電機線圈內的電流反復跳變,影響系統運行。
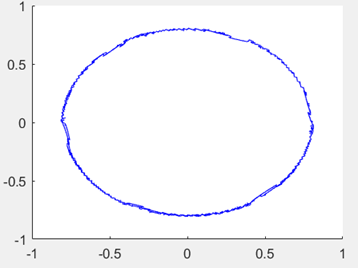
圖2-2 磁鏈圓軌跡
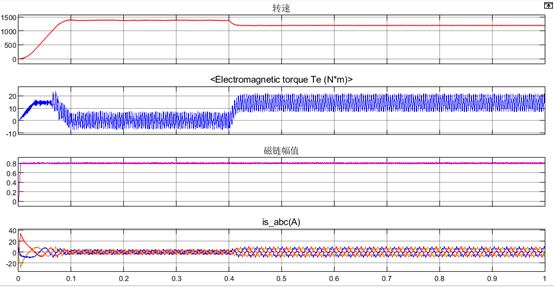
圖2-3 仿真波形變化情況
從圖(2-2)和(2-3)可知,磁鏈圓軌跡畸變和電磁轉矩的脈動比較大。
三、三電平直接轉矩控制
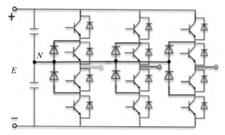
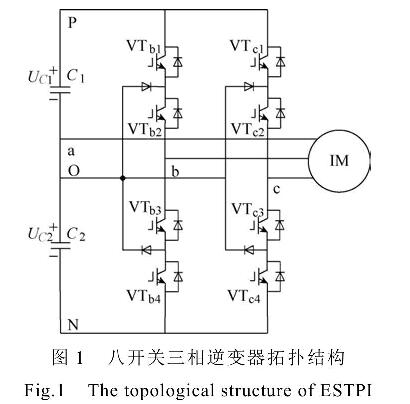
圖3-1 三電平逆變器拓撲原理圖
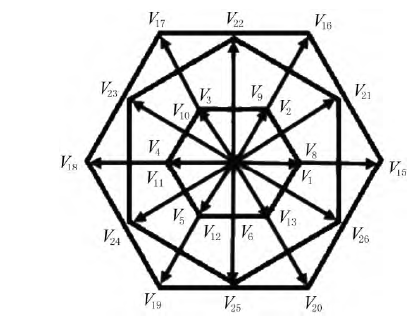
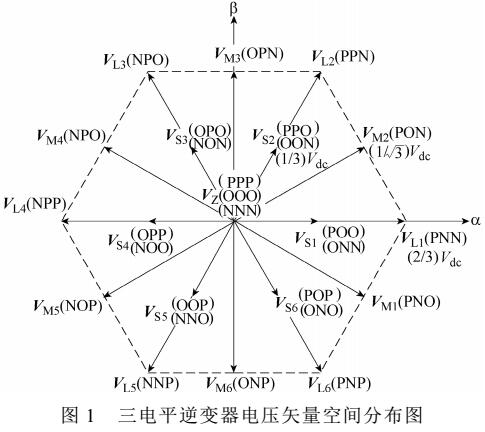
圖3-2 三電平逆變器的電壓矢量
從圖(3-2)可知,三電平逆變器有27個電壓矢量。與傳統的兩電平逆變器相比,在三電平逆變器中,電壓矢量為27,遠遠大于兩電平的矢量數8,所以矢量選擇范圍更廣,能夠更好地逼近正弦磁鏈,控制電機獲得更好的控制性能。
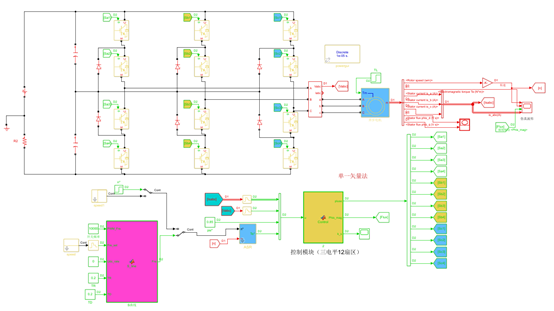
圖3-3 異步電機直接轉矩控制系統仿真(三電平12扇區)
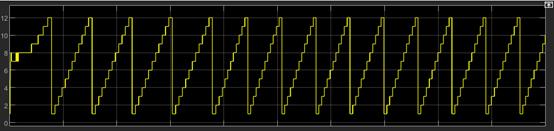
圖3-4 12扇區
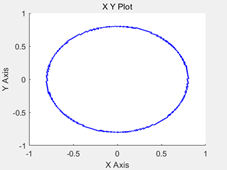
圖3-5 磁鏈圓軌跡
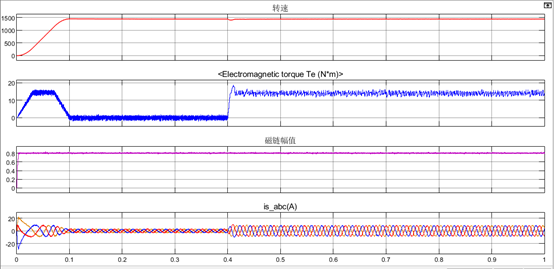
圖3-6 仿真波形變化情況
從圖(3-5)和(3-6)可知,磁鏈圓軌跡畸變和電磁轉矩的脈動比較小。
四、總結
本文敘述了兩電平傳統直接轉矩控制的控制原理,并進行了仿真,證實了其存在的不足。針對其不足引入了三電平逆變器,闡述了控制策略,分析了其整個控制過程,并通過仿真驗證了三電平多矢量控制對諧波抑制及減小轉矩脈動的有效性和應用于大功率非恒轉矩負載的實用性,較為顯著地提高了直接轉矩控制系統的抗擾性和控制精度。
審核編輯:湯梓紅
-
線圈
+關注
關注
14文章
1813瀏覽量
44362 -
異步電機
+關注
關注
6文章
427瀏覽量
32819 -
感應電機
+關注
關注
0文章
158瀏覽量
18129 -
轉矩控制
+關注
關注
0文章
38瀏覽量
8898 -
兩電平
+關注
關注
1文章
5瀏覽量
1829
原文標題:感應電機傳統三電平直接轉矩控制
文章出處:【微信號:淺談電機控制,微信公眾號:淺談電機控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

八開關三相逆變器-感應電機傳動系統直接轉矩控制算法






 工商網監
工商網監
評論