 使用MM32F0160 FlexCAN-FD接口實現CAN FD通信
使用MM32F0160 FlexCAN-FD接口實現CAN FD通信
1?FlexCAN-FD簡介
MM32F0160 系列 MCU 具有一個 FlexCAN 模塊,該模塊遵循 ISO 11898-1 標準、 CAN FD 和 CAN 2.0B 協議規范,不僅兼容傳統CAN,還支持CAN FD模式。在CAN-FD模式下,可實現最高8 Mbps的FD模式通信速率,支持標準幀(11位標識符)和擴展幀(29位標識符),支持最大64字節有效負載,并且具有非常靈活的用于傳輸和接收的郵箱系統。
使用CAN FD較傳統CAN具有如下優點:
(1)增加了數據長度,在發送長數據時,軟件更加簡單高效,滿足更高的數據吞吐量。
(2)提高了傳輸速率,使得延遲時間更短,具有更好的實時性,滿足更高的帶寬。
(3)擴展了CRC場,為數據內容提供了更好的保護,增加了系統安全性。
本章節初步學習使用MM32F0160 FlexCAN-FD接口實現CAN FD通信,相關例程參考靈動官網的LibSamples或在此基礎上修改。關于CAN FD協議不再進行詳細介紹,感興趣的小伙伴可以查閱相關資料增進了解。
2?CAN FD幀
ISO 11898-1標準指定了符合ISO 11898-1(2003)標準的經典幀格式,并引入了CAN FD(Flexible Data Rate)幀格式。經典幀格式支持高達1Mbps的比特率,以及每幀8字節的有效負載。FD幀格式支持超過1Mbps的比特率,以及每幀超過8字節的有效負載。FlexCAN可以收發CAN FD和經典CAN格式交替的報文。
CAN FD 幀中有三個附加的控制位:
EDL:擴展數據長度位,支持更多的數據負載。
BRS比特率切換位:決定CAN FD幀是否切換比特率。
ESI錯誤狀態指示:錯誤主動節點發送顯性,錯誤被動節點發送隱性。
CAN FD格式不支持遠程幀,遠程幀總是以經典CAN格式傳輸。接收到FD幀并匹配郵箱時,接收報文緩沖區的RTR位將被無效化。
CAN FD報文數據字段可超過8字節,支持12至64字節。CAN FD報文可切換比特率,使CAN幀的控制字段、數據字段和CRC字段比特率高于幀的開始和結束。
CAN FD幀結構(部分)如下圖所示:
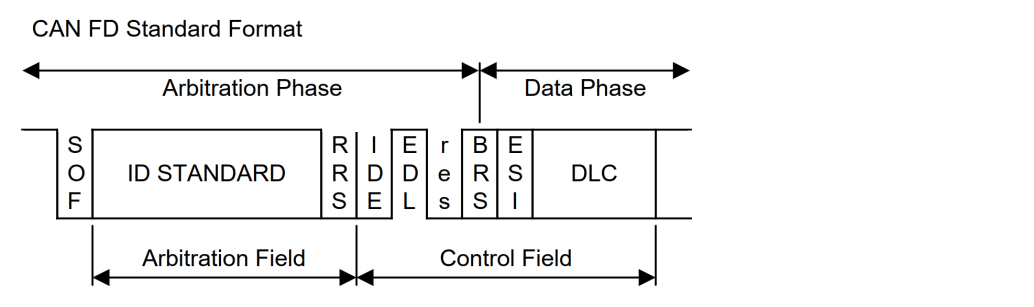
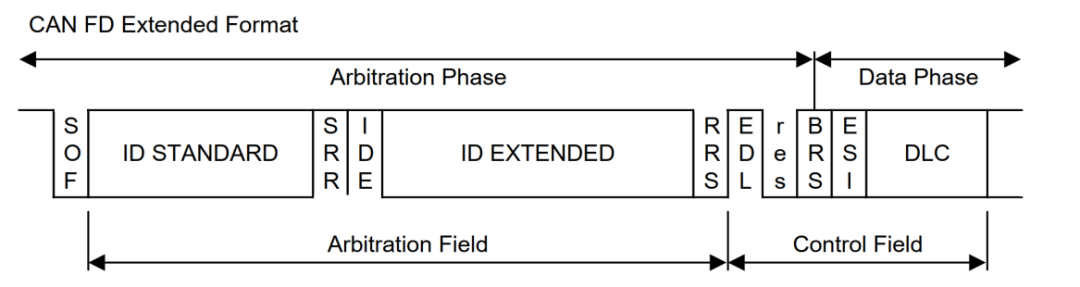
CAN FD幀從SOF(幀起始)到BRS的仲裁段,以標稱比特率傳輸;從BRS到CRC界定符的數據段,以數據比特率傳輸;從CRC界定符到Intermission位,傳輸恢復為標稱比特率。如果CAN FD幀中BRS為隱性,則位時序在BRS的采樣點發生變化。BRS位之前,CAN FD仲裁段的標稱位時序由CAN_CBT或CAN_CTRL1寄存器定義;檢測到隱性BRS時,數據位時序由CAN_FDCBT 寄存器定義。
3?協議時序
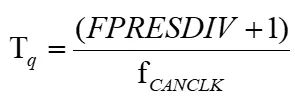
FlexCAN具有單獨配置CAN FD協議時序的寄存器,CAN FD位時序寄存器(CAN_FDCBT)存儲用于控制位時序參數的字段:FPRESDIV、FPROPSEG、FPSEG1、FPSEG2和FRJW。
CAN FD報文數據段的FDPRESDIV定義了串行時鐘(Sclock)的預分頻,見下列方程。串行時鐘的周期定義了用于構成CAN FD波形的時間單位Tq,Tq為CAN引擎所能處理的最小時間單元。
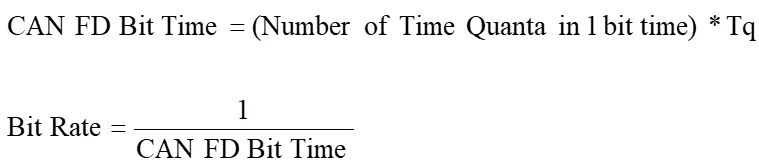
比特率定義了接收或傳輸 CAN FD報文的速率,公式如下:
位時間可以細分為三個部分:
同步段(SYNC_SEG):1Tq的固定長度;信號邊沿出現在該段內。
時間段1:包括傳播段和相位段1。FlexCAN 使用 CAN_FDCBT寄存器的FDPROPSEG和FDPSEG1字段,其總和(+1)為2 ~ 39Tq。
時間段 2:包括相位段2。其值(+1)為2 ~ 8Tq。時間段2不能小于信息處理時間2Tq。
當采用CAN FD位作為持續時間的衡量標準時,一個CAN FD位的外設時鐘個數NumClkBit為:

fCANFDCLK為PE時鐘,單位Hz。
fSYS為系統(CHI)時鐘頻率,單位Hz。
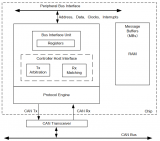
4?報文緩沖區
MM32F0160 FlexCAN遵循CAN FD協議規范,該模塊已經設計了對應的CAN FD報文緩沖區結構。經典 CAN 幀使用傳統型 Rx FIFO,CAN FD幀使用增強型Rx FIFO。下圖為FlexCAN所使用的報文緩沖區結構,包括CAN 2.0B的兩種幀格式:擴展幀(29位ID)和標準幀(11位ID)。每個報文緩沖區由16、24、40或72字節組成,其中包括8、16、32或64字節的數據。郵箱使用 0x80 ~ 0x27F 的內存區域。
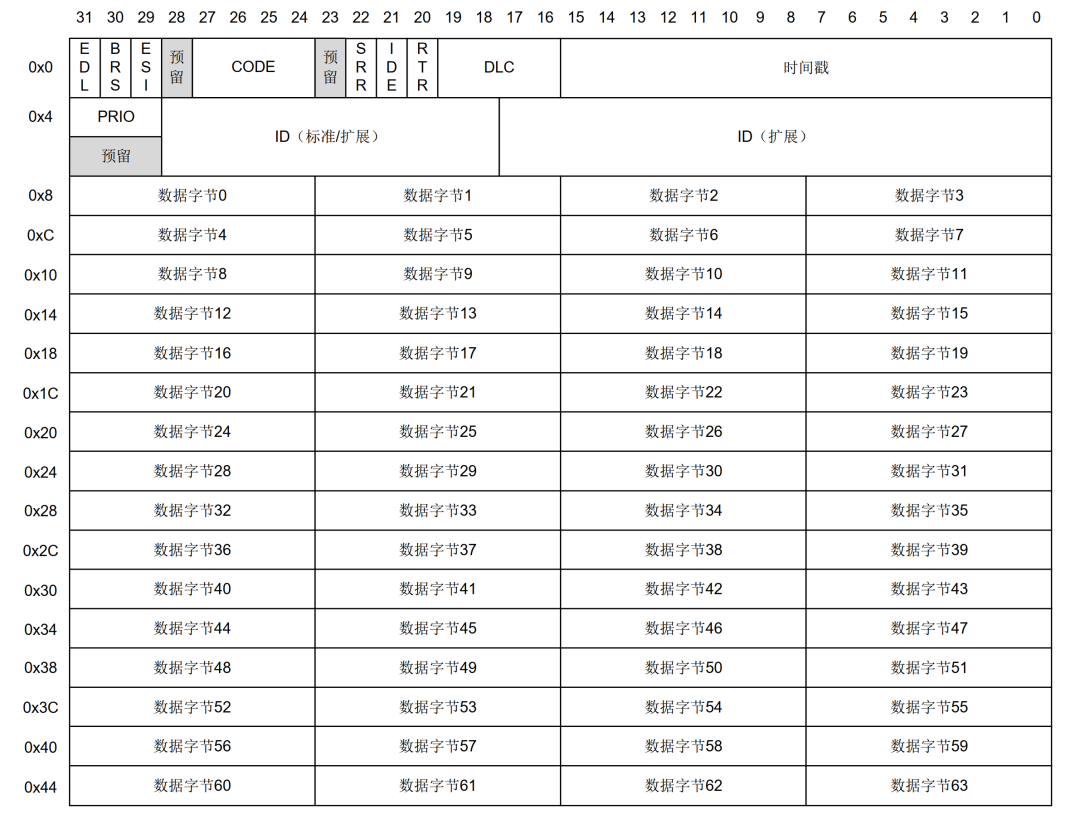
EDL — 擴展數據長度,EDL位區分CAN幀和CAN FD 幀。
BRS — 比特率切換,定義是否在 CAN FD 幀內切換比特率。
ESI — 錯誤狀態指示,表示發送節點是錯誤主動還是錯誤被動。
CODE — 報文緩沖區代碼,CODE 字段可以被 CPU 和 FlexCAN 讀寫,用作報文緩沖區匹配和仲裁過程的一部分。編碼詳見用戶手冊。
SRR — 替代遠程請求,
1:擴展幀格式傳輸時,必須使用隱性位。
0:擴展幀格式傳輸時,顯性位無效。
只用于擴展幀格式。傳輸時(發送緩沖區)該位必須設置為 1,且將會和從 CAN 總線上接收到的值一起存儲于接收緩沖區。該位可以被接收為隱性或顯性,如果 FlexCAN 以顯性位接收,則認為仲裁丟失。
IDE — ID擴展位,
1:擴展幀;
0:標準幀。
RTR — 遠程傳輸請求
1:如果是發送MB,則表示當前MB可能有一個遠程幀待發送;如果是接收MB,則接收到的遠程幀將會被存儲;
0:表示當前的M 中有一個數據幀待傳輸。在接收MB中,可能會被用于匹配過程。
如果FlexCAN傳輸1(隱性),接收到0(顯性),則認為仲裁丟失。如果 RTR傳輸0(顯性),接收到1(隱性),則認為是位錯誤。如果接收到的值與發送值相同,則被認為是一次成功的位傳輸。
注:配置CAN FD幀時RTR位必須為0。
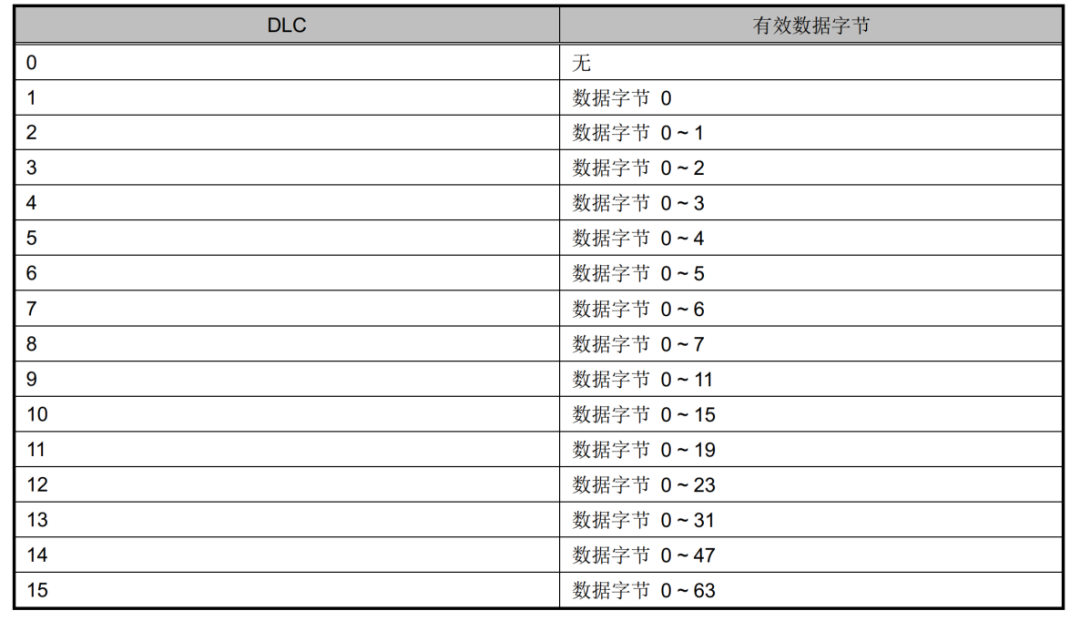
DLC — 數據字節長度
該4位字段為發送/接收數據的長度(以字節為單位),位于偏移地址為0x8到0xF的MB空間。
接收階段,該字段由FlexCAN寫入,從接收幀的DLC字段復制而得;
傳輸階段,該字段由CPU寫入,且與要傳輸的幀的DLC字段相對應。
當RTR = 1 時,被傳輸的幀為遠程幀,不包含數據字段(DLC 字段的設置無效,參見表格“有效數據字節”)。
TIME STAMP — 自由運行計時器時間戳
該16位字段為自由運行計時器的復制,當標識符字段開頭出現在CAN總線上時進行捕獲。
PRIO — 本地優先級
該 3 位字段只有當MCR.LPRIO_EN被置位時才有效,且只針對傳輸郵箱。用于附加到 ID 來定義傳輸優先級,不會被傳輸。
ID — 幀標識符
標準幀格式,只有高 11 位(28 ~ 18)用于識別接收或發送幀,忽略低 18 位。擴展幀格式,所有位都用于識別傳輸或接收幀。
DATA BYTE0 ~ 63 — 數據字段
數據幀最多可以使用64個字節,取決于為MB選擇的有效負載大小。從總線上接收到的幀以該幀被接收時的格式進行存放。只有n小于DLC時,DATA BYTE(n)才有效。
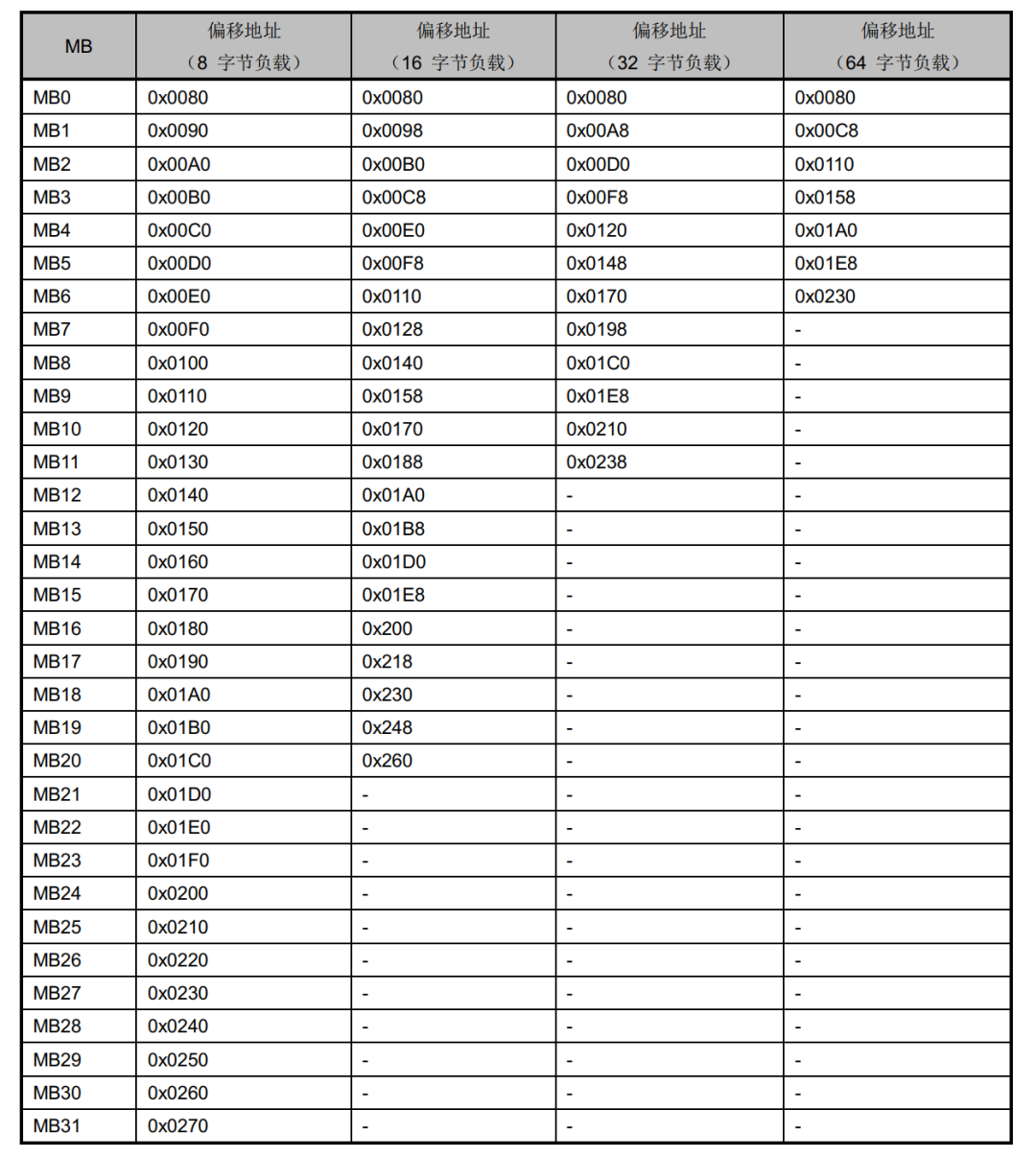
5?MB 內存映射
FlexCAN內存緩沖區的內存映射如下表所示:
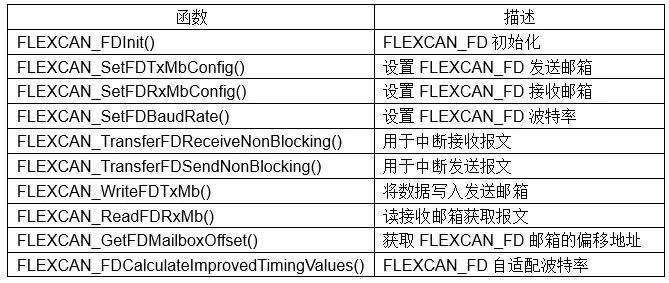
6?FlexCAN-FD API
從靈動官網下載的FLEXCAN固件庫中定義了FD相關的API函數如下:
7?FlexCAN-FD通信
配置FlexCAN為CAN FD模式,通過中斷接收和發送報文。
7.1 FlexCAN配置
voidFlexCAN_Configure(void)
{
GPIO_InitTypeDefGPIO_InitStruct;
NVIC_InitTypeDefNVIC_InitStruct;
flexcan_config_tFlexCAN_ConfigStruct;
flexcan_rx_mb_config_tFlexCAN_RxMB_ConfigStruct;
RCC_ClocksTypeDefRCC_Clocks;
RCC_GetClocksFreq(&RCC_Clocks);
RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1ENR_FLEXCAN,ENABLE);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource8,GPIO_AF_3);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource9,GPIO_AF_3);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_8;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_FLOATING;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOB,&GPIO_InitStruct);
NVIC_InitStruct.NVIC_IRQChannel=FLEX_CAN_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPriority=0;
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStruct);
FLEXCAN_GetDefaultConfig(&FlexCAN_ConfigStruct);
FlexCAN_ConfigStruct.baudRate=1000000U;/*1Mbps*/
FlexCAN_ConfigStruct.baudRateFD=2000000U;/*2Mbps*/
FlexCAN_ConfigStruct.clkSrc=Enum_Flexcan_ClkSrc1;
FlexCAN_ConfigStruct.enableLoopBack=false;
FlexCAN_ConfigStruct.disableSelfReception=true;
FlexCAN_ConfigStruct.enableIndividMask=true;
FLEXCAN_Init(FLEX_CAN1,&FlexCAN_ConfigStruct);
FLEXCAN_EnterFreezeMode(FLEX_CAN1);
FLEX_CAN1->MCR|=1<CTRL1&=(~CAN_CTRL1_SMP(1));
FLEXCAN_ExitFreezeMode(FLEX_CAN1);
/*Baudratecalculatebyautomatically*/
FLEXCAN_FDCalculateImprovedTimingValues(FlexCAN_ConfigStruct.baudRate,FlexCAN_ConfigStruct.baudRateFD,
RCC_Clocks.PCLK1_Frequency,&FlexCAN_ConfigStruct.timingConfig);
FLEXCAN_FDInit(FLEX_CAN1,&FlexCAN_ConfigStruct,FLEXCAN_64BperMB,true);
FLEXCAN_SetFDTxMbConfig(FLEX_CAN1,1,true);
FLEXCAN_SetFDTxMbConfig(FLEX_CAN1,3,true);
FlexCAN_RxMB_ConfigStruct.id=FLEXCAN_ID_STD(0x111);
FlexCAN_RxMB_ConfigStruct.format=Enum_Flexcan_FrameFormatStandard;
FlexCAN_RxMB_ConfigStruct.type=Enum_Flexcan_FrameTypeData;
FLEXCAN_SetFDRxMbConfig(FLEX_CAN1,0,&FlexCAN_RxMB_ConfigStruct,true);
FLEXCAN_SetRxIndividualMask(FLEX_CAN1,0,FLEXCAN_RX_MB_STD_MASK(0xFFF,0,0));
/*EnableMB0Interrupt*/
FLEX_CAN1->IMASK1|=(0x01U<IMASK1|=(0x01U<
配置PB8、PB9復用為FlexCAN的RX、TX引腳;
配置CAN1Mbps和CANFD2Mbps、MB選擇64字節負載;
配置NVIC中斷;
配置MB1、MB3為發送郵箱;
配置MB0、MB2為接收郵箱;
MB0僅接收ID為0x111的標準幀;
MB2僅接收ID為0x222的擴展幀。
7.2 發送標準幀報文
voidFlexCAN_FD_SendStandardFrameMessage(uint32_tID,uint8_t*Buffer,uint8_tLength)
{
flexcan_fd_frame_tFlexCAN_FD_FrameStruct;
FlexCAN_FD_FrameStruct.length=Length;
FlexCAN_FD_FrameStruct.type=(uint8_t)Enum_Flexcan_FrameTypeData;
FlexCAN_FD_FrameStruct.format=(uint8_t)Enum_Flexcan_FrameFormatStandard;
FlexCAN_FD_FrameStruct.brs=1;
FlexCAN_FD_FrameStruct.edl=1;
FlexCAN_FD_FrameStruct.id=ID;
for(uint8_ti=0;i
flexcan_fd_frame_t是按照FlexCAN MB結構定義的結構體,將要發送的標準幀按照幀結構依次設置結構體的各字段,接著寫入MB1發送郵箱。
7.3 發送擴展幀報文
voidFlexCAN_FD_SendExtendFrameMessage(uint32_tID,uint8_t*Buffer,uint8_tLength)
{
flexcan_fd_frame_tFlexCAN_FD_FrameStruct;
FlexCAN_FD_FrameStruct.length=Length;
FlexCAN_FD_FrameStruct.type=(uint8_t)Enum_Flexcan_FrameTypeData;
FlexCAN_FD_FrameStruct.format=(uint8_t)Enum_Flexcan_FrameFormatExtend;
FlexCAN_FD_FrameStruct.brs=1;
FlexCAN_FD_FrameStruct.edl=1;
FlexCAN_FD_FrameStruct.id=ID;
for(uint8_ti=0;i
同上,將要發送的擴展幀按照幀結構依次設置結構體的各字段,接著寫入MB3發送郵箱。
7.4 獲取報文并發送
voidFlexCAN_FD_RxMB_Handler(uint8_tIndex)
{
uint8_tBuffer[64];
flexcan_fd_frame_tFlexCAN_FD_FrameStruct;
FLEXCAN_ReadFDRxMb(FLEX_CAN1,Index,&FlexCAN_FD_FrameStruct);
for(uint8_ti=0;i>0x18)&0xFF;
Buffer[i*4+1]=(FlexCAN_FD_FrameStruct.dataWord[i]>>0x10)&0xFF;
Buffer[i*4+2]=(FlexCAN_FD_FrameStruct.dataWord[i]>>0x08)&0xFF;
Buffer[i*4+3]=(FlexCAN_FD_FrameStruct.dataWord[i]>>0x00)&0xFF;
}
if(Index==0)
{
FlexCAN_FD_SendStandardFrameMessage((FlexCAN_FD_FrameStruct.id>>CAN_ID_STD_SHIFT),Buffer,FlexCANFD_TX_64Bytes_DataLen);
}
else
{
FlexCAN_FD_SendExtendFrameMessage((FlexCAN_FD_FrameStruct.id>>CAN_ID_EXT_SHIFT),Buffer,FlexCANFD_TX_64Bytes_DataLen);
}
}
讀接收郵箱(Index),獲取CAN FD報文中的數據,并發送該報文。
7.5 中斷服務子程序
voidFlexCAN_IRQHandler(void)
{
uint32_tu32flag=1;
/*MB0*/
if(FLEXCAN_GetMbStatusFlags(FLEX_CAN1,u32flag<
MB0、MB2完成接收調用MB接收函數,獲取報文并通過MB1、MB3發送。MB1、MB3完成傳輸,清除對應標志。
7.6 FlexCAN_FD中斷示例
voidFlexCAN_FD_Interrupt_Sample(void)
{
uint8_tBuffer[64]=
{
0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x0A,0x0B,0x0C,0x0D,0x0E,0x0F,0xAA,
0xAA,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x0A,0x0B,0x0C,0x0D,0x0E,0x0F,0x55,
0x55,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x0A,0x0B,0x0C,0x0D,0x0E,0x0F,0xAA,
0xAA,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x0A,0x0B,0x0C,0x0D,0x0E,0x0F,0x88,
};
printf("
Test%s",__FUNCTION__);
FlexCAN_Configure();
while(1)
{
FlexCAN_FD_SendStandardFrameMessage(0x214,Buffer,FlexCANFD_TX_64Bytes_DataLen);
PLATFORM_LED_Toggle(LED1);
PLATFORM_DelayMS(1000);
}
}
調用FlexCAN_Configure(),在while中間隔1s中發送標準幀報文,幀ID為0x214,數據為定義好的Buffer[64]。
在主函數中調用FlexCAN_FD_Interrupt_Sample()。
8?驗證
連接CAN調試工具,配置波特率CAN 1Mbps、CAN FD 2Mbps,觀測上位機軟件:
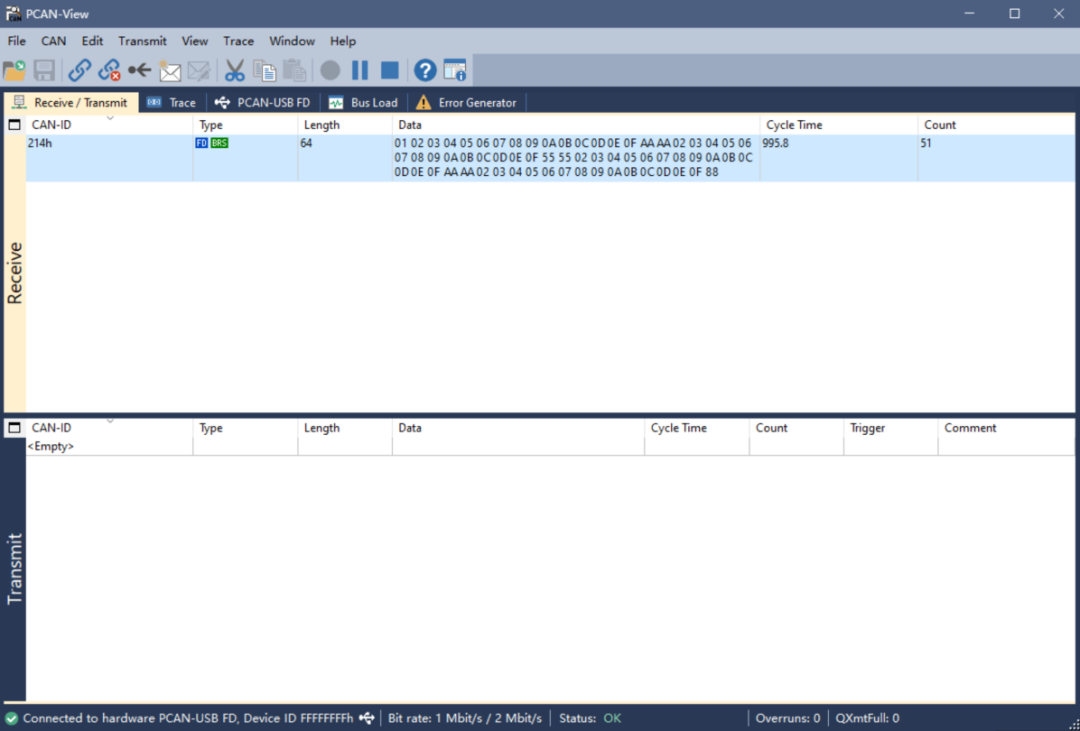
接收區間隔1s接收到一次FD報文,ID為0x214。
在發送區發送標準幀FD報文,ID為0x111,發送擴展幀FD報文,ID為0x222,各發送5次:
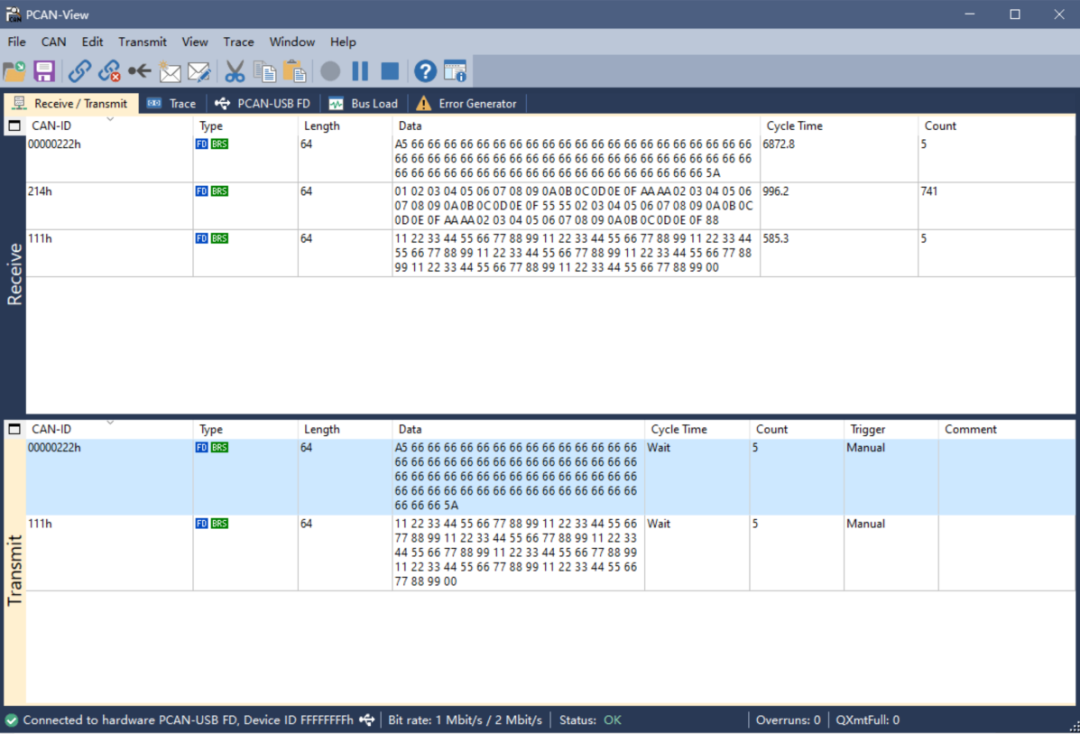
每發送1次報文,接收區接收到1次該ID的報文,和程序預期一致。
審核編輯:湯梓紅
-
mcu
+關注
關注
146文章
17019瀏覽量
350371 -
接口
+關注
關注
33文章
8526瀏覽量
150860 -
CAN
+關注
關注
57文章
2720瀏覽量
463395 -
通信
+關注
關注
18文章
5977瀏覽量
135869 -
比特率
+關注
關注
1文章
28瀏覽量
10599
原文標題:靈動微課堂 (第279講)|MM32F0160 FlexCAN-FD 通信
文章出處:【微信號:MindMotion-MMCU,微信公眾號:靈動MM32MCU】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何實現CAN到CAN FD的升級?
MM32F0160的FlexCAN FD位時間采樣點如何計算?
一文淺析汽車CAN-FD總線的通信應用
S32G2 FlexCAN CAN FD使用DMA接收字節順序錯誤的原因?怎么解決?
can總線一幀多少字節多少位_MCU擴展CAN/CAN FD接口方案MCP2518FD+ATA6563






 工商網監
工商網監
評論