") 線陣相機與面陣相機的區(qū)別
線陣相機與面陣相機的區(qū)別
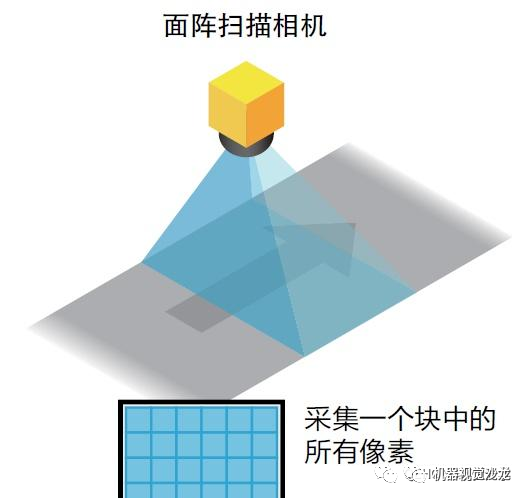
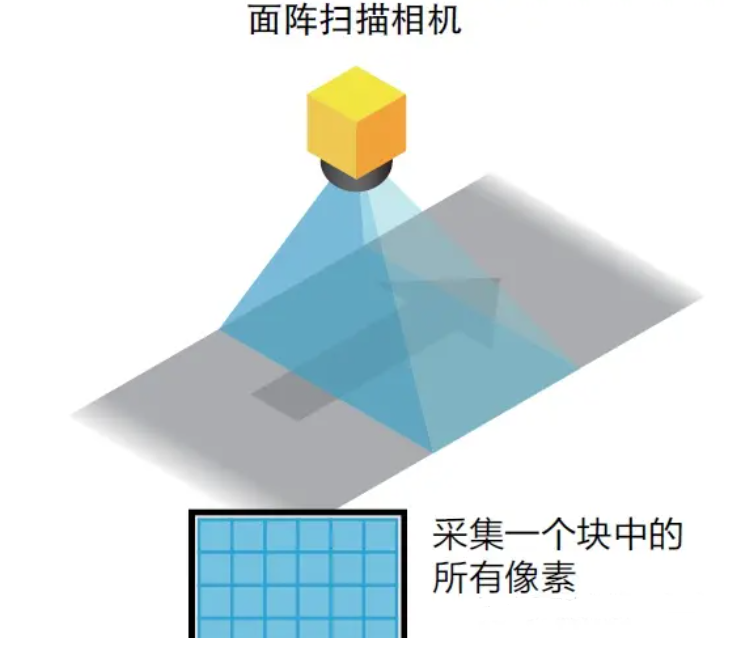
工業(yè)相機是機器視覺系統(tǒng)必不可少的核心組件,根據(jù)不同的類別有不同的分類標(biāo)準(zhǔn)。按傳感器的結(jié)構(gòu)特性分類,可分為面陣相機與線陣相機兩種。其中,面陣相機是以面為單位來進(jìn)行圖像采集,可以一次性獲取完整的目標(biāo)圖像,并能及時進(jìn)行圖像采集的相機。在目標(biāo)物體的形狀、尺寸,位置等方面的應(yīng)用上發(fā)揮著至關(guān)重要的成像作用。
隨著技術(shù)的發(fā)展和需要,面陣相機按照其圖像傳感器的結(jié)構(gòu)或排列方式的不同,分為幀轉(zhuǎn)移、隔列轉(zhuǎn)移、線轉(zhuǎn)移以及全幀轉(zhuǎn)移四種類型,每種類型都有著各自的特點。
類型區(qū)分
面陣相機:實現(xiàn)的是像素矩陣拍攝。相機拍攝圖像中,表現(xiàn)圖像的細(xì)節(jié)由分辨率決定,而分辨率是由鏡頭焦距決定的。同一種相機選用不同焦距的鏡頭,分辨率就不同。像素的多少不決定圖像的分辨率,那么大像素相機有何好處?其實是可以減少拍攝次數(shù),提高測試速度。
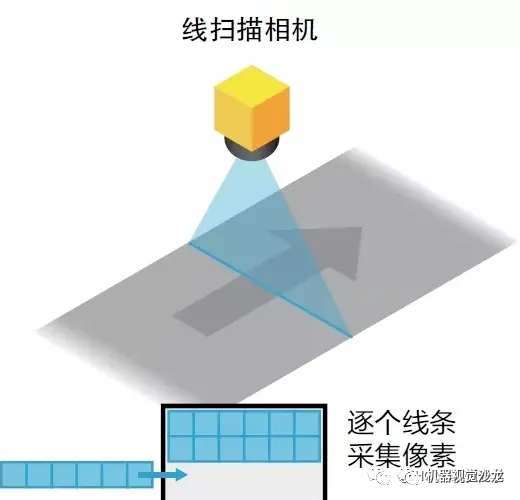
線陣相機:顧名思義是呈“線”狀的。雖然也是二維圖像,但有幾K的長度,而寬度卻只有幾個象素的而已。一般上只在兩種情況下使用這種相機
(1)、被測視野為細(xì)長的帶狀,多用于滾筒上檢測的問題。
(2)、需要極大的視野或極高的精度。
在第二種情況下需要用激發(fā)裝置多次激發(fā)相機,進(jìn)行多次拍照,再將拍下的多幅“條”形圖象,合并成一張巨大的圖。因此,用線陣型相機,必須用可以支持線陣型相機的采集卡。一般相機的圖象是?400K~1M,而合并后的圖象有幾個M這么大,在這種情況下,其檢測速度自然比較慢,所以線陣相機只用在極特殊的情況下。
應(yīng)用對比
面陣相機:應(yīng)用面較廣,如面積、形狀、尺寸、位置,甚至溫度等的測量。
線陣相機:主要應(yīng)用于工業(yè)、醫(yī)療、科研與安全領(lǐng)域的圖象處理。被檢測的物體通常勻速運動 ,?利用一臺或多臺相機對其逐行連續(xù)掃描?,對其整個表面均勻檢測。可以對其圖象一行一行進(jìn)行處理 , 也可以對由多行組成的面陣圖象進(jìn)行處理
優(yōu)缺點對比
面陣相機:
優(yōu)點:可以獲取二維圖像信息,測量圖像直觀。
缺點:像元總數(shù)多,而每行的像元數(shù)一般較線陣少,幀幅率受到限制,因此其應(yīng)用面較廣,如面積、形狀、尺寸、位置,甚至溫度等的測量。由于生產(chǎn)技術(shù)的制約,單個面陣的面積很難達(dá)到一般工業(yè)測量現(xiàn)場的需求。
線陣相機:
優(yōu)點:一維像元數(shù)可以做得很多,而總像元素較面陣相機少,而且像元尺寸比較靈活,幀幅數(shù)高,特別適用于一維動態(tài)目標(biāo)的測量。
缺點:要用線陣獲取二維圖像,必須配以掃描運動,而且為了能確定圖像每一像素點在被測件上的對應(yīng)位置,還必須配以光柵等器件以記錄線陣每一掃描行的坐標(biāo)。線陣獲取圖像獲取時間長,測量效率低;另外受掃描運動及相應(yīng)的位置影響,系統(tǒng)復(fù)雜性和成本也有所提升增加;圖像精度還可能受掃描運動精度的影響而影響測量精度。
線陣相機和鏡頭的選型
計算分辯率:幅寬除以最小檢測精度得出每行需要的像素
選定相機:幅寬除以像素數(shù)得出實際檢測精度
每秒運動速度長度除以精度得出每秒掃描行數(shù)
根據(jù)以上數(shù)值選定相機
如幅寬為1600毫米、精度1毫米、運動速度22000mm/s
相機:1600/1=1600像素
最少2000像素,選定為2k相機
1600/2048=0.8實際精度
22000mm/0.8mm=27.5KHz
應(yīng)選定相機為2048像素28kHz相機
線陣鏡頭的選型
為什么在選相機時要考慮鏡頭的選型呢?常見的線陣相機分辨率目前有1K,2K,4K,6K,7K,8K,12K幾種,象素大小有5um,7um,10um,14um幾種,很顯然,C接口遠(yuǎn)遠(yuǎn)不能滿足要求,因為C接口最大只能接22 mm的芯片,也就是1.3inch。而很多相機的接口為F,M42X1,M72X0.75等,不同的鏡頭接口對應(yīng)不同的后背焦,也就決定了鏡頭的工作距離不一樣。
(1)、光學(xué)放大倍率
確定了相機分辨率和像素大小,就可以計算出芯片尺寸(Sensor size);芯片尺寸除以視野范圍(FOV)就等于光學(xué)放大倍率。β=CCD/FOV
(2)、接口
主要有C、M42x1 、F、T2、Leica、M72x0.75等幾種,確定了之后,就可知道對應(yīng)接口的長度。
(3)、后背焦
后背焦指相機接口平面到芯片的距離,是一個非常重要的參數(shù),由相機廠家根據(jù)自己的光路設(shè)計確定。不同廠家的相機,哪怕是接口一樣,也可能有不同的后背焦。
面陣相機和鏡頭選型
已知:被檢測物體大小為A*B,要求能夠分辨小于C,工作距為D
(1)計算短邊對應(yīng)的像素數(shù) E = B/C,相機長邊和短邊的像素數(shù)都要大于E;
(2)像元尺寸 = 物體短邊尺寸B / 所選相機的短邊像素數(shù);
(3)放大倍率 = 所選相機芯片短邊尺寸 / 相機短邊的視野范圍;
(4)可分辨的物體精度 = 像元尺寸 / 放大倍率 (判斷是否小于C);
(5)物鏡的焦距 = 工作距離 / (1+1 / 放大倍率) 單位:mm;
(6)像面的分辨率要大于 1 / (2*0.1*放大倍率) 單位:lpmm ;
以上只針對鏡頭的主要參數(shù)進(jìn)行計算選擇,其他如畸變、景深環(huán)境等,可根據(jù)實際要求進(jìn)行選擇。
針對速度和曝光時間的影響,物體是否有拖影
已知:確定每次檢測的范圍為80mm*60mm,200萬像素 CCD 相機(1600*1200),相機或物體的運動速度為12m/min = 200mm/s 。
曝光時間計算:(1) 曝光時間 < 長邊視野范圍 / (長邊像素值 * 產(chǎn)品運動速度)
(2) 曝光時間 < 80 mm / (1600?250 mm/s);(3) 曝光時間 < 0.00025s ;
總結(jié):故曝光時間要小于 0.00025s ,圖像才不會產(chǎn)生拖影。
審核編輯:湯梓紅
-
機器視覺
+關(guān)注
關(guān)注
161文章
4342瀏覽量
120105 -
工業(yè)相機
+關(guān)注
關(guān)注
5文章
315瀏覽量
23592 -
線陣相機
+關(guān)注
關(guān)注
0文章
21瀏覽量
942
原文標(biāo)題:線陣相機與面陣相機的區(qū)別與選型
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
線陣相機和面陣相機的區(qū)別 線陣相機原理技術(shù)應(yīng)用分析圖
線陣相機與面陣相機的區(qū)別與選型
機器視覺線陣相機原理和應(yīng)用
OPT(奧普特)產(chǎn)品介紹之面陣系列工業(yè)相機
工業(yè)面陣相機和線陣相機的異同點分析
工業(yè)面陣相機和線陣相機的應(yīng)用對比和選型
為什么需要使用線陣相機 線陣相機與面陣相機的區(qū)別
面陣相機和線陣相機的區(qū)別
工業(yè)面陣相機成像原理及分類

工業(yè)面陣相機成像原理及分類







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論