 多核一芯、一芯多系統!機器人主控選D9350核心板
多核一芯、一芯多系統!機器人主控選D9350核心板
在當今數字化時代,嵌入式系統得到快速發展,機器人、人工智能、ChatGPT的頻率越來越高,工業智能系統對基于智能芯片上的處理能力和處理速度的需求更為強勁。傳統基于CPU的處理器已經不能滿足各項智能任務的要求,智能控制SoC芯片的橫空出世,已經成為眾多智能終端設備的首選,智能控制SoC芯片的多核異構結構能夠配合人工智能算法進行深度耦合,獲取更高效能和更復雜算法的支持,為智能AI、人工智能、機器人的應用夯實了基礎。而芯馳D9350這款國產多核異構SoC,正適合應用到機器人場景,米爾作為嵌入式處理器模組廠商,也推出了基于芯馳D9350的核心板和開發板,助力開發者賦能智能機器人應用。
多核一芯、一芯多系統
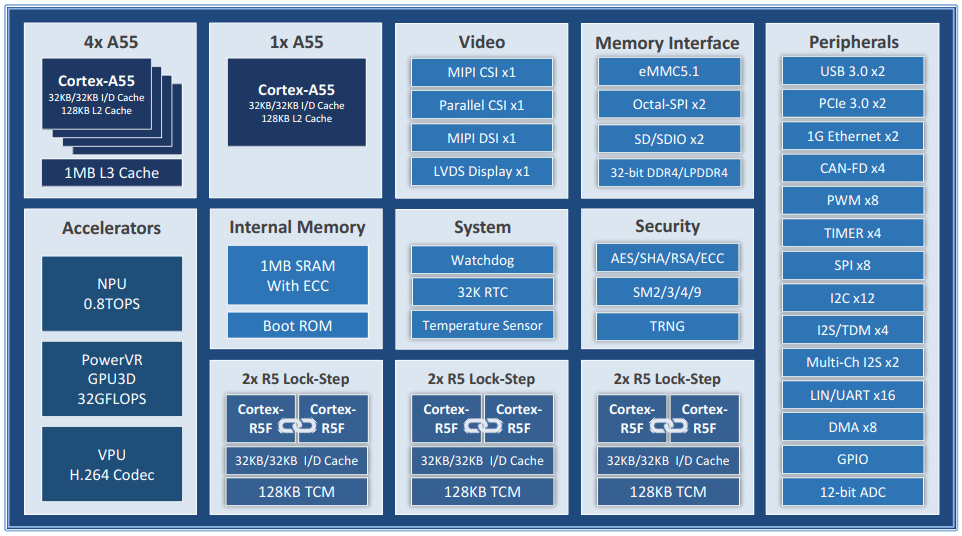
機器人主控方案需要更強大和全面的性能,一般采用Android+Linux+ros系統的操作,需要3顆獨立的芯片支撐整個操作系統,存在兼容難度大、成本較高等問題。而芯馳D9350擁有高集成度、高算力、高效率、高處理能力、高接入能力以及高安全等六大產品制高點,實現了CPU、NPU、GPU、MCU“四芯合一”,且配備5*Cortex-A55內核,支持RT-LINUX+安卓和ubuntu系統+RTOS系統等多個操作系統并行,真正實現“多核一芯、一芯多系統”,芯馳D9350以其高集成度提升系統性價比,降低部署難度。



 ?
?
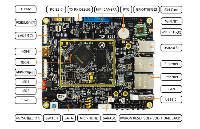
芯馳D9350具備多種高速相機接口、總線接口:
1、支持4 lane MIPI-CSI,可直接接入800W像素相機,或者通過解串芯片接入4路GMSL、FPDLINK、AHD攝像頭。
2、支持千兆以太網TSN和USB3.0高速接口,可以選擇200W~4800W像素工業相機,選擇廣泛。
3、支持4路CANFD接口,16路UART、12路I2C、8路SPI、8路PWM、12bit ADC、100+ GPIO端口。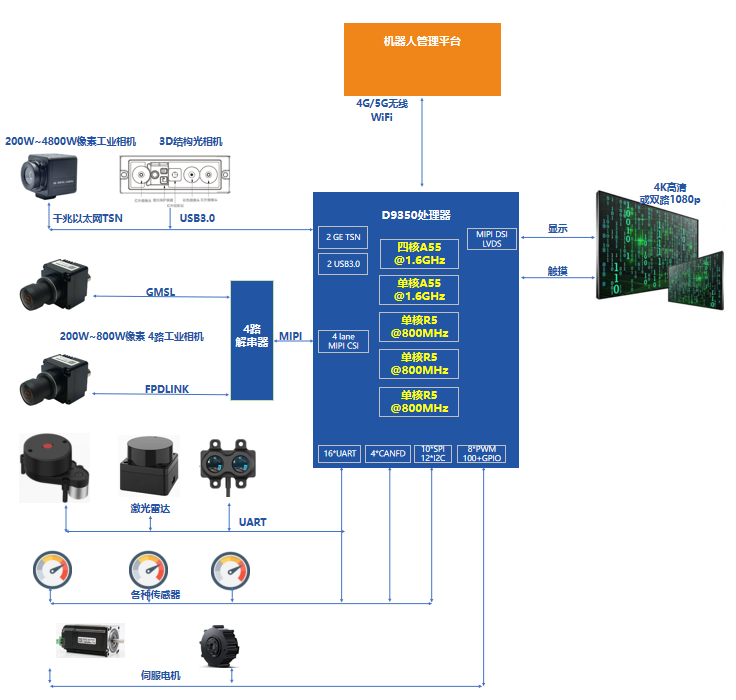 ?
?
機器人ROS系統適配
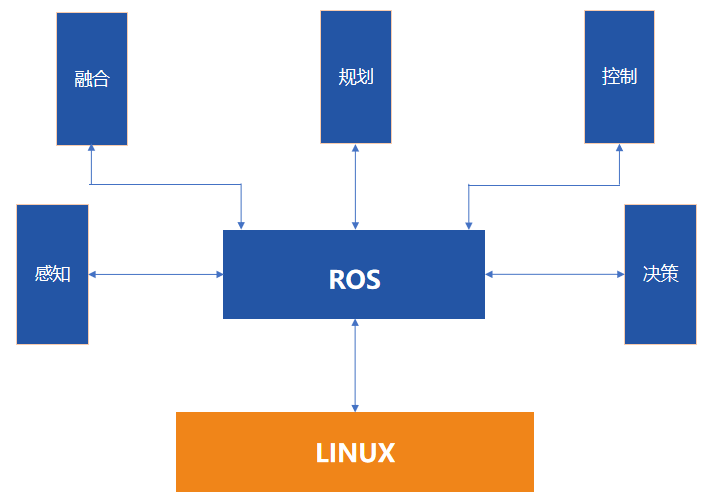
米爾的芯馳D9350平臺,基于Ubuntu操作系統,運行ROS機器人應用框架,提供了一套完整的工具和庫,包括消息傳遞、通信機制、軟件包管理、調試和可視化等功能,實現機器人管控。ROS全稱Robot Operating System,是一個適用于機器人編程的框架,這個框架把原本松散的零部件耦合在了一起,為他們提供了通信架構。ROS雖然叫做操作系統,但它只是連接了操作系統和開發的ROS應用程序,所以也算是一個中間件,是一套軟件庫和工具,基于ROS的應用程序之間建立起了溝通的橋梁,所以也是運行在Linux上的運行環境,在這個環境上,機器人的感知、決策、控制算法可以更好的組織和運行。ROS就是介于底層操作系統(如Linux)和上層業務應用軟件(如OpenCV)之間的中間件。簡單來說:ROS=通訊機制+工具軟件包+機器人應用功能+機器人生態系統,使得機器人控制系統的開發更加高效和可靠。
 ?
?
ROS2優化的通訊機制
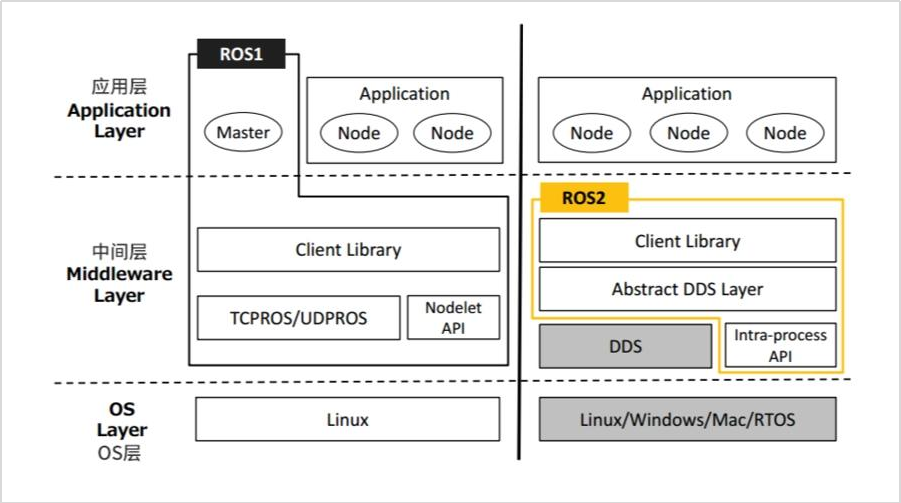 ROS2和ROS1的系統架構框圖對比由下往上看,在操作系統層,ROS2比ROS1支持的底層操作系統更多,也支持實時操作系統(RTOS)了。這就讓ROS2可以支持更多樣化的嵌入式硬件,例如機器人應用中一些輕量化的ECU。在中間層,ROS1更多地依賴TCP和UDP協議,而在ROS2中則引入了DDS。DDS全稱是Data Distribution Service 數據分發服務,是一種分布式實時通信中間件協議,也是一個被很多公司實現的工業標準。DDS采用發布/訂閱體系架構,強調以數據為中心,提供豐富的服務質量(QoS)策略,以保障數據進行實時、高效、靈活地分發。正是基于DDS的通訊機制,ROS的應用層就不再需要Master節點。節點之間采用自發現機制,找到彼此,進而建立穩定的通信連接。這對于滿足功能安全需求,有很大幫助。當然,ROS1和ROS2的應用層軟件接口是匹配的,讓ROS1上開發的應用軟件能快速復用部署到ROS2上,也是ROS2的設計目標。?
ROS2和ROS1的系統架構框圖對比由下往上看,在操作系統層,ROS2比ROS1支持的底層操作系統更多,也支持實時操作系統(RTOS)了。這就讓ROS2可以支持更多樣化的嵌入式硬件,例如機器人應用中一些輕量化的ECU。在中間層,ROS1更多地依賴TCP和UDP協議,而在ROS2中則引入了DDS。DDS全稱是Data Distribution Service 數據分發服務,是一種分布式實時通信中間件協議,也是一個被很多公司實現的工業標準。DDS采用發布/訂閱體系架構,強調以數據為中心,提供豐富的服務質量(QoS)策略,以保障數據進行實時、高效、靈活地分發。正是基于DDS的通訊機制,ROS的應用層就不再需要Master節點。節點之間采用自發現機制,找到彼此,進而建立穩定的通信連接。這對于滿足功能安全需求,有很大幫助。當然,ROS1和ROS2的應用層軟件接口是匹配的,讓ROS1上開發的應用軟件能快速復用部署到ROS2上,也是ROS2的設計目標。?
ROS中的生態系統
綜上,米爾芯馳D9350的核心板為機器人控制產品提供了高性能計算、多媒體處理和通信功能,有助于實現更智能、更靈活和更高效的工業自動化。米爾電子提供底板的原理圖和PCB工程,可以根據提供工程需求來實現真正意義上的裁剪,定制開發屬于自己的產品,米爾還提供配套的芯馳D9350開發板用于評估,助力企業客戶開發成功。
-
芯片
+關注
關注
453文章
50387瀏覽量
421783 -
機器人
+關注
關注
210文章
28191瀏覽量
206505 -
嵌入式系統
+關注
關注
41文章
3564瀏覽量
129224 -
核心板
+關注
關注
5文章
989瀏覽量
29710
發布評論請先 登錄
相關推薦
米爾國產全志T536系列核心板開發板-產品手冊
迅為LPDDR5版本瑞芯微RK3588核心板8GB內存32GB存儲升級版本
探索巔峰性能 |迅為瑞芯微RK3588開發板/核心板深度剖析
兼容7A100T和PG2L100H雙芯核心板,米爾FPGA平臺
快人一步迅為LPDDR5版本瑞芯微RK3588核心板升級了
機器人主控器的主控芯片在功能上與什么相似
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
瑞芯微系列-RK3568核心板-LGA創新設計-米爾國產開發板
米爾創新設計RK3568全LGA國產核心板,更緊湊可靠省連接器成本
基于飛凌嵌入式RK3568J核心板的工業機器人控制器應用方案
藍芯科技正式發布全球首款「純」3D視覺移動機器人VMR產品
工業應用新典范,飛凌嵌入式FET-D9360-C核心板發布!







 工商網監
工商網監
評論