 三軸加速度計LIS2DW12開發(3)----檢測活動和靜止狀態
三軸加速度計LIS2DW12開發(3)----檢測活動和靜止狀態
概述
檢測活動和靜止狀態主要用途是在嵌入式應用中實時監控加速度計的活動狀態,例如在可穿戴設備、智能手機或安全系統中檢測用戶的動作或設備的位置變化。通過設置不同的閾值和時長,可以精確地確定何時設備處于靜止狀態,何時發生了活動,從而觸發相應的操作或警報。
最近在弄ST和瑞薩RA的課程,需要樣片的可以加群申請:615061293 。
視頻教學
https://www.bilibili.com/video/BV1yj411j7RL/
樣品申請
https://www.wjx.top/vm/OhcKxJk.aspx#
源碼下載
https://download.csdn.net/download/qq_24312945/88593249
生成STM32CUBEMX
用STM32CUBEMX生成例程,這里使用MCU為STM32WB55RG。
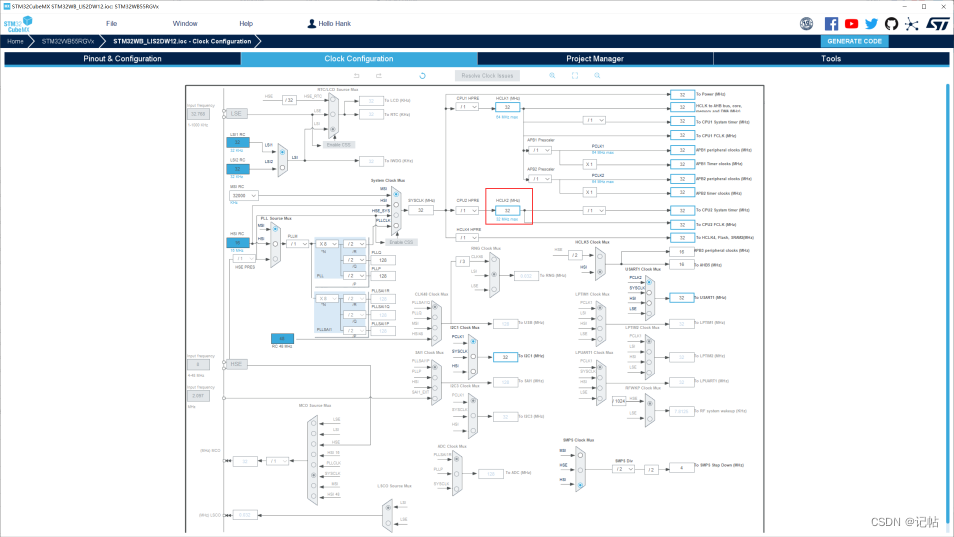
配置時鐘樹,配置時鐘為32M。
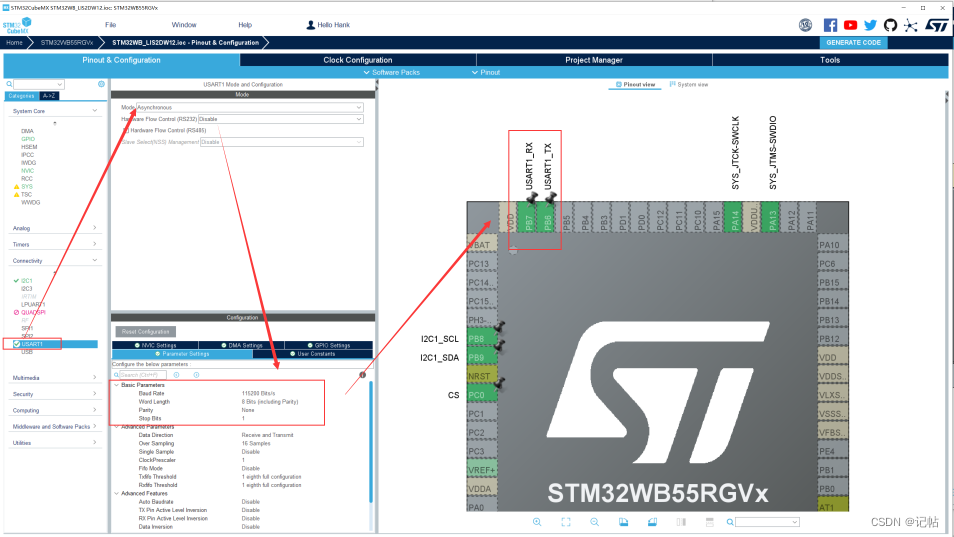
串口配置
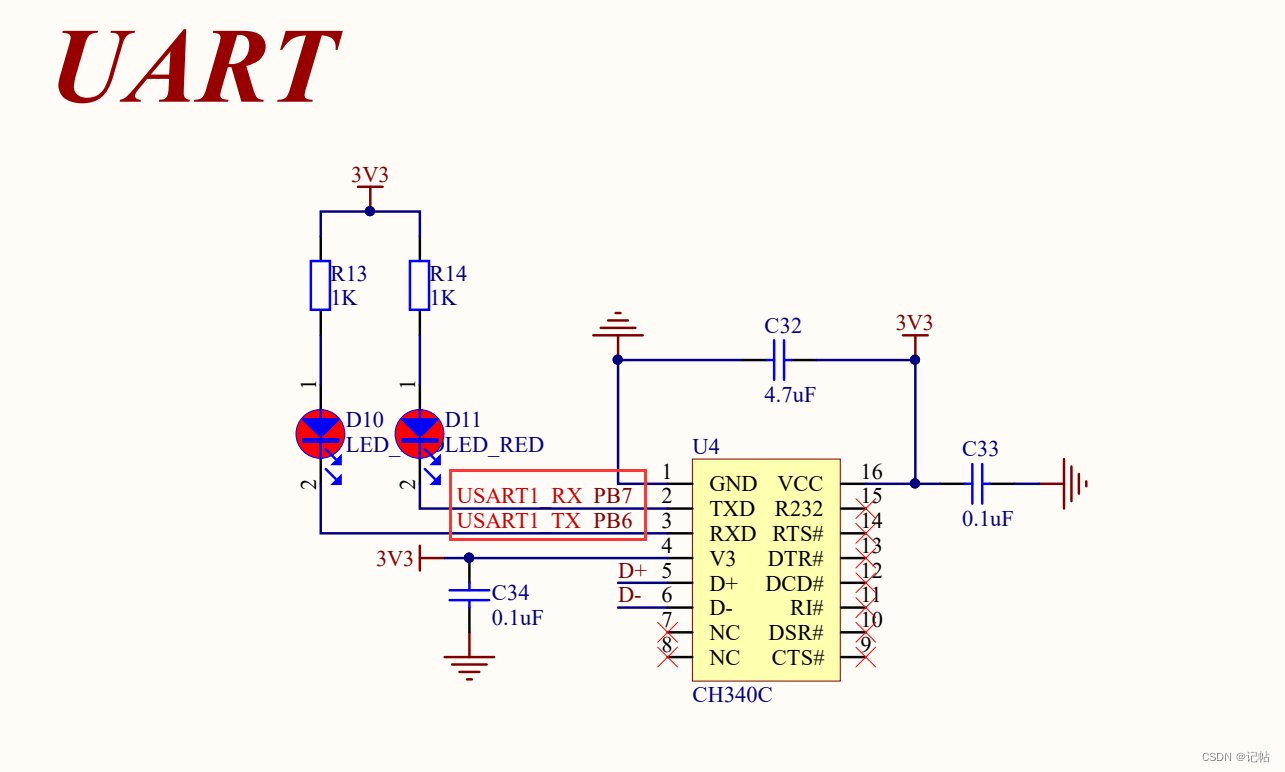
查看原理圖,PB6和PB7設置為開發板的串口。
配置串口。
IIC配置
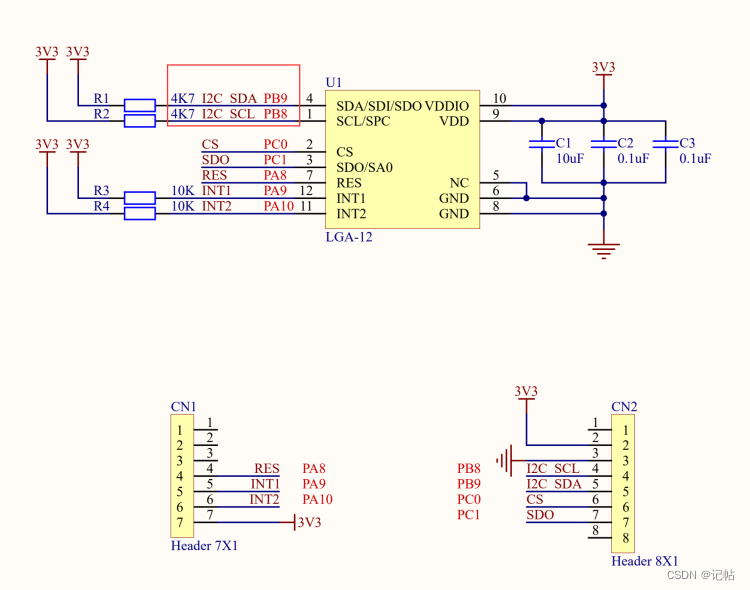
配置IIC為快速模式,速度為400k。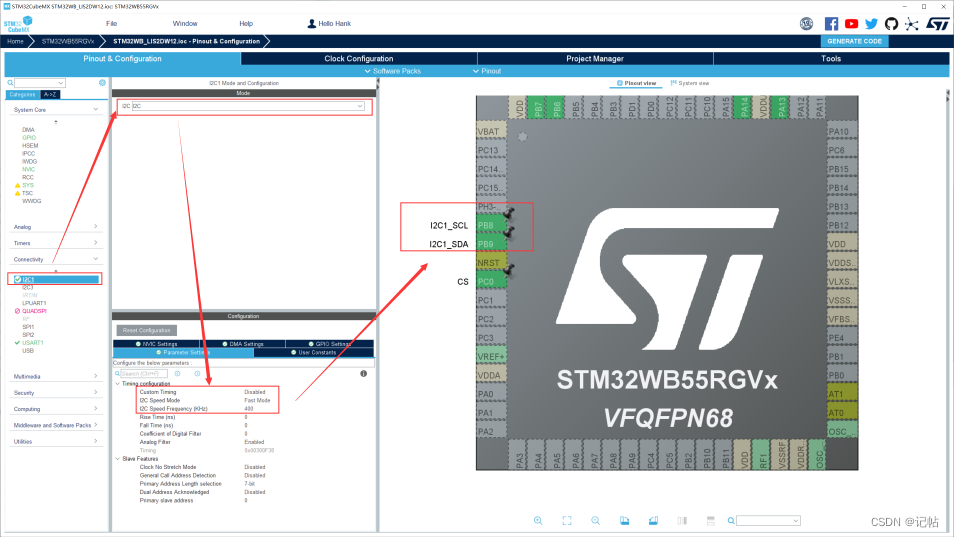
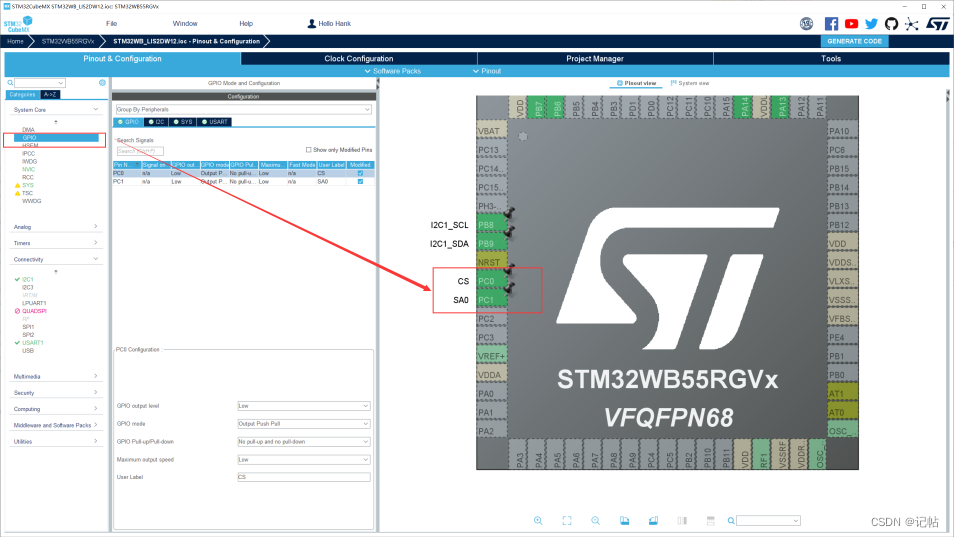
CS和SA0設置
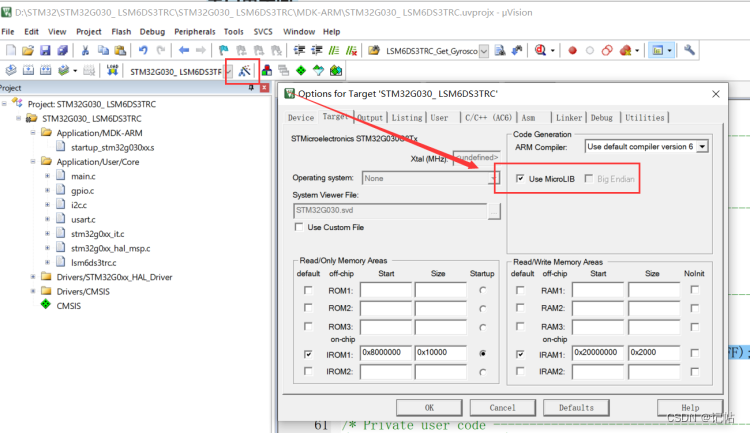
串口重定向
打開魔術棒,勾選MicroLIB
在main.c中,添加頭文件,若不添加會出現 identifier "FILE" is undefined報錯。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
函數聲明和串口重定向:
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END PFP */
參考程序
[https://github.com/STMicroelectronics/lis2dw12-pid]
初始換管腳
由于需要向LIS2DW12_I2C_ADD_H寫入以及為IIC模式。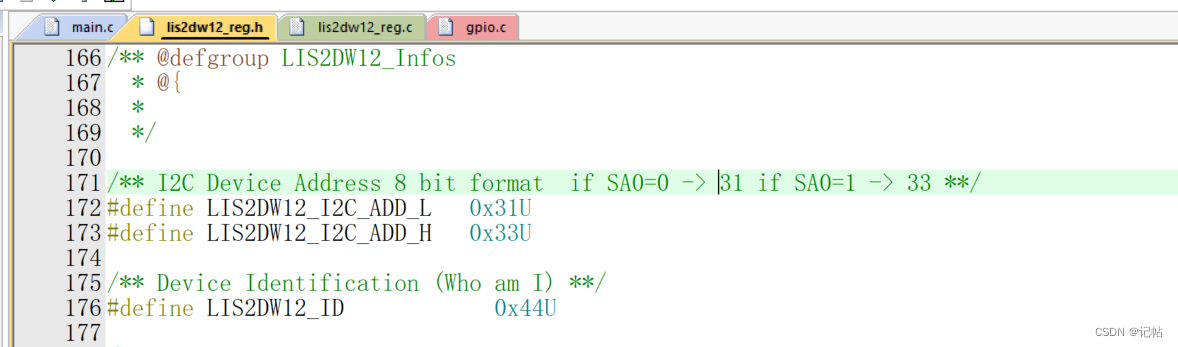
所以使能CS為高電平,配置為IIC模式。
配置SA0為高電平。
stmdev_ctx_t dev_ctx;
lis2dw12_reg_t int_route;
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.handle = &SENSOR_BUS;
HAL_GPIO_WritePin(GPIOC, CS_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC, SA0_Pin, GPIO_PIN_SET);
獲取ID
我們可以向WHO_AM_I (0Fh)獲取固定值,判斷是否為0x44。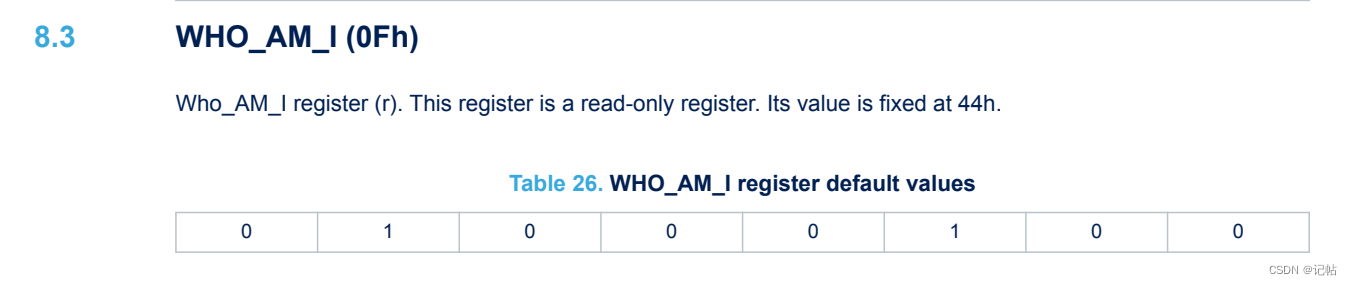
lis2dw12_device_id_get為獲取函數。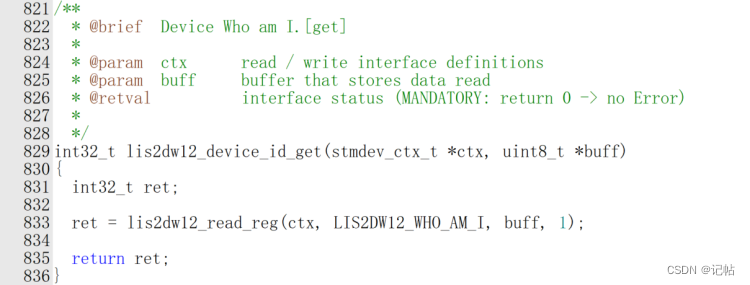
對應的獲取ID驅動程序,如下所示。
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
lis2dw12_device_id_get(&dev_ctx, &whoamI);
printf("LIS2DW12_ID=0x%x,whoamI=0x%x",LIS2DW12_ID,whoamI);
if (whoamI != LIS2DW12_ID)
while (1) {
/* manage here device not found */
}
復位操作
可以向CTRL2 (21h)的SOFT_RESET寄存器寫入1進行復位。
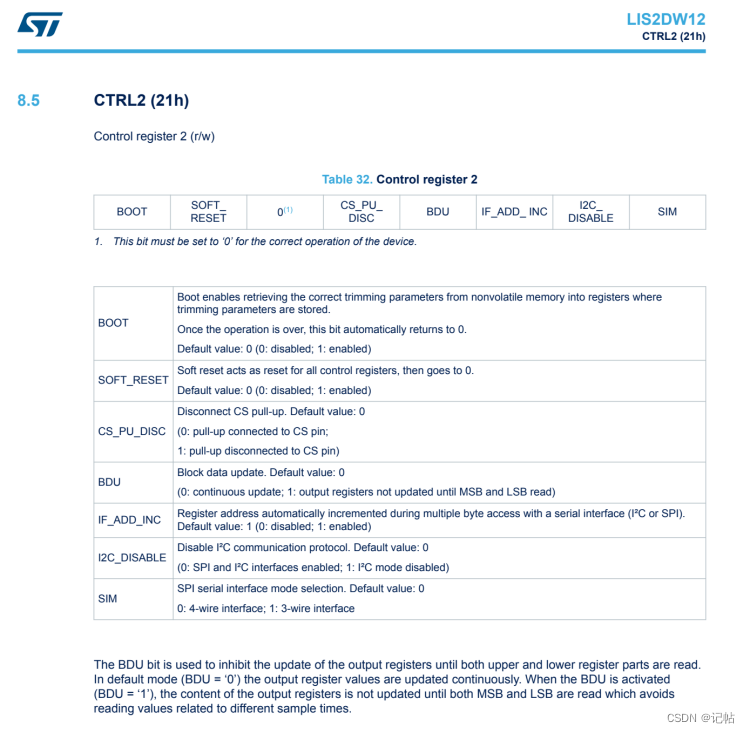
lis2dw12_reset_set為重置函數。
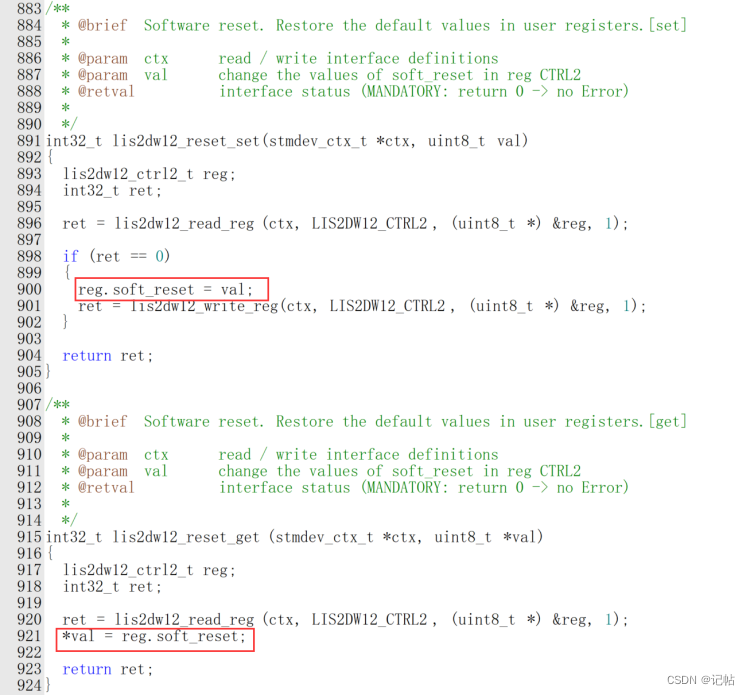
對應的驅動程序,如下所示。
/* Restore default configuration */
lis2dw12_reset_set(&dev_ctx, PROPERTY_ENABLE);
do {
lis2dw12_reset_get(&dev_ctx, &rst);
} while (rst);
設置傳感器的量程
FS[1:0] - 全量程選擇:這兩個位用于設置傳感器的量程。量程決定了傳感器可以測量的最大加速度值。例如,量程可以設置為±2g、±4g、±8g或±16g。這允許用戶根據應用的特定需求調整傳感器的靈敏度。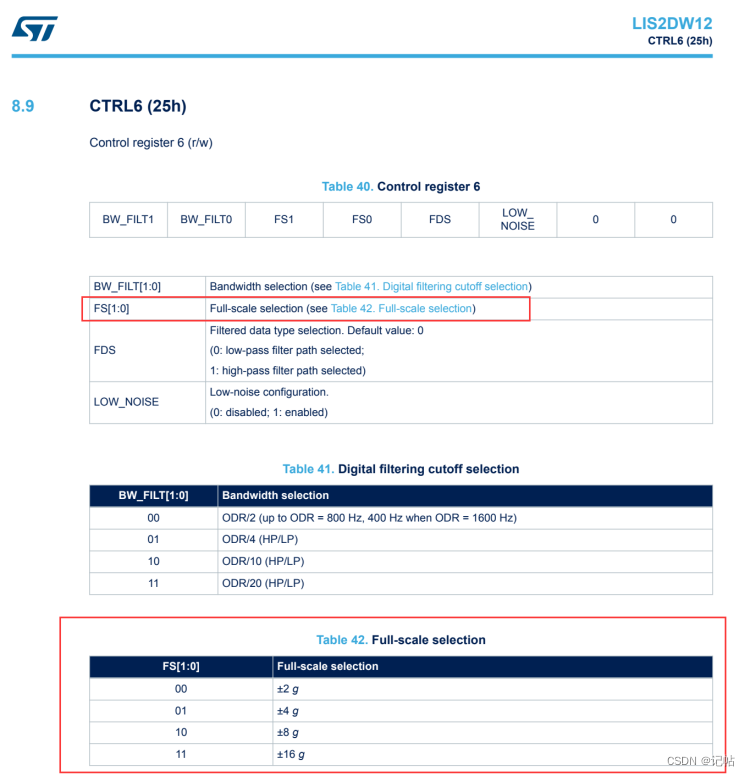
對應的驅動程序,如下所示。
/* Set full scale */
lis2dw12_full_scale_set(&dev_ctx, LIS2DW12_2g);
配置過濾器鏈
lis2dw12_filter_path_set(&dev_ctx, LIS2DW12_LPF_ON_OUT);:設置加速度計輸出的過濾器路徑。這里選擇了輸出上的低通濾波器(LPF),用于去除高頻噪聲。
lis2dw12_filter_bandwidth_set:設置加速度計的濾波帶寬,LIS2DW12_ODR_DIV_4 表示濾波器的截止頻率為輸出數據率(ODR)的四分之一。
配置電源模式
lis2dw12_power_mode_set(&dev_ctx, LIS2DW12_CONT_LOW_PWR_12bit);配置電源模式。這里設置為連續低功耗模式,且以 12 位分辨率運行。
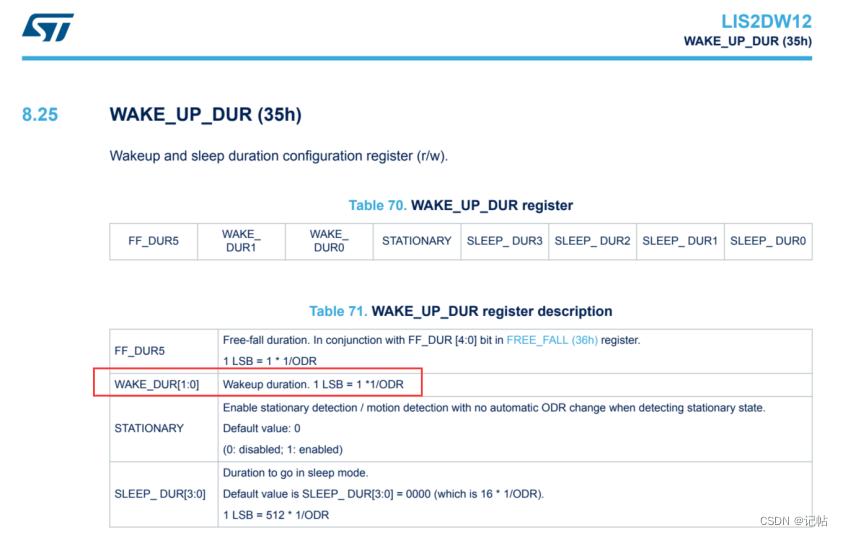
設置加速度計的喚醒持續時間
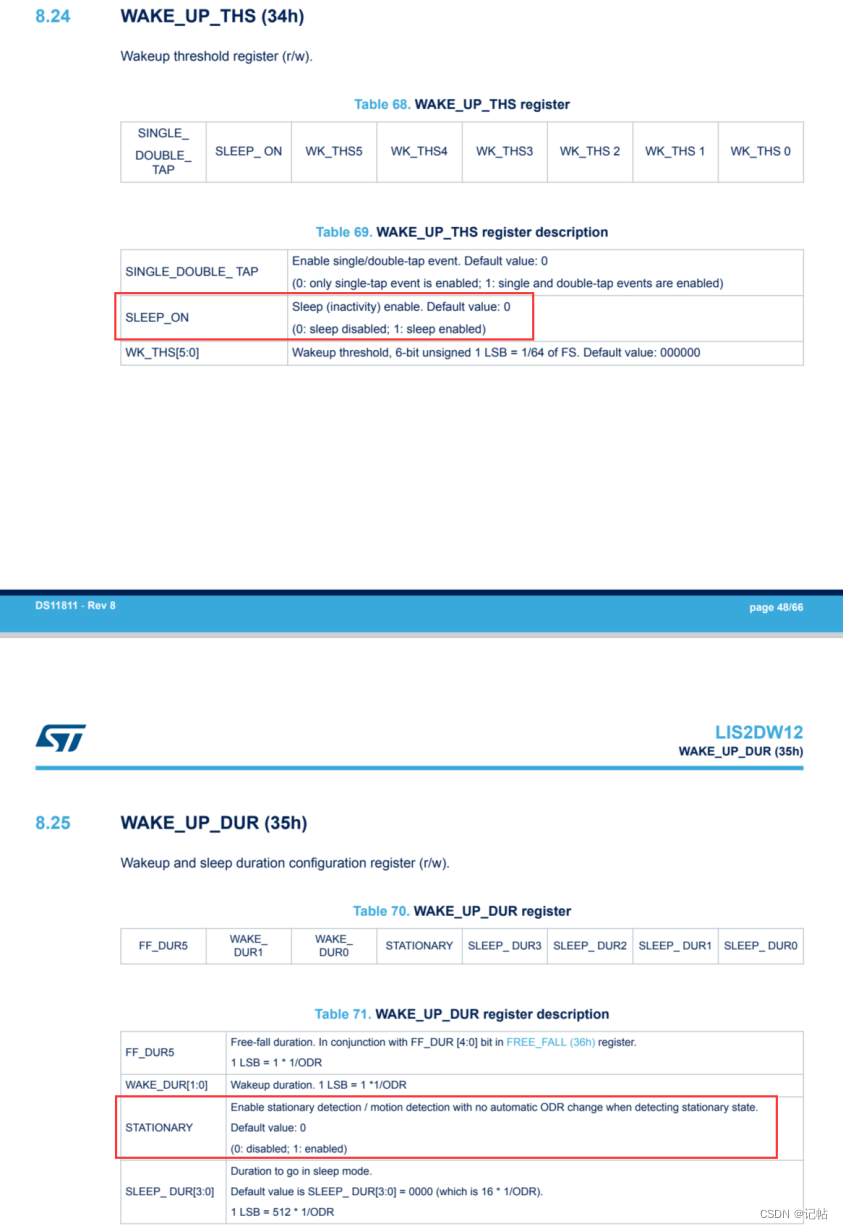
lis2dw12_wkup_dur_set:設置加速度計的喚醒持續時間,此處設置為“2”,具體的時間取決于輸出數據率(ODR)的倒數。
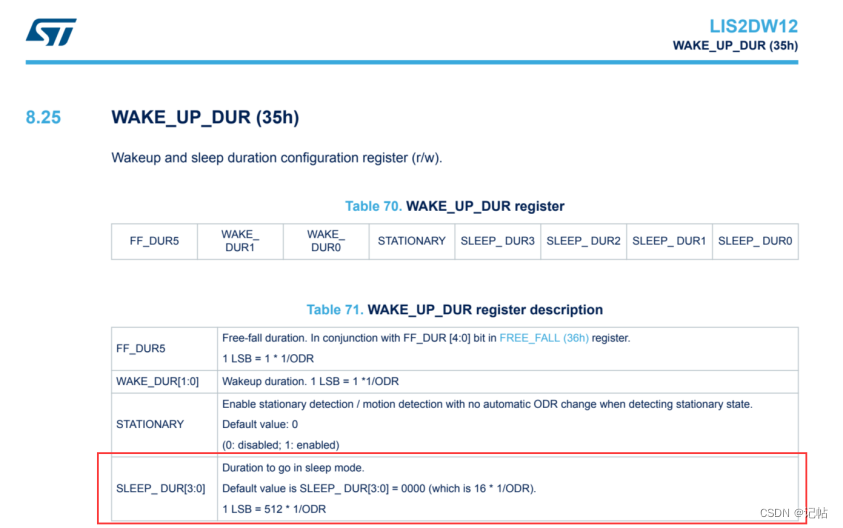
設置進入睡眠模式前的持續時間
lis2dw12_act_sleep_dur_set:設置進入睡眠模式前的持續時間,單位為輸出數據率(ODR)的512分之一秒。
設置喚醒加速度計所需的活動閾值
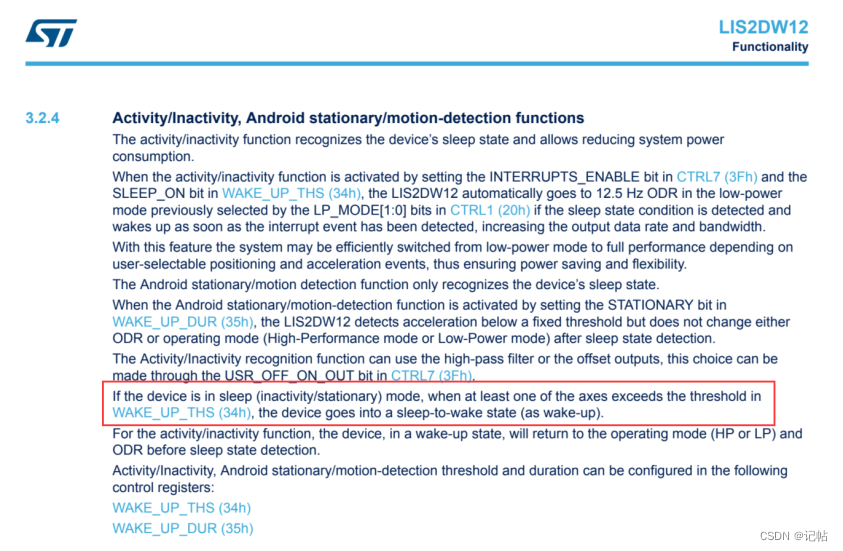
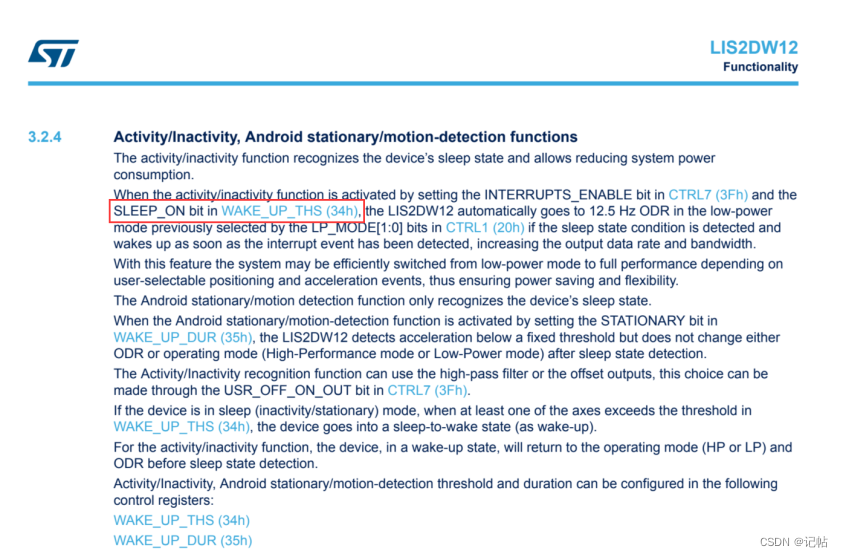
如果設備由于靜止或處于靜止狀態而進入睡眠模式,并且隨后它檢測到超過WAKE_UP_THS (34h)中設置的閾值的運動,它將從靜止狀態過渡到喚醒狀態。這意味著它將重新開始更積極地監測運動。
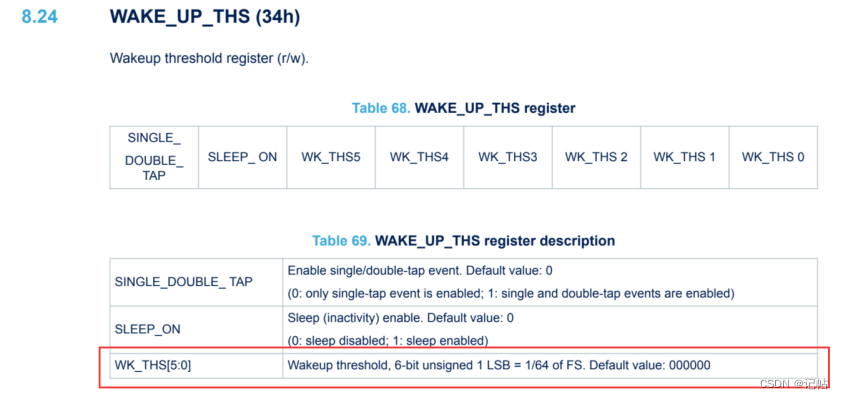
lis2dw12_wkup_threshold_set:設置喚醒加速度計所需的活動閾值,這里設置為“2”,每個 LSB(最低有效位)等于全量程的1/64。
配置喚醒中斷函數
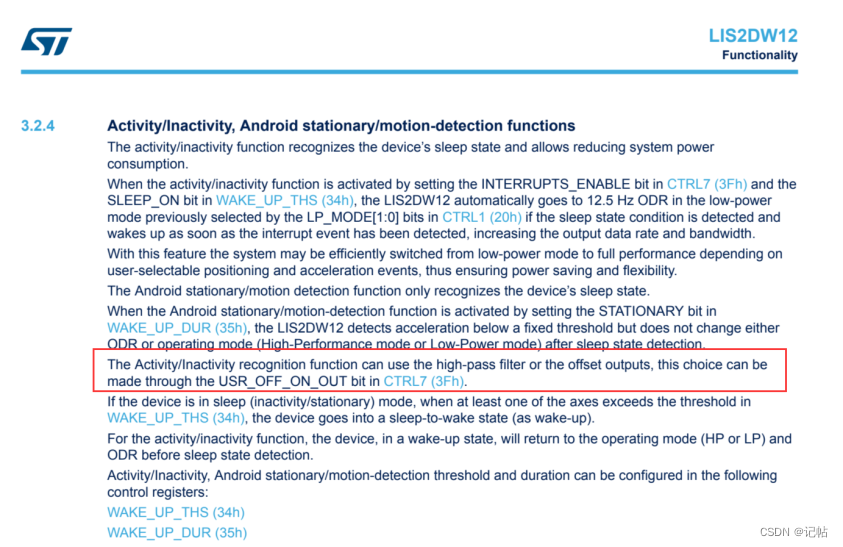
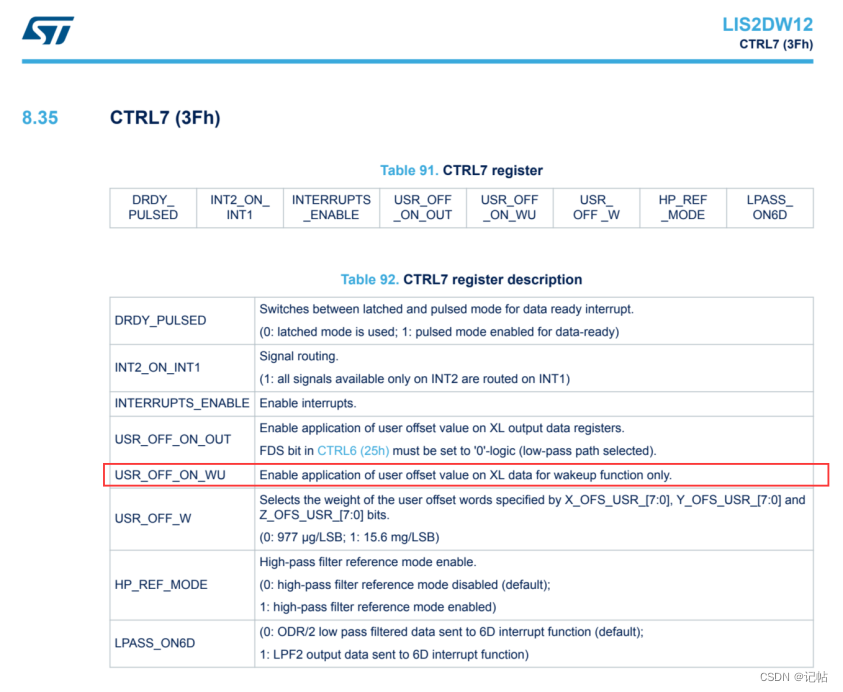
lis2dw12_wkup_feed_data_set:配置喚醒中斷函數所使用的數據類型。活動/靜止功能可以使用高通濾波或偏移輸出來確定設備的狀態。這可以通過CTRL7 (3Fh)中的USR_OFF_ON_OUT位來配置。
/* Data sent to wake-up interrupt function */
lis2dw12_wkup_feed_data_set(&dev_ctx, LIS2DW12_HP_FEED);
加速度計檢測活動或靜止的模式
lis2dw12_act_mode_set:設置加速度計檢測活動或靜止的模式,LIS2DW12_DETECT_ACT_INACT 用于配置設備以檢測活動或靜止狀態。
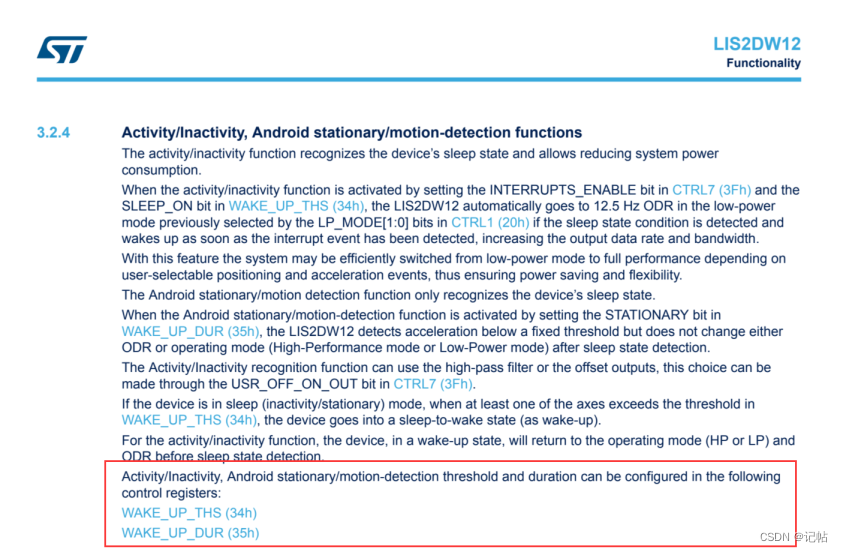
這些檢測功能的閾值和持續時間可以通過兩個控制寄存器進行配置:
WAKE_UP_THS (34h) 用于設置喚醒的閾值水平。
WAKE_UP_DUR (35h) 用于設置喚醒和靜止狀態的持續時間。
在WAKE_UP_THS (34h)中設置SLEEP_ON位以啟用靜止狀態檢測。
/* Config activity / inactivity or stationary / motion detection */
lis2dw12_act_mode_set(&dev_ctx, LIS2DW12_DETECT_ACT_INACT);
啟用喚醒中斷
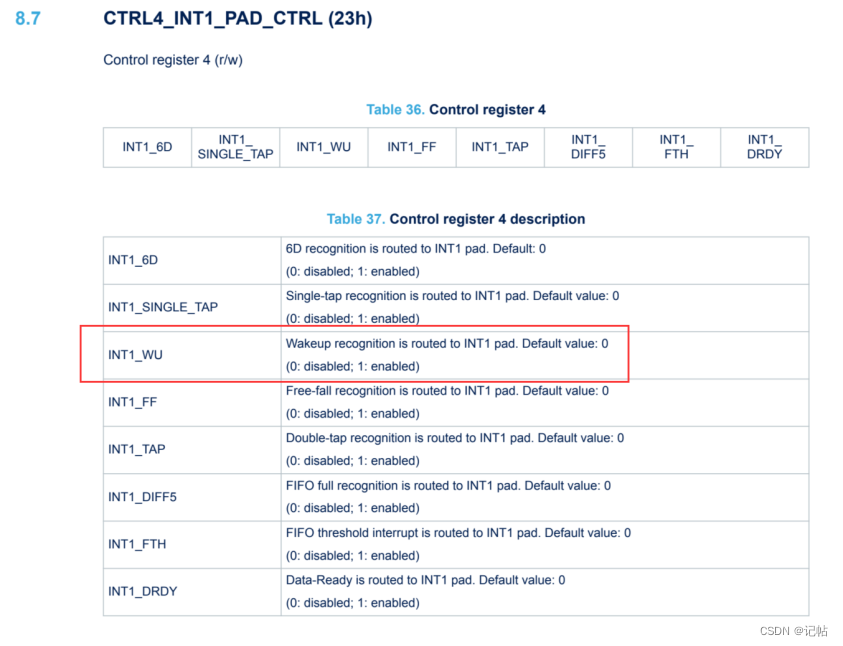
lis2dw12_pin_int1_route_get 和 lis2dw12_pin_int1_route_set:這兩個函數配合使用來獲取和設置中斷路由配置。首先獲取當前的中斷路由配置,然后啟用喚醒中斷(int1_wu),最后將配置寫回加速度計。
/* Enable activity detection interrupt */
lis2dw12_pin_int1_route_get(&dev_ctx, &int_route.ctrl4_int1_pad_ctrl);
int_route.ctrl4_int1_pad_ctrl.int1_wu = PROPERTY_ENABLE;
lis2dw12_pin_int1_route_set(&dev_ctx, &int_route.ctrl4_int1_pad_ctrl);
設置輸出數據速率
設置加速度計的數據輸出速率,LIS2DW12_XL_ODR_200Hz 表示每秒輸出200個數據點。
/* Set Output Data Rate */
lis2dw12_data_rate_set(&dev_ctx, LIS2DW12_XL_ODR_200Hz);
檢測活動狀態
可以不斷地檢查 LIS2DW12 加速度計的狀態,以確定是否檢測到活動或靜止(無活動)事件。
sleep_state_ia 位,如果該位被設置(通常表示檢測到靜止狀態)。
wu_ia 位,如果該位被設置(通常表示檢測到活動狀態)。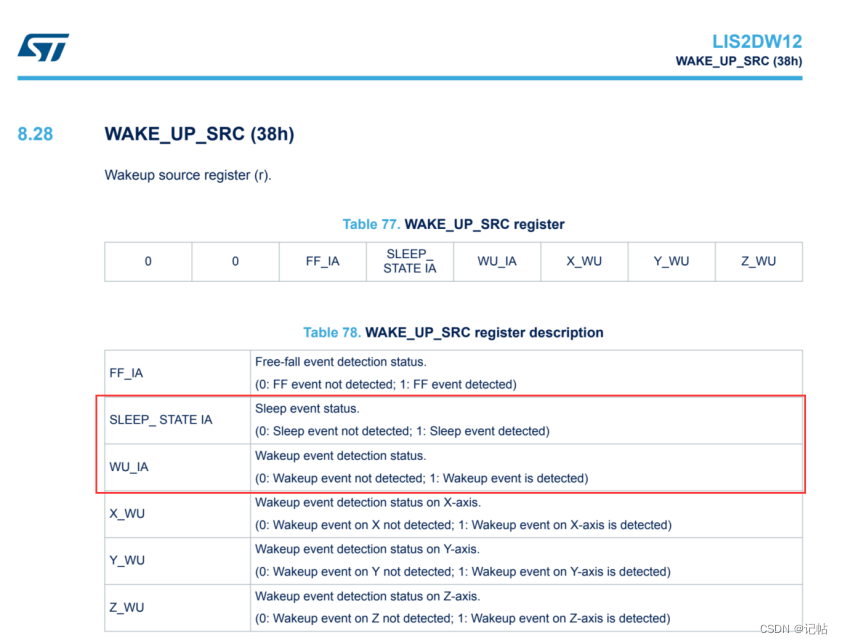
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
lis2dw12_all_sources_t all_source;
/* Read status register */
lis2dw12_all_sources_get(&dev_ctx, &all_source);
/* Check if Activity/Inactivity events */
if (all_source.wake_up_src.sleep_state_ia)
{
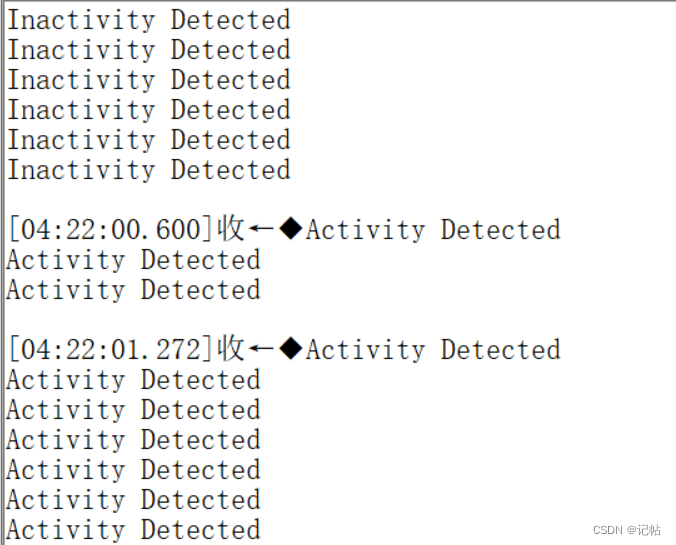
printf("Inactivity Detectedrn");
}
if (all_source.wake_up_src.wu_ia) {
printf("Activity Detectedrn");
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
演示
審核編輯:湯梓紅
-
mems
+關注
關注
128文章
3854瀏覽量
189695 -
加速度計
+關注
關注
6文章
690瀏覽量
45670 -
三軸加速度計
+關注
關注
1文章
27瀏覽量
13307 -
stm32cubemx
+關注
關注
5文章
278瀏覽量
14581
發布評論請先 登錄
相關推薦
e2studio開發三軸加速度計LIS2DW12(3)----檢測活動和靜止狀態
e2studio開發三軸加速度計LIS2DW12(4)----測量傾斜度
三軸加速度計LIS2DUX12開發(3)----計步器
e2studio開發三軸加速度計LIS2DW12(1)----輪詢獲取加速度數據

是否可以使用LIS2DW12加速度計進行傾斜角度檢測呢?
LIS2DW12相關資料分享
LIS2DW12的應用筆記
三軸加速度計、陀螺儀和磁力計的應用原理

e2studio開發三軸加速度計LIS2DW12(1)----輪詢獲取加速度數據
三軸加速度計LIS2DW12開發(4)----測量傾斜度

e2studio開發三軸加速度計LIS2DW12(3)----檢測活動和靜止狀態
e2studio開發三軸加速度計LIS2DW12(4)----測量傾斜度





 工商網監
工商網監
評論