 純電動環衛車設計實例
純電動環衛車設計實例
純電動環衛車作為新能源汽車中的重要部分,大力推進該領域不同類型車型的大力發展,已成為當下新能源汽車領域發展的重要方向。為此,重點對純電動環衛車的市場概況、結構類型及結構組成、近期公告車型及未來重點開發車型等方向進行了分析,掌握了當前環衛車領域的總體現狀,這對后期企業有針對性地開發純電動環衛車、保障所開發純電動環衛車具有高性價比具有重點指導作用。
1 環衛車動力經濟性設計指標及分析
1.1 純電動環衛車的動力經濟性能指標
本次設計的純電動環衛車動力經濟性能指標主要是最高車速、爬坡性能和綜合電耗,其次為加速性能:最高車速Vmax,km/h;最大爬坡度imax;綜合工況電耗Q,kWh/100 km;加速時間t,s。
1.2 純電動環衛車的行駛阻力
根據整車縱向動力學特性,純電動環衛車在行駛過程中,所受阻力包括空氣阻力Fw、滾動阻力Ff、加速阻力Fj及坡道阻力Fi,其驅動力Ft與阻力關系可表示為
Ft=Ff+Fw+Fj+Fi(1)

(2)
考慮到實際上正常道路的坡道角不大,cosα≈1,sinα≈tanα,常將上式寫為

(3)
式中,Tm為驅動電機扭矩;ig為變速器傳動比;i0為主減速器傳動比;ηT為傳動系統效率;m為環衛車總質量;r為輪胎滾動半徑;f為滾動阻力系數;CD為空氣阻力系數;A為迎風面積;α為坡道角;δ為旋轉質量換算系數;u為車速;ua為環衛車與空氣相對速度(風速為0時,ua=u)[1]。
1.3 純電動環衛車的功率平衡
純電動環衛車行駛過程中,電機的有效功率和行駛阻力功率相互平衡。假定風速為0,其驅動功率Pm與阻力平衡關系可表示為

(4)
電機的額定功率應滿足整車對最高車速的要求,額定功率應不小于車輛以最高車速平路勻速行駛時的阻力功率,同時考慮電機的過載要求[2]。
即
(5)
電機的峰值功率應能滿足車輛的爬坡性能要求,即
(6)
電機的峰值功率也應滿足車輛的加速性能要求,即

(7)
式中,uf為加速后的車速,m/s;ub為驅動電機額定轉速對應的車速,m/s;ρα為空氣密度;tα為預期加速時間,s;δ為旋轉質量換算系數[3]。
1.4 純電動環衛車的最高車速
純電動環衛車的最高車速是指在水平良好的路面(混凝土或瀝青)上環衛車能達到的最高行駛車速。最高車速計算公式為
(8)
確定最高車速時,需要同時考慮功率平衡(式(5)),聯合得出最高車速。
1.5 純電動環衛車的加速時間
純電動環衛車加速時間表示其加速能力,分為原地起步加速時間和超車加速時間。本文提到的純電動環衛車由于其低速作業特性,只關注其原地起步加速時間,且加速時間不作為重點關注指標。計算公式為
(9)
式中,a為車輛直線行駛加速度,m/s2。
1.6 純電動環衛車的最大爬坡度
純電動環衛車的最大爬坡度一般指滿載良好路面I擋最大爬坡度。爬坡度用坡道角正切值的百分比表示,計算公式為

(10)
1.7 純電動環衛車的綜合工況電耗
本次設計的純電動環衛車的經濟性采用綜合工況下車輛行駛百公里的耗電量來衡量。
在進行純電動環衛車設計時,先根據整車總體性能指標,設定動力性、經濟性目標參數,再據此選定動力鏈系統參數[4]。
2 純電動環衛車設計實例
以某款純電動環衛車為例,該車組成如圖1所示。
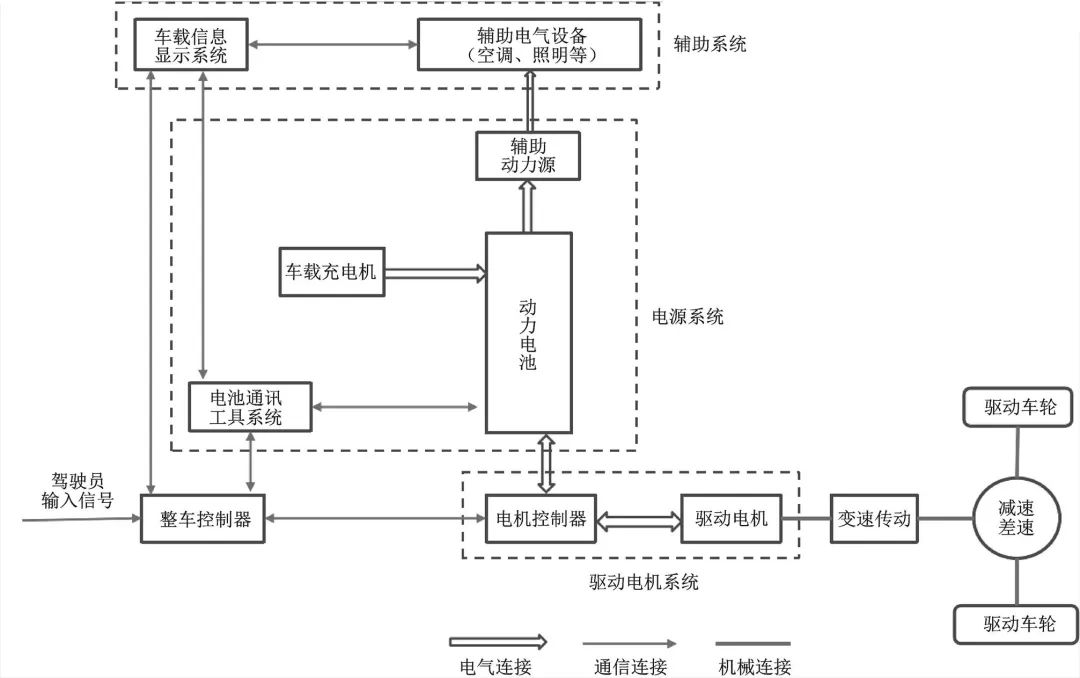
圖1 某純電動環衛車組成
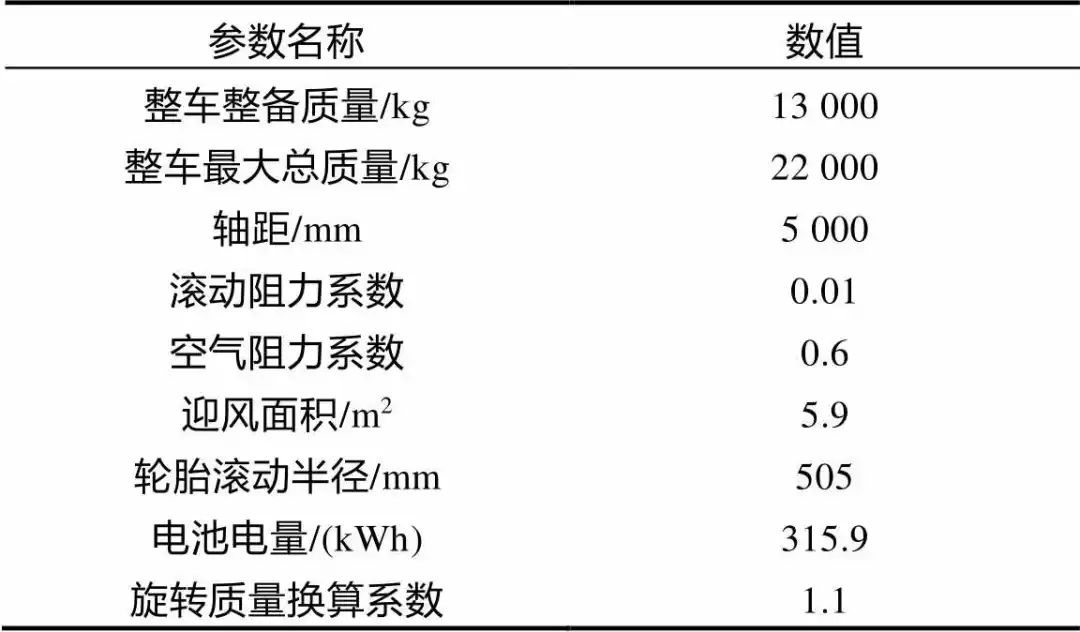
整車參數如表1所示。
表1 某純電動環衛車整車參數
整車性能要求:
1)最高車速Vmax=89 km/h;
2)最大爬坡度imax≥20%;
3)綜合工況電耗Q<100 kWh/100 km;
4)0~30 km/h加速時間t≤15 s。
2.1 純電動環衛車的動力需求
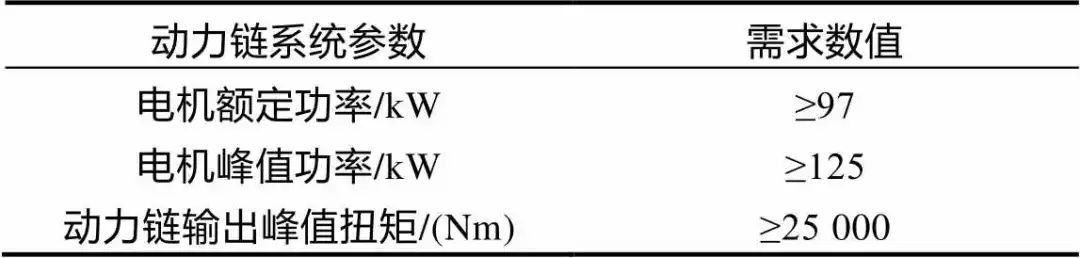
根據式(5)可得,動力需求額定功率P額=97 kW;
根據式(6)、式(7)可得,動力需求額定功率P峰=125 kW;
根據式(3)可得,動力需求峰值扭矩T峰= 25 000 Nm。
根據以上計算結果,確定動力鏈需求如表2所示。
表2 某純電動環衛車動力鏈需求
2.2 純電動環衛車的路譜采集
選取主銷區域環衛車典型作業行駛工況,利用speedbox車載記錄儀跟車采集環衛車路譜數據,作為車輛仿真輸入,開展整車動力性和經濟性分析。
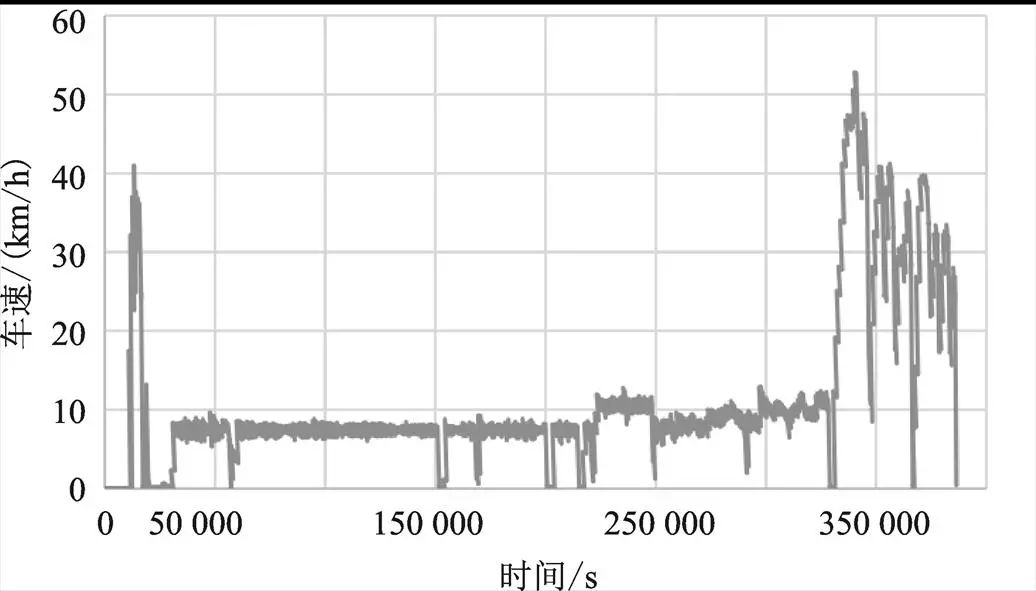
圖2 環衛車實車路譜
2.3 純電動環衛車的動力鏈技術路線
根據純電動環衛車整車動力需求,充分考慮電驅橋、中央直驅、雙電機3種技術路線,共匹配8條動力鏈方案,如圖3所示。
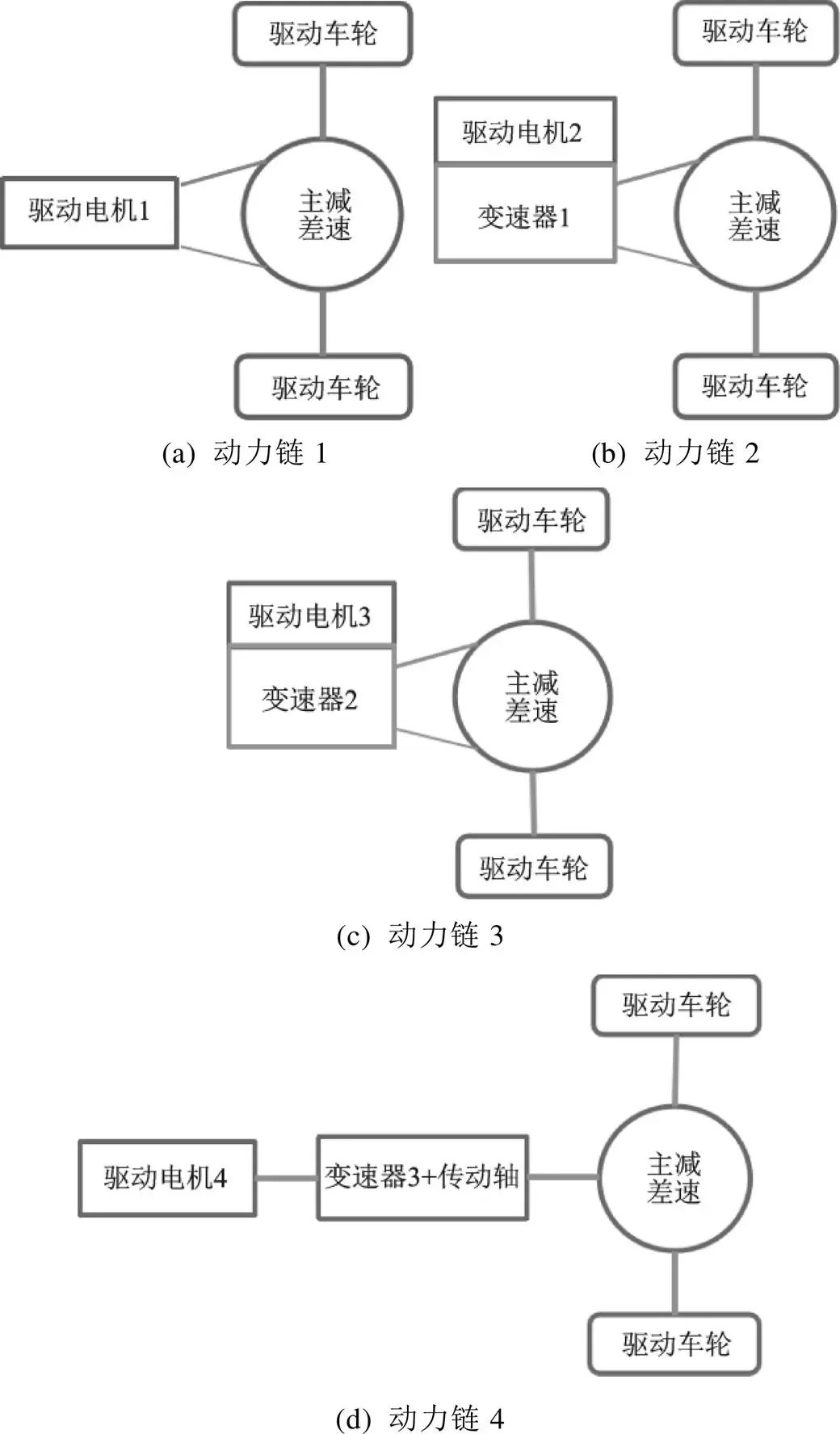
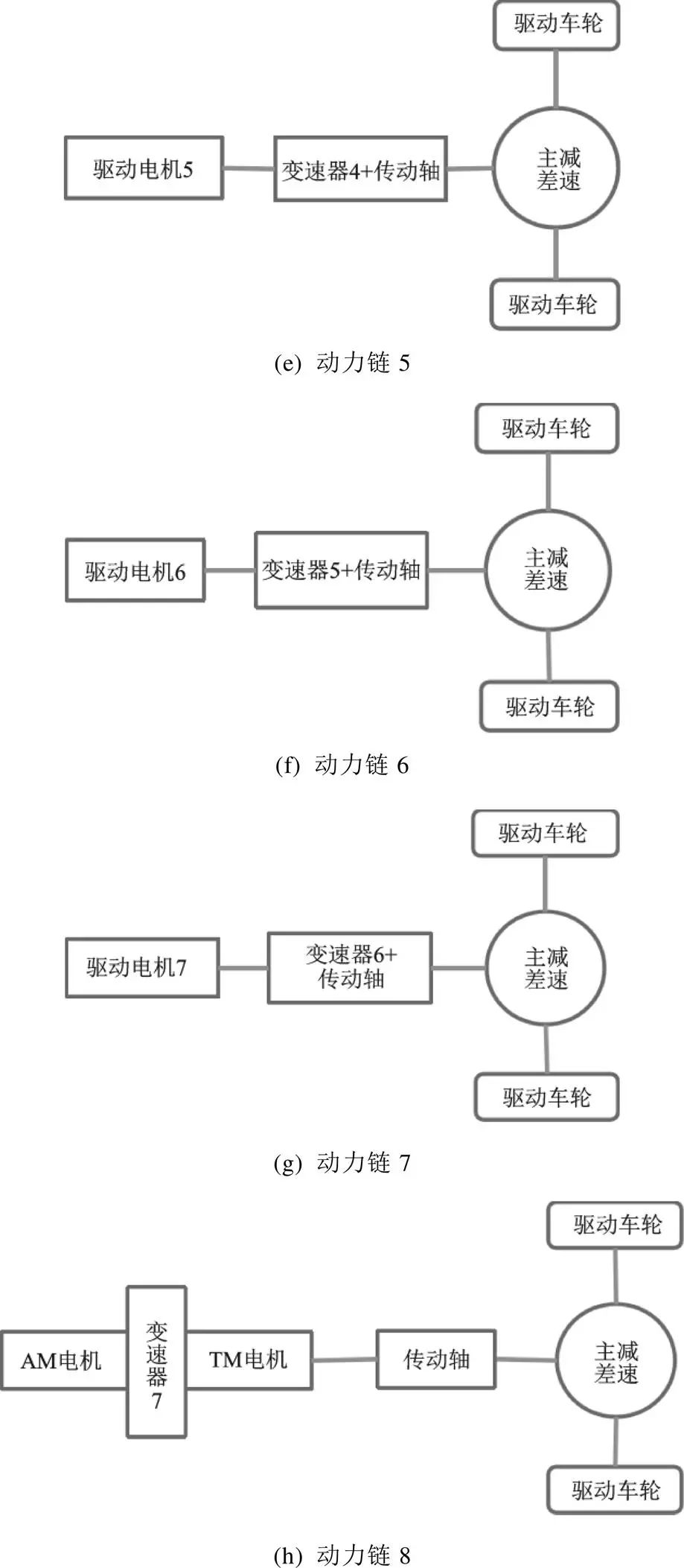
圖3 8種動力鏈方案
技術路線一:從整車降重和提升動力鏈效率出發,匹配電驅橋方案,初選3條電驅動橋動力鏈,其中,第1條為電機直接與驅動橋主減速器集成,未增加變速器,動力性較弱,且應用較少;第2、3條電驅動橋動力鏈為電機+4AMT+驅動橋集成方案,路況適應性好,動力較強。
技術路線二:從動力鏈總體成熟度與可靠性出發,初選4條中央直驅動力鏈方案,其中,第4、5、6條為電機+6AMT+傳動軸+驅動橋組合,僅對電機+6AMT進行優化匹配,動力強勁,可靠性高;第7條為電機+4AMT+傳動軸+驅動橋組合,爬坡稍遜于6擋,但有成熟應用案例。
技術路線三:從競品對標角度出發,針對某競品雙電機技術方案,選型某成熟雙電機動力鏈,由于電控非自主提供,成本較高,且爬坡性能稍遜于直驅。
2.4 純電動環衛車的多動力鏈配置計算
根據該純電動環衛車整車和各總成部件參數,基于Cruise工具軟件,建立如圖4所示的整車仿真模型,輸入整車及電機、動力電池等各功能模塊參數,并添加機械、電氣、總線信息連接。
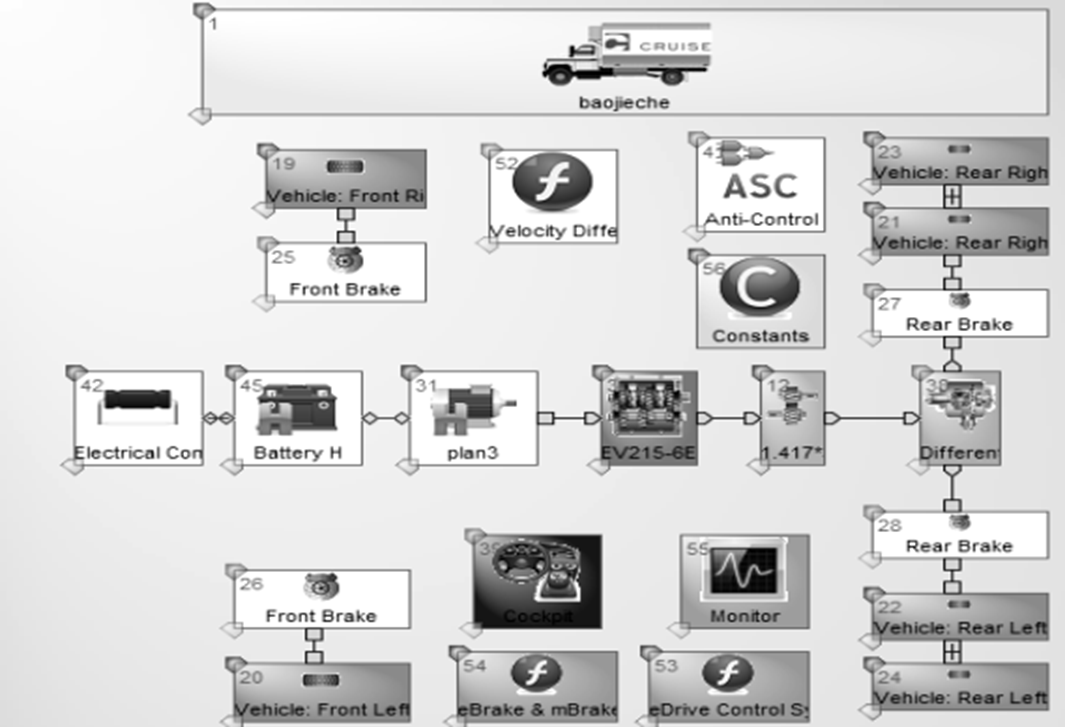
圖4 某純電動環衛車Cruise仿真模型
模塊之間的機械連接完成后建立總線信息連接,如圖5所示。
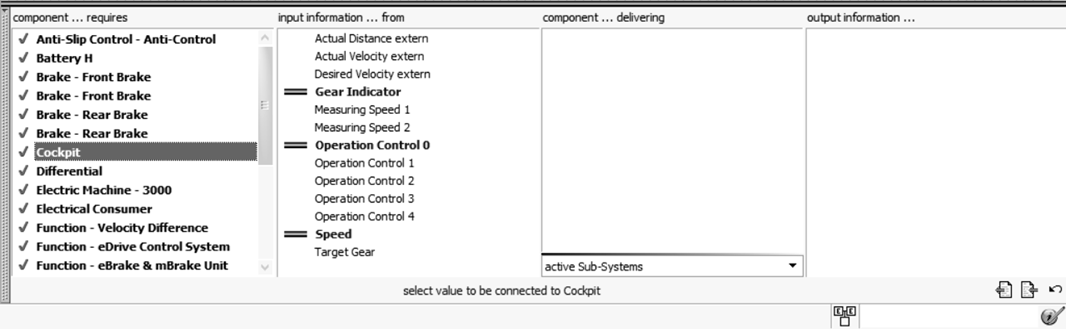
圖5 某純電動環衛車模型信號連接
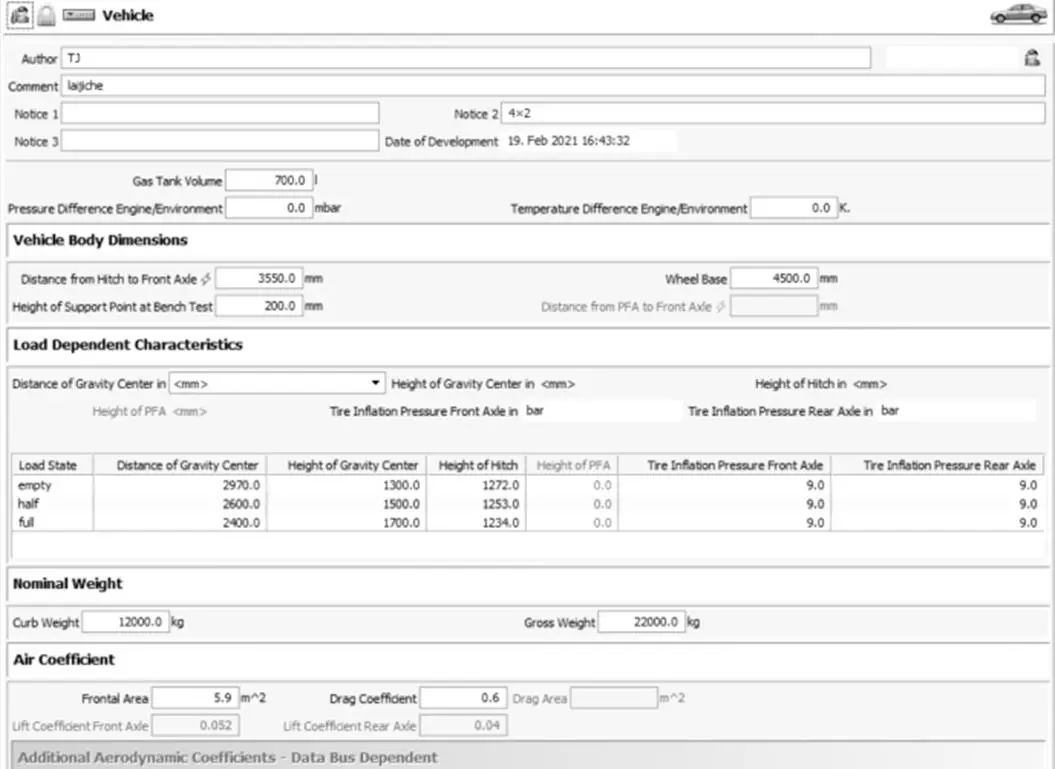
圖6 某純電動環衛車模型參數輸入
模塊之間的機械連接和總線信息連接完成后,需要設置模型中各模塊參數,這些參數其實在前期整車方案設計過程中已經完成了梳理,可直接填入。如圖6所示為整車參數的設置。
表3 電驅動橋技術路線動力鏈仿真參數
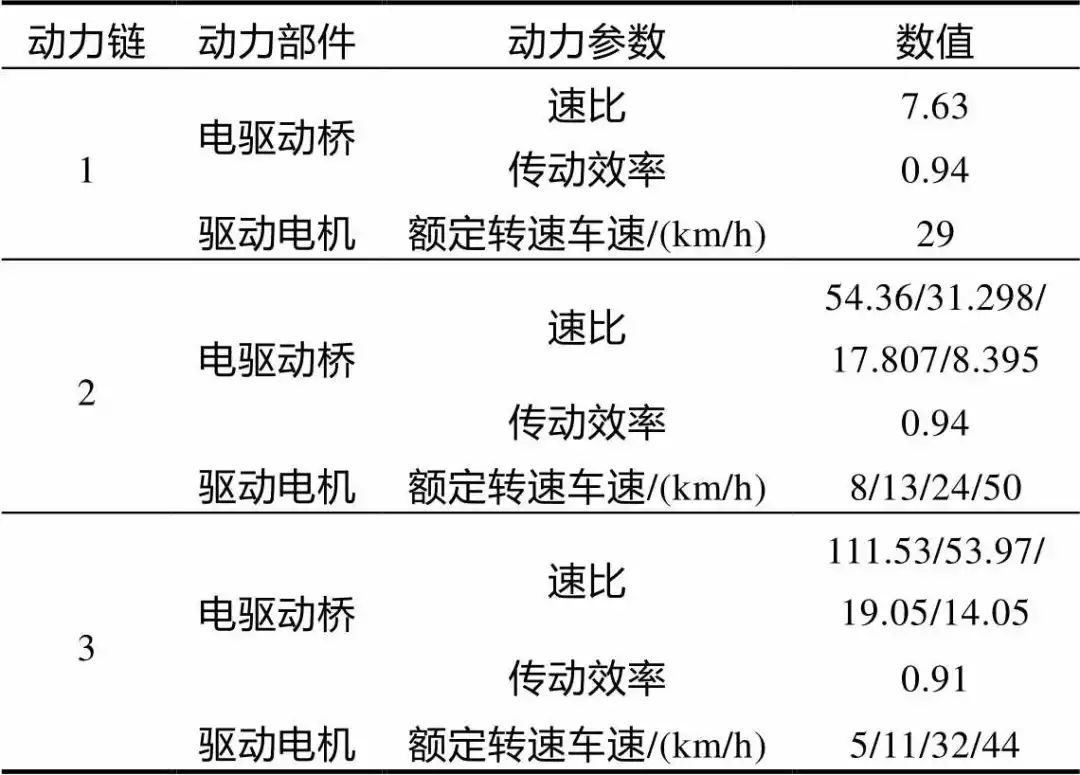
表4 中央直驅技術路線動力鏈參數
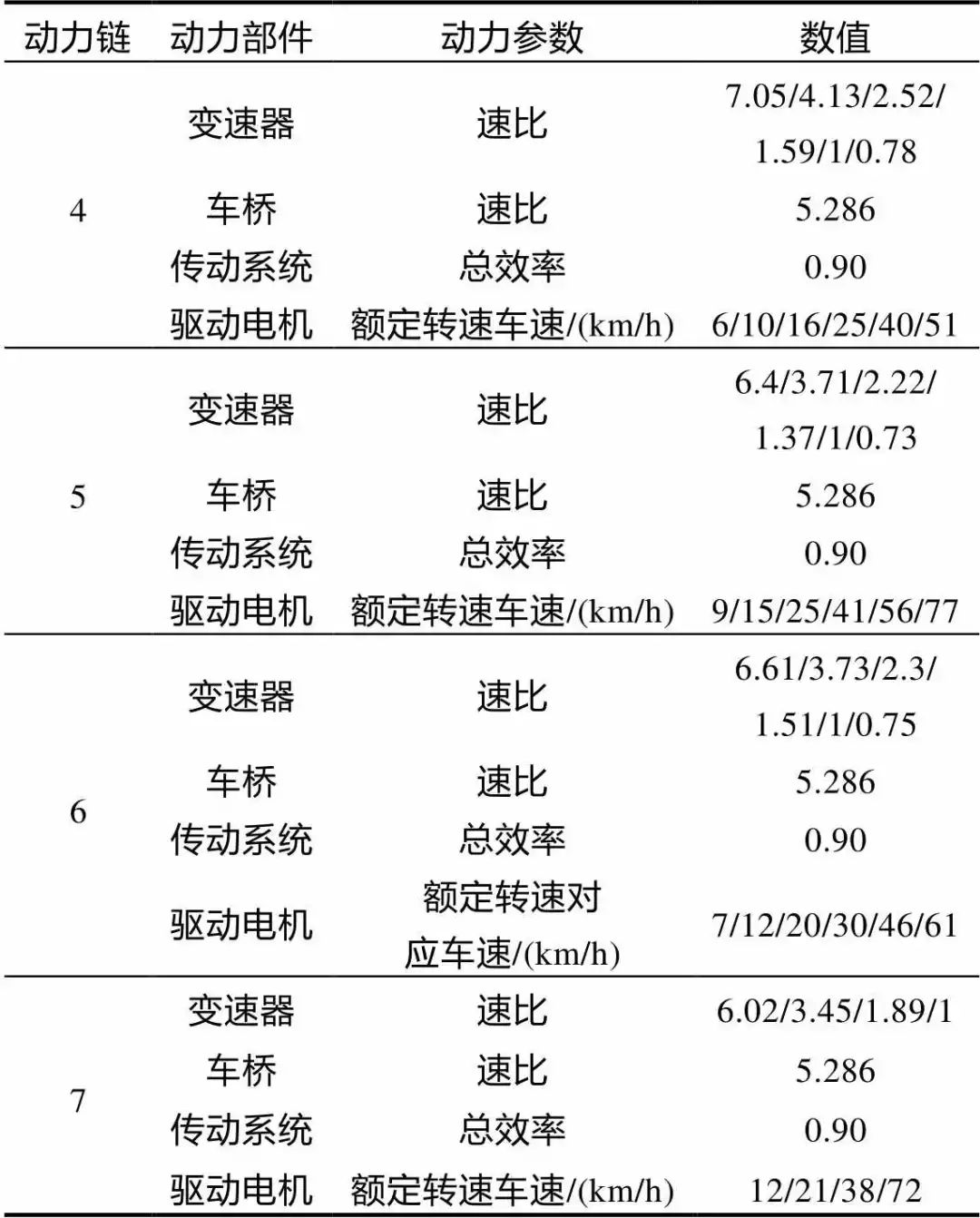
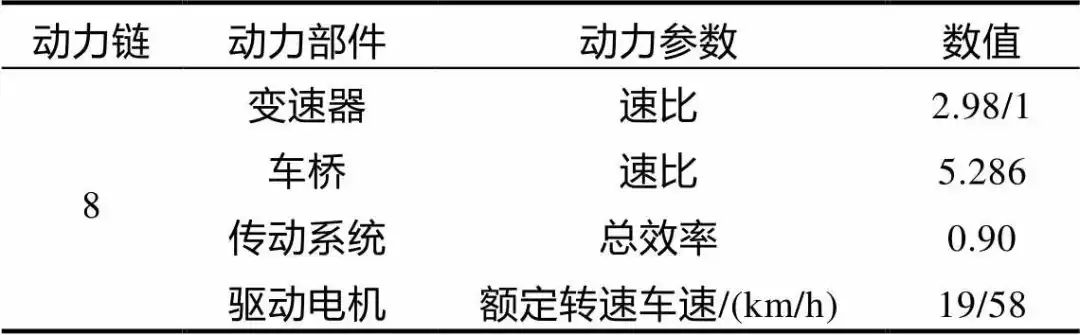
基于圖3多動力鏈配置方案,3種技術路線對應的仿真計算所用動力鏈參數如表3-表5所示。
表5 雙電機技術路線動力鏈參數
基于以上參數輸入,分別設置最高車速、爬坡性能計算任務;然后,結合環衛車實采路譜,定義循環作業工況,設定百公里電耗計算任務。經過計算,可得該純電動環衛車不同動力鏈動力性能及百公里綜合電耗。
匯總上述計算結果,同時整理8條動力鏈重量、成本數據,如表6所示。
表6 某純電動環衛車多動力鏈性能
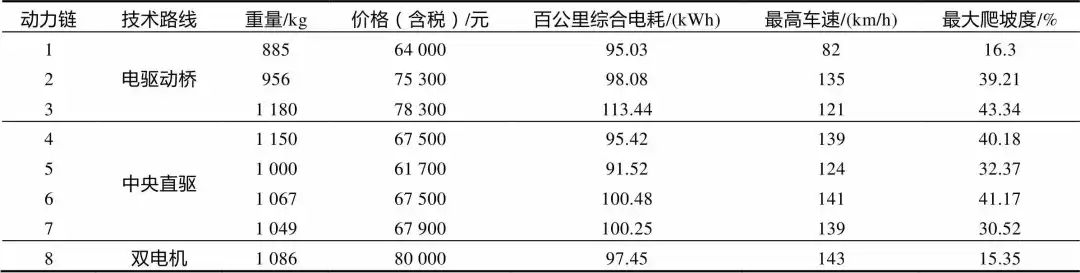
注:表中價格僅用于方案對比。
從表中數據可以看出,動力鏈1動力參數不滿足整車要求(其中最高車速要求89 km/h,爬坡≥20%),故不采用;
動力鏈2和3電驅動橋方案,由于其系統匹配尚不成熟,成本太高且電耗及重量不具備競爭優勢,在本次產品設計中暫不采用;
動力鏈4、5、6、7中央電驅動力鏈方案為本次優化的重點,在設計過程中,對電機和變速器均進行了優化選型,提高電機高效區同時控制成本同時采用多擋方案。動力鏈5就是在控制成本、質量基礎上,選擇了map優于其余3條動力鏈的高效電機,電機高效區范圍增加的同時,成本和重量控制最低,為本次動力鏈設計最優化方案。電機系統map如圖7所示。
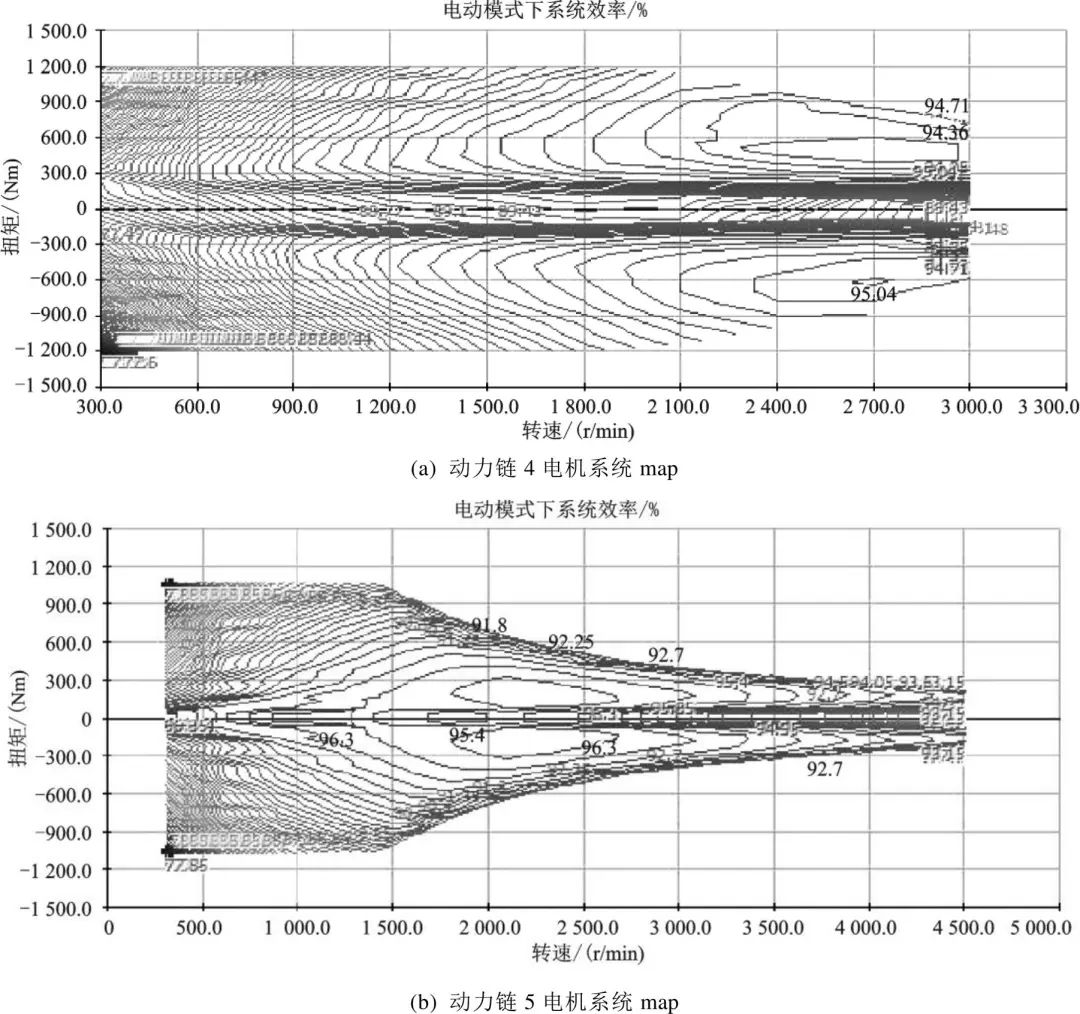
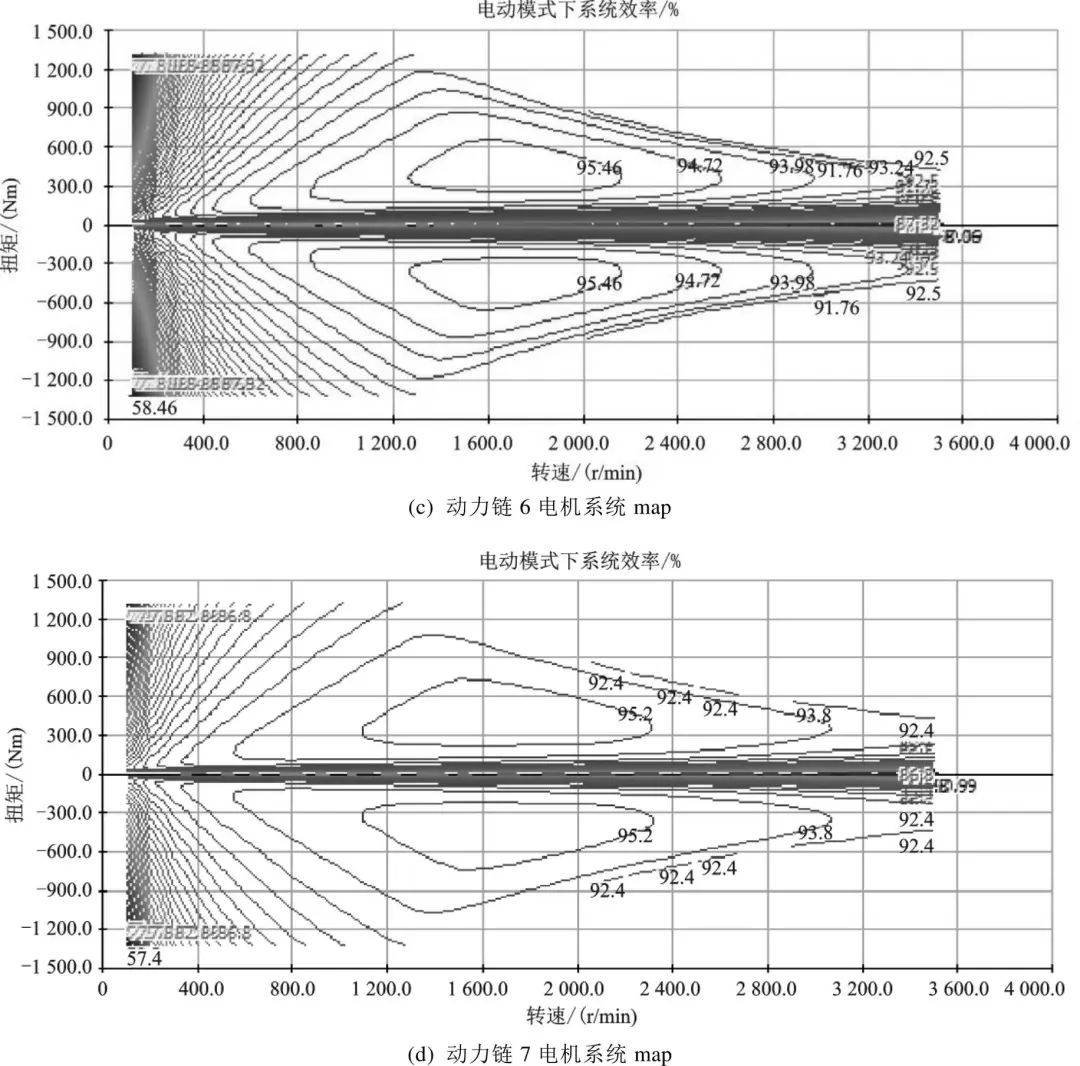
圖7 某純電動環衛車部分動力鏈電機系統map
動力鏈8為某競品車型方案,考慮競品為自主開發系統,忽略動力鏈成本和重量數據,僅從表6中動力經濟性可以看出,競品方案并不具備絕對優勢。
綜上,經過動力鏈匹配優化,確定動力鏈5為本次純電動環衛車整車動力鏈。
3 結論
本文根據某純電動環衛車動力經濟性能指標,通過理論計算,初步選型動力鏈系統參數,然后結合實車路譜采集,建立該純電動環衛車仿真模型,完成多動力鏈配置動力經濟性驗證,最后,從動力經濟性、成本、質量等方面綜合分析,確定最佳動力鏈配置組合。
審核編輯:湯梓紅
-
新能源汽車
+關注
關注
141文章
10199瀏覽量
98748 -
電機
+關注
關注
141文章
8761瀏覽量
143731 -
額定功率
+關注
關注
0文章
75瀏覽量
16560
原文標題:純電動環衛車動力鏈匹配分析
文章出處:【微信號:EDC電驅未來,微信公眾號:EDC電驅未來】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論