") 三軸陀螺儀模塊怎么使用
三軸陀螺儀模塊怎么使用
三軸陀螺儀模塊是一種用于測(cè)量角速度和方向的傳感器,可以在航空航天、汽車、無(wú)人機(jī)等領(lǐng)域廣泛應(yīng)用。本文將詳細(xì)介紹三軸陀螺儀模塊的原理、使用方法和注意事項(xiàng)。
一、原理介紹
- 陀螺儀原理
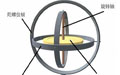
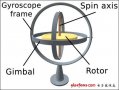
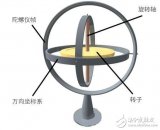
陀螺儀利用角動(dòng)量守恒定律來(lái)測(cè)量物體的角速度。當(dāng)物體發(fā)生旋轉(zhuǎn)時(shí),陀螺儀模塊會(huì)受到一個(gè)與旋轉(zhuǎn)角速度成正比的力矩,通過(guò)測(cè)量這個(gè)力矩的大小和方向,可以得到物體的角速度。 - 三軸陀螺儀原理
三軸陀螺儀模塊由三個(gè)獨(dú)立的陀螺儀組成,分別測(cè)量物體繞X軸、Y軸和Z軸的角速度。通過(guò)結(jié)合三個(gè)方向的角速度測(cè)量值,可以得到物體的姿態(tài)以及其它與角度相關(guān)的信息。
二、使用方法
- 連接電路
將三軸陀螺儀模塊與MCU(單片機(jī))或開(kāi)發(fā)板連接。通常,陀螺儀模塊的輸出信號(hào)是模擬電壓信號(hào),需要使用模數(shù)轉(zhuǎn)換器(ADC)將其轉(zhuǎn)換為數(shù)字信號(hào)。連接時(shí),確保正確接線,避免引腳連接錯(cuò)誤導(dǎo)致測(cè)量結(jié)果不準(zhǔn)確或設(shè)備損壞。 - 初始化
在開(kāi)始使用之前,需要初始化三軸陀螺儀模塊。初始化的過(guò)程包括設(shè)置測(cè)量范圍、濾波器配置等。具體的初始化方法可以參考陀螺儀模塊的使用手冊(cè)或相關(guān)文檔。 - 讀取數(shù)據(jù)
通過(guò)MCU或開(kāi)發(fā)板的ADC模塊讀取陀螺儀模塊輸出的電壓信號(hào),并將其轉(zhuǎn)換為角速度數(shù)值。讀取數(shù)據(jù)時(shí),應(yīng)注意采樣頻率和采樣精度的設(shè)置,以及數(shù)據(jù)的單位和坐標(biāo)系。 - 數(shù)據(jù)處理
得到角速度數(shù)據(jù)后,可以進(jìn)行進(jìn)一步的處理和分析。常見(jiàn)的處理方法包括濾波、積分計(jì)算角度、嵌入式姿態(tài)解算算法等。根據(jù)具體的應(yīng)用需求,選擇合適的數(shù)據(jù)處理方法。 - 輸出結(jié)果
根據(jù)處理后的角速度數(shù)據(jù),可以得到物體的姿態(tài)信息,如俯仰角、橫滾角和偏航角等。將結(jié)果輸出到顯示屏、控制設(shè)備或通信模塊等,以實(shí)現(xiàn)相應(yīng)的功能。
三、注意事項(xiàng)
- 溫度校準(zhǔn)
陀螺儀模塊的測(cè)量結(jié)果可能會(huì)受到溫度的影響,因此在使用之前應(yīng)進(jìn)行溫度校準(zhǔn)。一般情況下,溫度校準(zhǔn)可以通過(guò)外部溫度傳感器和校準(zhǔn)算法來(lái)實(shí)現(xiàn)。 - 坐標(biāo)系轉(zhuǎn)換
陀螺儀模塊的輸出結(jié)果通常是基于其自身固定坐標(biāo)系的。如果需要與其他設(shè)備進(jìn)行數(shù)據(jù)融合或?qū)樱枰獙⑼勇輧x模塊的輸出結(jié)果轉(zhuǎn)換到目標(biāo)坐標(biāo)系。 - 濾波處理
由于陀螺儀模塊的輸出信號(hào)可能存在噪聲,為了提高數(shù)據(jù)的準(zhǔn)確性,可以對(duì)信號(hào)進(jìn)行濾波處理。常見(jiàn)的濾波方法有低通濾波、卡爾曼濾波等,選擇合適的濾波方法可以有效地降低噪聲。 - 數(shù)據(jù)校驗(yàn)與修正
在實(shí)際應(yīng)用中,陀螺儀模塊的輸出結(jié)果可能會(huì)受到其它因素的干擾,例如振動(dòng)、重力等。為了保證數(shù)據(jù)的準(zhǔn)確性,需要進(jìn)行數(shù)據(jù)校驗(yàn)和修正。可以使用陀螺儀模塊自帶的校準(zhǔn)方法,或者結(jié)合其它傳感器進(jìn)行數(shù)據(jù)融合。 - 功耗考慮
陀螺儀模塊在工作時(shí)會(huì)消耗一定的電能,因此在使用時(shí)需要考慮功耗的問(wèn)題。合理選擇工作模式和頻率,以降低功耗并延長(zhǎng)電池壽命。
結(jié)語(yǔ):
三軸陀螺儀模塊作為一種重要的角速度傳感器,具有廣泛的應(yīng)用前景。通過(guò)合理的連接、初始化、數(shù)據(jù)處理和輸出等操作,可以有效地利用陀螺儀模塊來(lái)實(shí)現(xiàn)姿態(tài)測(cè)量、運(yùn)動(dòng)控制和導(dǎo)航等功能。在使用過(guò)程中,要注意溫度校準(zhǔn)、坐標(biāo)系轉(zhuǎn)換、濾波處理等問(wèn)題,以保證數(shù)據(jù)的準(zhǔn)確性和穩(wěn)定性。
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
單片機(jī)
+關(guān)注
關(guān)注
6032文章
44514瀏覽量
632950 -
模塊
+關(guān)注
關(guān)注
7文章
2670瀏覽量
47340 -
電壓信號(hào)
+關(guān)注
關(guān)注
0文章
213瀏覽量
13329 -
三軸陀螺儀
+關(guān)注
關(guān)注
2文章
27瀏覽量
20295
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
手機(jī)中的三軸陀螺儀
iPhone 4采用了微型的、電子化的振動(dòng)陀螺儀,也叫微機(jī)電陀螺儀。iPhone 4是世界上第一臺(tái)內(nèi)置MEMS(微機(jī)電系統(tǒng))三軸陀螺儀的
發(fā)表于 04-10 11:33
?7383次閱讀
三軸陀螺儀和六軸陀螺儀的區(qū)別
(旋轉(zhuǎn))和skopein(看)兩字合為gyro scopei一字來(lái)命名這種儀表。 那時(shí)常聽(tīng)到別人說(shuō)三軸、六軸、九軸陀螺儀,那其中到底有哪些
發(fā)表于 11-08 16:12
三軸陀螺儀是什么_三軸陀螺儀在手機(jī)上的應(yīng)用
三軸陀螺儀是什么 陀螺儀英文名Gyroscope,是一種用來(lái)傳感和維持方向的裝置設(shè)備。陀螺儀是由一個(gè)位于軸心且可旋轉(zhuǎn)的輪子構(gòu)成。
發(fā)表于 08-30 11:52
?8371次閱讀
三軸陀螺儀有什么用_三軸陀螺儀的作用
三軸陀螺儀是慣性導(dǎo)航系統(tǒng)的核心敏感器件,其測(cè)量精度直接影響慣導(dǎo)系統(tǒng)的姿態(tài)解算的準(zhǔn)確性。對(duì)于三軸陀螺儀
發(fā)表于 10-26 20:02
?1.4w次閱讀

三軸陀螺儀工作原理_三軸陀螺儀原理圖
則會(huì)因?yàn)樵O(shè)備改變姿態(tài)而跟著改變,通過(guò)這樣來(lái)檢測(cè)設(shè)備當(dāng)前的狀態(tài)。 而這三個(gè)鋼圈所在的軸,也就是我們三軸陀螺儀里面的
發(fā)表于 10-26 20:30
?4.7w次閱讀

MEMS陀螺儀技術(shù)原理_三軸陀螺儀技術(shù)原理
三軸陀螺儀也叫“微機(jī)械陀螺儀”,而“微機(jī)械陀螺儀”也可稱作“MEMS陀螺儀”,即同時(shí)測(cè)定6個(gè)方向
發(fā)表于 12-01 16:17
?1.5w次閱讀

一文讀懂三軸陀螺儀工作原理和應(yīng)用
三軸陀螺儀:同時(shí)測(cè)定6個(gè)方向的位置,移動(dòng)軌跡,加速。 單軸的只能測(cè)量一個(gè)方向的量,也就是一個(gè)系統(tǒng)需要三個(gè)
發(fā)表于 04-12 11:37
?2.5w次閱讀
分析三軸陀螺儀的工作原理及應(yīng)用
三軸陀螺儀也叫作微機(jī)械陀螺儀,而微機(jī)械陀螺儀也會(huì)被稱作MEMS陀螺儀。它的特點(diǎn)在于能夠同時(shí)進(jìn)行六
發(fā)表于 10-23 11:16
?1.9w次閱讀

陀螺儀三軸六軸區(qū)別
陀螺儀是一種用于測(cè)量物體旋轉(zhuǎn)的裝置,尤其在航空航天領(lǐng)域和導(dǎo)航應(yīng)用中得到廣泛應(yīng)用。陀螺儀根據(jù)其測(cè)量的軸數(shù)可以分為三軸
陀螺儀x和y比例是多少 陀螺儀x軸和y軸是指什么
陀螺儀是一種用于測(cè)量和感應(yīng)物體旋轉(zhuǎn)和轉(zhuǎn)動(dòng)的設(shè)備,它通常由三個(gè)軸組成:x軸、y軸和z軸。在
陀螺儀x軸和y軸的應(yīng)用
陀螺儀是一種用于測(cè)量和感應(yīng)物體旋轉(zhuǎn)和轉(zhuǎn)動(dòng)的設(shè)備,它通常由三個(gè)軸組成:x軸、y軸和z軸。在
發(fā)表于 04-17 15:42
?0次下載
意法半導(dǎo)體推出汽車級(jí)慣性模塊
意法半導(dǎo)體近日發(fā)布了ASM330LHBG1汽車三軸加速度計(jì)和三軸陀螺儀模塊,并配套安全軟件庫(kù),為





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論