 水下無人航行器的研究現狀與展望
水下無人航行器的研究現狀與展望
近年來,隨著新能源等各項新興科學技術的發展,對海洋工程和海洋軍事等的發展需求也變得日益強烈。對海洋的開發和利用的前提是認識海洋,認識海洋就必須對海洋進行調查研究。
對海洋環境的調查主要包括軍用和民用兩部分。軍用調查主要是與反水雷、反魚雷、反水下偵聽等軍用相關的調查;民用調查主要是與海洋科考、海洋資源勘探和利用、海底光纜和管線等民用相關的調查。軍用和民用海洋聲學調查都是通過聲納等設備對水下環境進行成像以及后繼的數學分析處理來完成的。然而,一個獨立的聲納系統無論如何是不可能完成海洋調查任務的,它必須被搭載在一個載體上,在載體的幫助下才可能完成調查任務。
常見的搭載平臺經歷了從水面艦船到載人潛器(HOV)到水下無人航行器(UUV)的歷程。HOV和UUV的研究分別起步于1890年和1960年左右。它們具有活動范圍大、機動性強和作業效率高等優點。近年來,隨著深遠海海洋調查的需求,HOV和UUV扮演著越來越重要的角色。
UUV又分為遙控潛器(ROV)和自主式潛器(AUV)。AUV具備不依賴母船供電、擺脫了ROV中光纜/電纜等的束縛,以無人自主控制為主要控制方式等優點下環境的復雜性,ROV由于有人的參與,執行任務相比AUV更加靈活便捷。
以上就是UUV研究的背景介紹。接下來,本文將對UUV的分類、發展歷史、知名的研究機構、典型產品概況、國內研究現狀、未來發展方向等進行詳細論述。最后,對全文進行了總結。本文的論述側重UUV中最重要的兩類:AUV和ROV。
一、分類、發展歷史與典型產品概述
⒈無人航行器的分類
每類UUV都有一種或數種特定的用途。對不同的用途,UUV的設計和技術指標都有一定的針對性。UUV按體積可分為便攜型、輕型、重型和巨型幾大類。各類UUV的相關基本技術指標見表1。其中,便攜型和輕型主要用于港口、航道和近海淺海的防務與調查等等。重型和巨型由于航程大和載重量大等優點可以用于遠海深海的調查等。
表1 按體積分類的各類UUV的基本技術指標
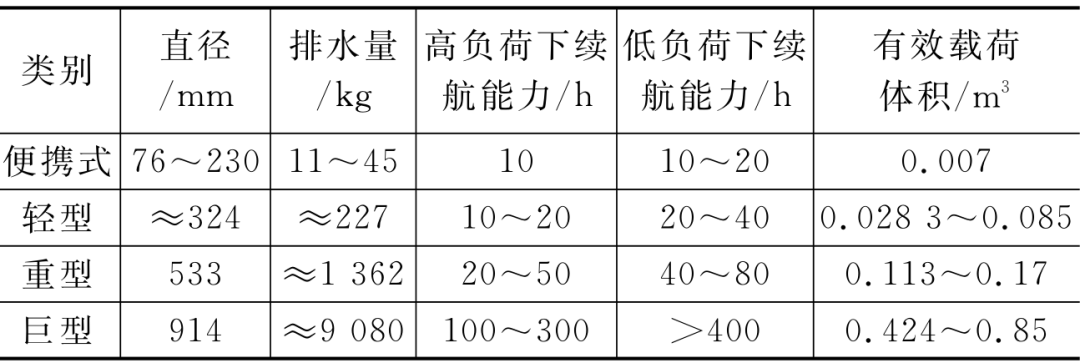
對于用作海洋聲學調查的UUV,要求其具有較高的姿態角、姿態角速度、位置、航速等控制精度,并且還要兼顧穩定性與機動性。同時,還要求該類UUV對各類聲學設備有較強的搭載能力,較強的聲學圖像處理和后處理能力,一定的目標自主判讀能力和高速大寬帶通信能力等等。
ROV在UUV中屬于比較特殊的一類,下面重點介紹ROV系統的組成和分類。ROV系統主要包括水面和水下兩個主體單元。水面單元包括絞車和集控操作臺(一般為一個集裝箱),水下單元就是ROV機器人。水面單元與水下單元通過電纜或光纜連接,水面部分可以向ROV發送控制指令、導航定位信息等。而ROV可以向水面單元反饋自身狀態、水下探測的圖像信息等。由于ROV可以接收水面單元發送的導航定位信息,所以ROV通常搭載低成本的微機光電(MEMS)慣性導航裝置,而AUV由于沒有水面單元進行輔助導航,一般搭載高精度的光纖或激光慣性導航裝置。ROV系統由于有人參與控制、通信與水下圖像判別等,所以可以執行更加復雜、艱巨的水下作業任務。這是相比AUV的一個較明顯的優勢。當然,相對AUV的劣勢就是活動范圍受纜長等因素的限制。
ROV可以分為3種形式:底部爬行式、中水層浮游式以及混合式。
⑴底部爬行式:只能在海底作爬行,它的設計總是為某一個特定的工作而設計的,而不是為一個籠統的目的,早期主要用來進行海底挖溝,用于掩埋管道、電纜等。
⑵中層浮游式:可通過電纜給潛水器提供動力及控制信號,潛水器只能在水中進行前后左右上下運動,同時可以向左或向右旋轉,這種ROV作業任務廣泛。
⑶混合式:這種系統仍然是靠水面提供能源并提供控制,推動力是從輪子、軌道或者拖拉撞擊某一個結構來獲取的。
⒉發展歷史與典型產品概述
1957年,第1臺真正意義的AUV-SPURV在美國華盛頓大學發明。UUV技術比較先進的國家包括美國、加拿大、挪威、英國、法國、德國、俄羅斯和日本等。美國的UUV主要包括先進無人搜索系統(AUSS),曼塔(Manta)航行器、Remus6000等系列航行器、藍鰭金槍魚(Bluefin)系列航行器、MK30潛艇模擬器、Odyssey、Cayibou、遙控環境測量裝置、戰場準備自主式水下航行器、近期水雷偵察系統、遠期水雷偵察系統和任務重組式航行器等等。美國配套的UUV試驗平臺有21UUV、大直徑UUV(LDUUV)和STDV等等。
AUSS是美國海軍空海戰系統中心(SPAWAR)研制的高級水下搜索系統,它首次徹底摒棄了典型的長電纜深潛器方法。AUSS的外形圖見圖1。Menta是一個以最下危險來擴展海軍力量范圍的概念系統,目前有一個技術驗證系統,其全長約10.36m,水面排水量7.25t,負載能力1500kg,最大速度10kn,續航力5h(5kn時)。Menta的外形圖見圖2。Remus6000自主無人水下航行器是Hydroid公司系列AUV產品中工作深度最大的一型。由于Remus6000型AUV采用跟蹤海底的自主作業模式,它可攜帶有效載荷達到很大水深,以測量海水特性,包括電導率、溫度及化學成分,并且通過測深、側掃聲納、磁學、重力學以及照相等測繪和海底成像。2009年6月1日法航AF447航班在大西洋失事,2011年2套Remus6000在失事海域進行了深海搜尋、探測。2011年4月3日Remus6000的側掃聲納以700m的量程、120KHz頻率,發現了一個600m×200m的失事航班遺骸散落區。BluefinAUV系列包括Bluefin-9、Bluefin-12、Bluefin-21、Bluefin-21BP等4個AUV產品,在科學、軍事和商業等應用領域均擁有較高的聲譽。在馬航失聯事件水下搜尋過程中,澳大利亞使用了美國生產的“Bluefin-21”進行搜尋。“Bluefin-21”代表了目前深水搜索的先進水平,該產品裝備有聲學探測和光電成像設備,能夠實現對海底大范圍、高分辨的搜尋與掃描,確定遇險目標位置,并根據水下遇險目標的高清晰光學圖像能夠為救助打撈的決策提供技術支撐。
加拿大的UUV主要包括探索者級系列、ARCS和Theseus等等。其中,探索者級AUV長約4.5m,直徑0.69m。在該AUV的負載段可攜帶各種不同的負載,根據搭載負載的不同,其空氣中的重量在580~800kg之間,其最大潛深為300~500m,其巡航速度在0.5~2.5m/s之間。其攜帶的1.1m長可伸縮通信天線,有助于任務的再規劃,并且可以增加母船和航行器之間的通信距離。
挪威的UUV主要有Hugin(休金)系列。英國的主要包括Autosub和護身符等。法國的主要是Alister系列。德國的主要是海獺系列。俄羅斯的主要包括SKAT、L-2和MT-88等等。日本的主要有R-one、R2D4、URASHIMA和深海6500等等。
國內多家單位開展了UUV相關研究。目前,中國已經研制出了潛深100~11000m的全海深的各類UUV。例如,研制出的“潛龍一號”自主水下航行器最大工作水深為6000m、巡航速度為2kn、最大續航能力24h、空氣中重量1500kg。“潛龍一號”已經完成了大洋第29航次的應用性試驗任務,任務包括近海底聲學和水文等綜合調查。
下面,介紹一下ROV的發展歷史:
⑴嬰兒階段(1953-1965年)。F.Busby R等學者認為第一個ROV很可能是1853年由Dimitri Rebikoff制造的。它叫做POODLE,它是Rebikoff的潛水傳送器PEGASUS的改進產品。隨著水下攝像機的發展和應用,尋找目標的方法是通過將一艘船只系固在某一區域并且移動或牽引一個三角架,這個三角架在一個平底容器中承載著攝像機,并且沿著海底傾斜。用打撈機尋找丟失的物體是一種即沒有效率又很艱苦的方法,但它確實能找到。J.R.R.(Bob)Harter同海軍艦隊局共同找到了減小低效性的一個方法,研制一個易操作的水下攝像系統———移動水下機器人系統。需要構建出一些單元,隨著試驗成功的程度改變,最終形成了一個理想工作的單元———6號系列。它于1961年被交給海軍軍事用品測試局。它被稱作是VARE機器人,它裝有一個蛤殼狀的爪,由海軍實驗室操作和管理。不幸的是,這臺機器有太多的問題而且可靠性較低,所以,它很難離開實驗室被產業化。隨后,它的改進型———纜控水下探索機器人(CURV)被研制出來并得到了一定的推廣應用。
⑵兒童階段(1966-1974年)。在美國海軍大量的搜索和恢復努力下,CURV1996年在西班牙沿海從水下2850英尺(869m)深處確定位置并成功找回一個遺失的氫彈的事件中扮演了重要的角色。在超過它的最大潛水深度的水深眾,而且炸彈還與降落傘的傘繩纏到儀器的情況下,它成功地巡回炸彈并因此立刻名聲大噪。早期的CURV在軍事上很是得意,并以增大其家族成員作為回報。海軍實驗室的資金開始慢慢流向支持額外工作,技術開始進步。為了在淺水環境下工作,更小型的機器被研制,它是用水面上來的液壓控制,它是繼電子SNOOPY之后的產品。隨同其他機器儀器,CURV的功能繼續進化,攜帶單元越來越多。ROV的發展很不幸,它們仍然堅持載人潛水器,需要操作人員在遠程位置進行工作的能力。隨著ROV慢慢地持續發展,最大潛水和載人潛水器盛行起來,到1974年為止,制造了20多臺機器。但是,并沒有真正的大事件讓新型機器和潛水器和載人潛水器去爭奪大家的注意中心,直到1973年,在水深1575英尺下,PISCES3型載人潛水器載著它的兩個乘坐人員慢慢到了氧氣耗盡的底部。最后通過海軍無人系統CURV3營救成功后,達到了轟動性的影響。
⑶青春期階段(1975-1982年)。成熟階段總體來說就是數目的猛然增長,重點是令人莫名其妙獲知無理性的行為的那段時間。盡管ROV迅速發展這段時期是有爭論的,而且很多人還說現在還在繼續著,然而他卻是一座里程碑,發展曲線幾乎成級數增長,到1982年為止已經生產了500多臺機器。
⑷“不成熟階段”(1982-1989年)。盡管ROV在發展和被認同上都有了進步,仍被許多人認為在一段長時間是“不成熟階段”。在這個時期內,ROV出現了一些反復狀態,技術在進步,系統也正在升級中。
⑸成熟階段(1990年至今)。自20世紀90年代到來為止,ROV工業到達了它的成熟期,形成了一個巨大的互動產業,全球有超過100家的制造商。
下面,對本節內容進行歸納總結。水下無人航行器等海洋裝備包含的關鍵技術有:導航算法、水下對接、布放與回收、浮力調節、綠色低功耗推進、軌跡跟蹤與路徑規劃、總體技術,等等。其中,導航與控制是自主式航行器的核心技術。近年來,涌現出大量的導航新技術、控制的新算法等成果,極大地提升了該類裝備的智能化。此外,還有很多關于該研究領域的總體發展趨勢、關鍵技術、總體測試技術等的綜述性文章對本領域的研究做了深入而全面的分析。
二、我國UUV的研究現狀
我國很早就開展了UUV裝備和技術的研究。針對遠程運載、水下防務、信息對抗、大壩及水庫檢查到水下打撈等應用領域,我國對大型、中型、小型和微型UUV都進行了深入研究,有很多成熟的型號。例如,我國研制的MerMan-100型AUV配備有中科院聲學所研制的聲學設備,主要針對海洋監測,水質檢測,軍團協作作業,母船、港口和航道防務等使命任務設計。該AUV的技術特點是采用模塊化設計思路,根據不同的作業任務增減不同作業模塊,有利于便攜作業。海豚一號是一種小型AUV,搭載浙江大學研制的合成孔徑聲納,主要用于探測水下小目標和掩埋目標。
一種典型的AUV組成結構如圖所示。
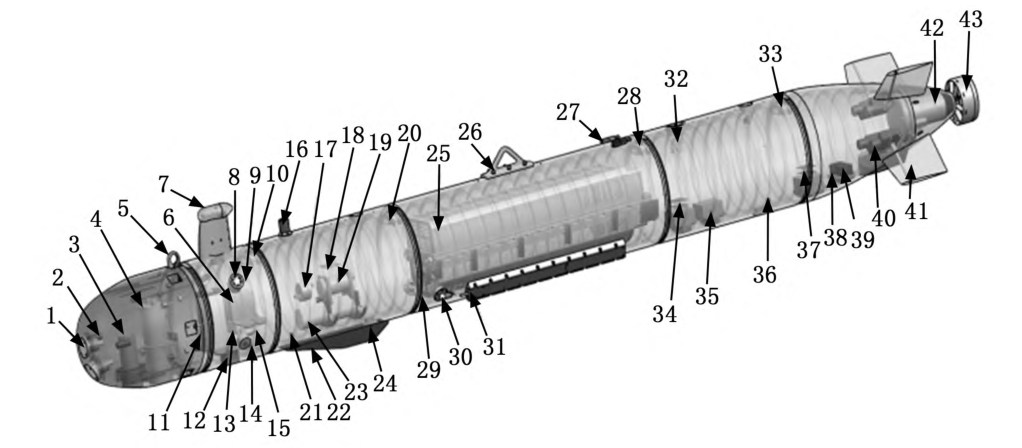
1.避碰高度計;2.水聲應急信標;3.應急拋載;4.深海相機;5.拖曳環;6.中控;7.北斗示位定位裝置;8.調試口;9.交換機;10.快速對接裝置;11.慣導;12.DVL換能器;13.DVL控制盒;14.導航控制段漏水報警板;15.深度計;16.水聲通信換能器;17.水聲通信控制盒;18.聲納存儲處理板;19.閃光燈電源盒;20.快速對接裝置;21.載荷段漏水報警板;22.閃光燈;23.側掃聲納電子艙;24.閃光燈入艙件;25.二次鋰電池組;26.起吊環;27.充電口;28.快速對接裝置;29.能源段漏水報警板;30.聲納入艙件;31.側掃聲納換能器;32.電源開關;33.快速對接裝置;34.繼電器板;35.儀器電電源模塊;36.載荷拓展段漏水報警板;37.艉部單片機板;38.推進段漏水報警板;39.舵機控制器;40.舵機;41.舵板;42.主推電機;43.推進器。
圖 一種典型的AUV組成結構
此外,我國還研制出一款小型搜救ROV,廣泛地應用到各類搶險救災領域。該ROV靈活機動、抗流能力較強。該ROV采用了扁平的立方體外形,利用光纜對它進行操縱。該ROV裝載的是美國的DIDSON聲納,該聲納采用了聲學透鏡技術,成像質量好,分辨率高。該ROV由于小巧靈活,可以適應淺近海的各種復雜地形。同時,它具有較高聲學成像質量,所以它可以高效地執行各類復雜的搜索與救援任務。
國內某研究機構還研制出一款大深度AUV,它主要用于大深度水下目標探測與搜救任務。該型AUV可以在6000m深的海域進行至少24h的目標搜索與探測。該AUV采用的是較先進的十字分布四槳推進,如圖5所示。該AUV的實物如圖6所示。
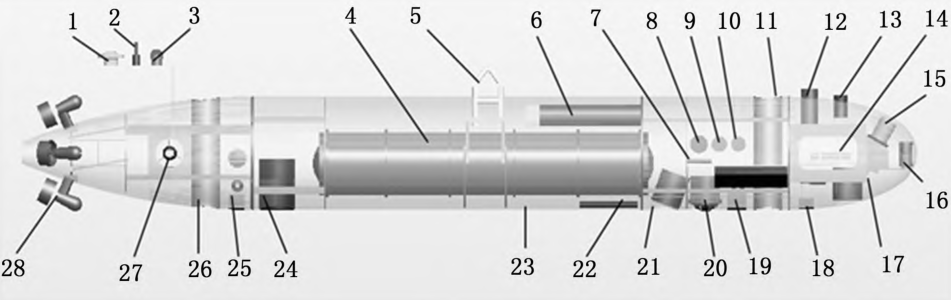
1.衛星定位裝置天線;2.電臺天線;3.頻閃燈;4.耐壓艙;5.吊鉤;6.側掃聲納電子艙;7.深度計;8.水聲通信設備電子艙;9.水聲定位設備電子艙;10.定向導引聲納電子艙;11.垂直推進器(前);12.水聲通信設備換能器;13.水聲定位設備換能器;14.CTD;15.拋纜裝置;16.前視聲納;17.定向導引聲納換能器(水平陣);18.上浮拋載裝置;19.下潛拋載裝置;20.DVL;21.水下相機閃光燈;22.定向導引聲納換能器(豎直陣);23.浮力材料;24.水下照相機;25.平衡拋載裝置;26.垂直推進器(后);27.尾部橫向推進裝置;28.尾部主推進裝置。
該AUV的技術特點主要包括:
⑴深海水下目標自主搜尋與探測系統的功能定位要求,基于模塊化設計技術、輕質結構設計技術、組合導航定位技術等。該AUV提出了深海水下目標自主搜尋與探測系統總體技術方案,具有搜尋效率高、信息交互實時、重量輕、對母船依賴性小等特點。為深海遇險目標搜尋、探測與定位提供基礎平臺技術,為救助打撈工作提供支撐。
⑵基于實時獲取的海底聲納圖像進行自動目標檢測,提高單次水下任務中目標探測效率,同時基于AUV的慣導信息和定位信息,將掃描的聲納圖像合成為帶地理信息參考的海底圖像,為救助打撈工作提供數據支撐。
⑶聲信標定向引導聲納技術充分利用聲信標信號,首次提出將小尺度深度直線基陣作為水下航行器作業引導聲納接收傳感器,實現深海聲信標遠距離測向,將大大延伸水下航行器探測搜尋聲信標作業范圍,使水下航行器作業能快速搜尋并鎖定目標,對提高水下航行器作業效率意義重大。
該AUV的技術難點主要包括以下幾點:
⑴大深度耐壓材料、結構和設備。很多常規設備和材料無法承受6000m的大深度壓力,所以一些耐壓技術需要在借鑒“蛟龍號HOV”的相關經驗,進行自主探索與突破。
⑵多聲納設備的搭載及兼容技術。AUV需要搭載深海地貌、地質探測傳感器。各種任務傳感器的合理選擇、優化配置及正確使用,決定了深海AUV的功能實現情況和整體性能優劣,對AUV搭載的所有任務傳感器以及各種聲學設備進行合理的架裝與集成應用設計,是AUV方案設計中的重要環節。同時,由于多種傳感器同時工作,極易產生相互干擾的問題。在研制中,將采取以下措施:①在滿足總體功能要求下,對傳感器物理位置進行合理布置,減小相互干擾;②對聲設備使用頻率盡量錯開;③對聲設備采用聲同步裝置控制,減少相互干擾。
⑶深海導航定位精度:深度信息的融合和校準。由于此AUV的深度變化范圍大,所以在導航算法中必須融入深度信息。把深度計測量得出的深度信息發送給慣性導航裝置進行有效的融合才可以提高定位精度。另外,大深度航行時無法利用衛星定位系統進行校準,必須依賴水面的聲學定位系統來進行校準。聲學定位的精度比衛星定位系統低,同時聲波還有一定延時需要補償。所以,深度信息的融合和對INS的校準都是該AUV的技術難點。
⑷聲學圖像成像質量和后處理算法。該AUV主要用于目標從探測與搜救,所以對聲學圖像成像質量及后處理算法有較高的要求。為了提高成像質量必須對AUV的姿態和運動參數都進行較精確的控制。同時還要引入對圖像的亮度、清晰度和對比度的增強算法來提高圖像質量。為了進一步提高目標識別的可靠性,該AUV還搭載了光學探測設備。在光學圖像信息的幫助下,進一步優化聲學圖像的后處理算法,可以有效提高目標探測和識別的成功率。所以,聲學圖像成像質量和后處理算法也是該AUV的技術難點。
下面,再介紹一款最早可以實現水下精確導航的國產AUV。
該款AUV的指標為:重量(空氣中)≤40kg、體積≤Ф240×17000mm;最大速度5kn;定位誤差≤15m(RMS);作業水深≥180m;使用海況≤3級;抗流能力≤4kn。
下面,再介紹幾款ROV產品。國產的某款警用的小型ROV主要用于水下安防和反恐等。該系列ROV搭載的是加拿大出產的高性能聲納,可以對水下較小的可疑目標進行探測識別。目前,該系列ROV已成功地運用在運動會和大壩的安防工作中。
某款國產的深海作業ROV主要用于實時水下聲納探測、水下光學觀測、打撈水下沉物、處理可疑目標等。
它的主要技術指標為:深度≥1200m;纜長≥1500m;最大水平前進速度≥2.5kn;最大作業距離≥600m;重量≤1300kg;前視聲納探測距離≥180m;光學觀測能力為2路水下電視(含水下照明燈4個);作業能力為5功能和7功能機械手各一個。
該款水陸兩棲ROV的指標為:重量≤120kg;續航力≥8h;最大工作深度≥100m。該型ROV機器人可水陸兩棲機動、長距離實時操控,能在黑暗、復雜的水下環境中完成環境觀測、搜救、水下通訊等任務;可以建立水下被困現場與水面指揮系統的雙向通訊,為水面指揮系統提供救援決策依據。
以上就是國內目前幾款具有代表性的AUV和ROV產品。下面,具體介紹幾個UUV領域的關鍵技術。這些關鍵技術往往也是制約UUV發展的瓶頸技術,這些技術的突破往往意味著UUV技術的進步。這些技術包括:
⑴總體技術。該技術是指UUV的艙段設計,內部設備與框架的布局配置,重心、浮心、中心的計算,穩定性和操縱性的分析,電氣連接與穿艙件的布局,等等。同樣的一批設備通過優化布局與配置可以使得UUV更加穩定,操控性更好。所以,UUV設計前通過先進的總體技術可以達到事半功倍的效果;
⑵能源與推進。目前常用的能源為一次或二次鋰電池。燃料電池、核動力等是未來的發展方向。最常用的推進方式是推進槳和舵機。近年來,十字舵、X形舵、泵噴和大側斜槳、低速單葉槳等技術被引入到UUV中;
⑶導航與水聲通信。AUV常見的導航方式為高精度光學慣性導航裝置(慣導)與多普勒計程儀進行組合導航。ROV常用MEMS慣導和水聲定位裝置進行組合導航。基于半球諧振陀螺和旋轉調制技術的高精度慣導是未來的發展趨勢。水下通信最大的問題是丟包與延時。近年來的一些新的高速大寬帶水聲通信技術也被逐漸引入到UUV中;
⑷低噪聲與高隱蔽性。對于軍用UUV,靜寂性十分重要。低反射截面的外形、消聲瓦、吸聲材料、吸聲涂層、低噪聲推進(例如:泵噴,等)、低噪聲慣導(例如:半球諧振慣導、光纖慣導等),這些技術都已經在UUV的研制中得到一定的應用;⑸外形設計與外殼加工。一個優化后的外形意味著較低的阻力,從而可以節省能源,提高航程。外形主要分為迎流段、平行主體段和去流段。迎(去)流段艙體由迎(去)流殼體、內部加強筋、各類孔座和艉端蓋等組成。迎(去)流段殼體的線形一般為樣條等各類復雜曲線,且其上開設了各種孔座,所以其流體力學分析很復雜,一般采用有限元軟件對其進行仿真計算。殼體除了承受內部各種設備載荷的重量外,還要承受外部強大水壓的均布載荷。所以其材料選擇和加工制作工藝也十分重要。傳統的外殼通常使用鋁合金,近年來鈦合金和碳釬維等也被應用于UUV的外殼加工中;
⑹浮力調節與應急拋載。常用的浮力調節有水艙、油馕、垂推、調整俯仰角等方式。常用的應急拋載為重量經過仔細核算的鉛塊或鐵塊,使用爆炸螺栓或電磁閥等方式實現拋棄;
⑺布放與回收。常用的布放與回收方式為吊車吊放及回收。近年來,滑道布放、小型AUV的手拋式布放、回收網回收、打撈網回收、自動入塢等技術也得到了一定的發展。
三、未來發展展望
未來AUV的研制會引入越來越多的新技術。這些技術歸納起來總結如下:
⑴功能的多樣化:適時繪圖、三維或多維動畫成像、海底氣象預測、水下偵聽與反偵聽、高精度的定位與導航。未來對海洋調查的需求會越來越多,以后的AUV希望可以快速和實時地進行成像與繪圖,甚至可以進行三維或多維動畫成像。從而可以大大提升資源勘探和水下測繪等的效率。此外,以后的一些應用將進一步擴展,在AUV搭載的計算機里存儲一些氣象數據處理軟件并搭載一些可以采集測量氣象數據的傳感器,那么AUV就可以執行水下海洋氣象預測等新任務。未來的軍事領域必將對AUV提出水下偵聽與反偵聽等新要求。這就要求AUV有較強的聲學信號捕獲能力、較強的微小或偽裝目標的識別能力和一定的作業能力等。所以必須引入一些新的聲學技術以及研制一些特種機械手等來滿足這些需求。在一些特殊任務中離不開高精度的定位與導航技術。如何在得不到有效的外部校準的前提下提升定位精度是一個難點。通過引入一些先進的導航算法有望解決這一難題。
⑵模塊化:針對不同的任務安裝不同的模塊。在MerMan-100的研制已經采用了模塊化這一理念。這是未來AUV的一個發展趨勢,美國的部分Bulefin產品已完全采用模塊化結構。在以后的一些AUV的研制中會進一步加強模塊化的設計理念。針對不同的任務在同一個AUV上安裝不同的模塊,不必去研制不同的AUV,這樣可以大大提高研制效率,降低成本。
⑶智能化:自主任務規劃、自主路徑優化、自主目標判別。人工智能自從誕生以來在各個領域發揮著重要的作用。通過改進AUV的軟件算法和硬件設備,讓AUV具備自主任務規劃、路徑優化和目標判別等功能,則可以大大提高AUV的智能化程度。⑷組網觀測:若干AUV組網、若干AUV與HOV/ROV組網。一個AUV的能力總是有限的,要想對一大片海域進行高效地快速觀測調查,可以采用對大量水下觀測設備進行組網的技術。對若干AUV進行組網,可以加強AUV的實時通信能力,使得眾多AUV可以在某個AUV或母船的指揮下統一行動,提高海洋調查的效率。另外,總有些復雜任務必須依賴人工操作。所以可以把若干AUV與某些HOV或ROV組合起來共同執行一些任務。指揮人員通過HOV或ROV對若干AUV發送指令,當某個AUV探測到可疑目標需要人工作業則由HOV或ROV趕到特定區域去執行任務。
⑸超遠航程:三級式推進、新型布放回收技術。深遠海的調查離不開AUV的超遠航程。以后的AUV計劃采用三級式推進的方式來大大提高航程。首先由母船(水面艦船、潛艇或深海空間站等等)搭載重型AUV向目標海域靠近,然后布放重型AUV。重型AUV接近目標海域后,布放搭載的具有加強探測能力的小型AUV,由它達到目標區域進行研究。通信時也采用逐級上報/下發的模式,可以有效地解決通信距離過長導致的信號過于微弱等問題。三級式推進方式離不開新的布放回收技術。其中AUV的水下對接就是一個核心技術。引入常見的V形剪+彈簧機構、桿+滑蓋、對接管+圓錐導向罩、錐形管狀框架、V字形定位裝置+平臺上的鎖定機構、捕捉臂、機械臂、對接裙口、對接平臺、聲學導引、視覺對準和導向纜等技術。同時,借鑒航天對接里的異體同構周邊和錐+桿這類對接機構,可以有效地解決重型AUV和小型AUV之間的對接難題。母船與重型AUV之間可采用發射管、回收網、吊車和機械手布放等回收方式。
⑹隱蔽性:降噪和抑制回波。在一些敏感海域,隱蔽性是一個不可回避的問題。如何利用一些先進的技術來減小AUV的噪聲和回波是一個技術難點。目前,一些AUV的推進已采用泵噴這類噪聲較小的推進方式。采用一些新結構、新材料和新涂層材料來有效地抑制回波也是未來的一個發展方向。
⑺適應復雜水下地形:線控小型聲納技術。深遠海的水下地形復雜多變,未知因素過多,不得不考慮抵抗惡劣環境和適應復雜地形這類問題。為了能在復雜地形中有效避障,必須提升UUV的探測能力。為了可以探索海溝、狹縫等這類地形地貌,可以采用布放搭載的小型AUV或發射線控小型聲納這樣的技術。
⑻節能環保:新型推進方式。節能環保永遠是人們在科研中所追求的目標。水下滑翔機和波浪滑翔機這類觀測平臺也是一個發展方向。它們分別利用浮力調節機構和水下翼板可以輕松地實現能耗小航程遠的巡航。然而,它們的巡航幾乎只受水密度、洋流和波浪強弱等外界因素的控制,很難實現受控的自主航行。引入先進的衛星通信、太陽能電池、基于模型預測的軌跡跟蹤、智能規劃等技術,使得它們具有一定的受控的自主航行能力,勢必大大擴展這類航行器的應用范圍。
下面介紹ROV的發展趨勢。從目前國外ROV的研制技術來看已經相當成熟,并已實現了模塊化和系列化。隨著海洋經濟的發展和軍事需求的增加,ROV將朝著以下幾個方向發展:
⑴向更專業化發展:這是市場和技術的共同需求。盡管ROV功能繁多,能執行各種各樣的任務。然而,僅靠一臺ROV很難完成復雜的作業任務。所以,未來ROV將根據特定的任務需求搭載最合適的專用作業設備。在ROV載荷盡量輕的前提下,最大地提升ROV的作業效率,縮短作業時間。
⑵向操作更加簡便、快捷發展:未來的ROV,人機交互會更好。在人機工程迅猛發展的當代,ROV的操控同樣需要不斷地完善。需要從操作性能、控制精度、人機交互界面、響應速度等多方面不斷地改進,使得操作更加簡便、快捷。
⑶向ROV與AUV技術融合發展:正如前面的分析,ROV和AUV各有利弊。如果可以取長補短將它們有效結合起來,勢必得到更高的作業效率,縮短作業時間。一種常用的組合方式是與母船近距離的復雜任務(例如:水下礦產或生物采樣等)由ROV執行,而遠距離的搜索、探測等任務由AUV執行。還可以選擇ROV與AUV協同作業,ROV作為領航者和團隊的指揮帶領團隊進行高效的作業。ROV和AUV具體組合方式可以根據任務需求進行優化與調整。
四、結束語
綜上所述,盡管我國已成功研制出多型UUV,但目前尚未形成系列化產品,UUV在國內的應用依然有很大的發展空間。我國擁有300萬平方公里的海洋國土,海岸線長1.8萬平方公里,內陸湖泊、重要水庫大壩不計其數。若能充分利用各種成熟技術,大力開發UUV,將其大量用于海洋調查開發、重要水道安全巡邏或排障、重要水庫大壩監控巡查或檢修等領域,不但可以大大降低人員水下作業風險,而且能夠取得重大經濟效益。UUV的研制將趕上這個時代的浪潮,瞄準新方向不斷地創新、突破,勢必在我國的海洋研究、海洋工程技術和海洋裝備發揮重要的作用。
文章來源:《計算機測量與控制》(2023年第2期)
審核編輯:黃飛
-
AUV
+關注
關注
0文章
11瀏覽量
10869 -
水下航行器
+關注
關注
0文章
15瀏覽量
8635 -
uuv
+關注
關注
1文章
5瀏覽量
3927
原文標題:水下無人航行器的研究現狀與展望
文章出處:【微信號:robotmagazine,微信公眾號:機器人技術與應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
水下航行器模擬平臺系統的總體架構是什么?
運載平臺怎么實驗水下航行器的功能?
基于Vega Prime實時視景仿真水下航行器應用
使用無人駕駛船部署自主水下航行器的新系統
水下航行器控制半實物仿真系統的組成原理、特點及應用研究

水下航行器輔助的水下地理機會路由協議

水下航行器水下高度、航向和姿態測量方案的介紹
DARPA引領無人水下航行器(UUV)電源技術的進步
水下航行器電機的SiC MOSFET逆變器設計






 工商網監
工商網監
評論