") RTK、PPP與RTK-PPP?一文帶您認(rèn)識(shí)高精定位及如何進(jìn)行高精定位GNSS測試!
RTK、PPP與RTK-PPP?一文帶您認(rèn)識(shí)高精定位及如何進(jìn)行高精定位GNSS測試!
高精度定位與相關(guān)技術(shù)
隨著全球定位技術(shù)的不斷發(fā)展,人們對精準(zhǔn)定位的需求也逐漸增加,GNSS技術(shù)已經(jīng)成為了自動(dòng)駕駛等許多關(guān)鍵領(lǐng)域的基礎(chǔ),而伴隨著新興技術(shù)的出現(xiàn)與硬需求,GNSS的定位精度要求也越來越高,因此高精定位技術(shù)也越發(fā)重要。
關(guān)于GNSS與定位精度
1.GNSS技術(shù)發(fā)展
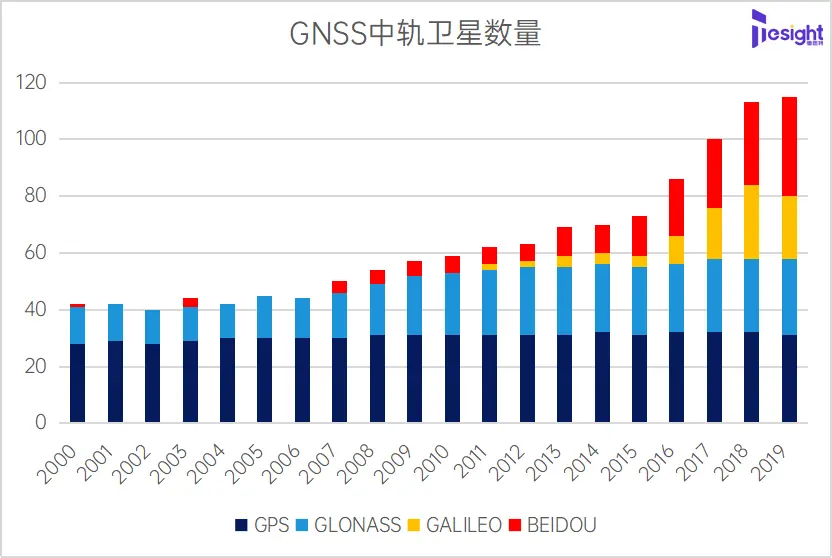
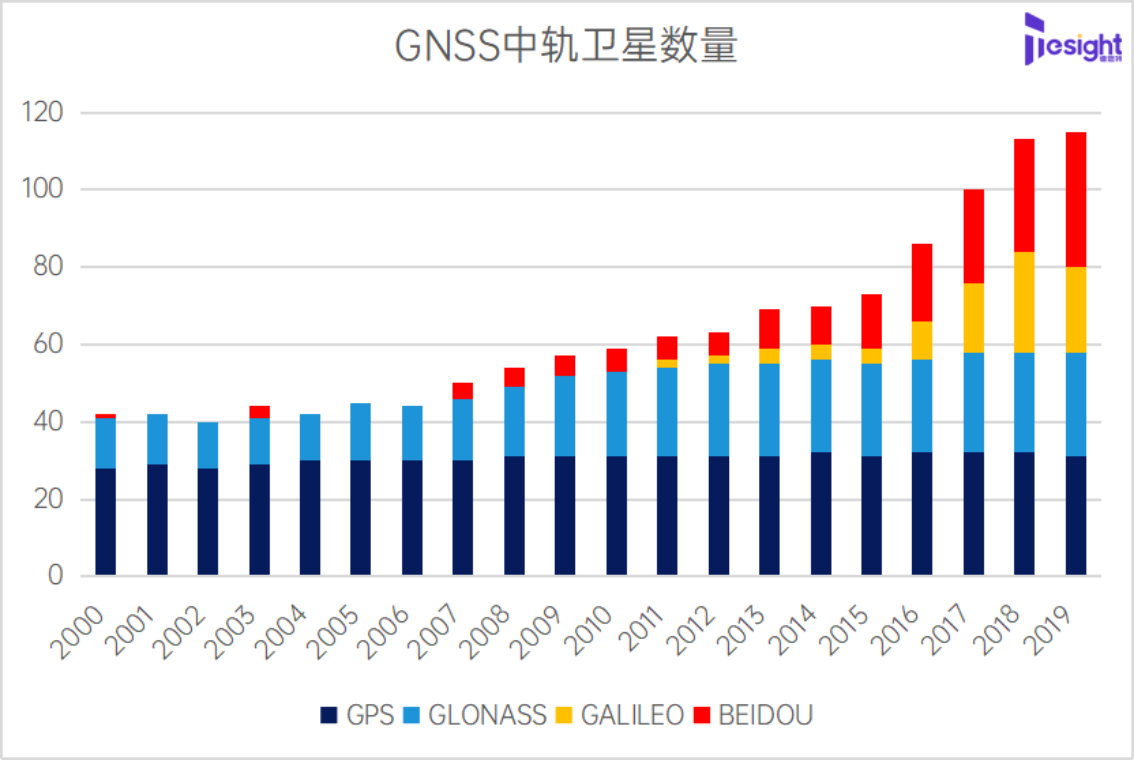
GNSS技術(shù),即全球定位衛(wèi)星系統(tǒng),目前有美國的GPS、俄羅斯的GLONASS、歐洲的Galileo和中國的北斗,可以為全球用戶提供高精度的定位、導(dǎo)航和定時(shí)服務(wù)。GNSS系統(tǒng)的衛(wèi)星數(shù)量在不斷增加,目前已經(jīng)超過100顆。這意味著更多的衛(wèi)星可用于提供全球定位服務(wù),從而提高了定位的精確性和覆蓋范圍。
2.不同技術(shù)的定位精度
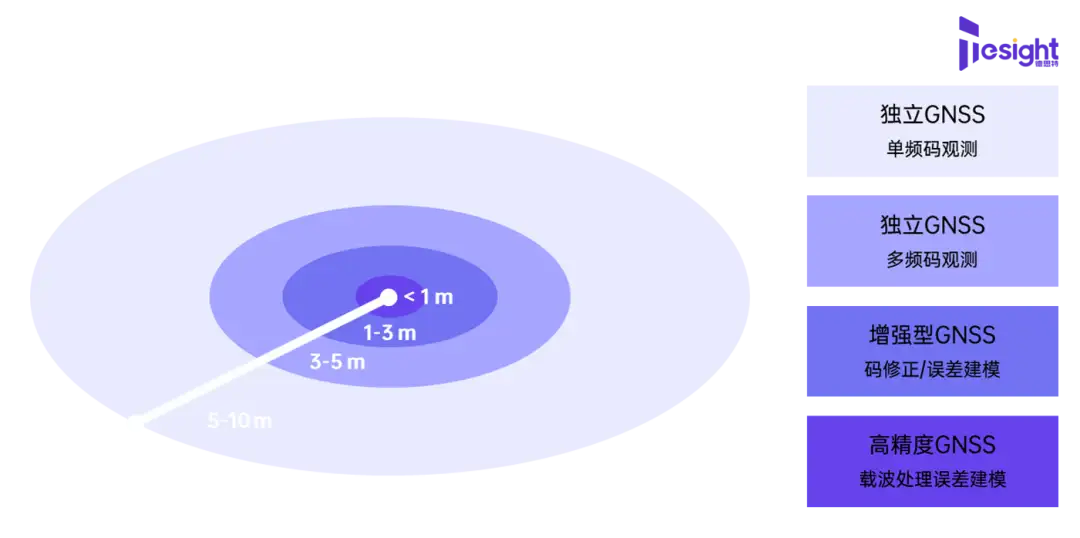
最初的GNSS接收器主要依賴于獨(dú)立單頻測量,其定位精度在5-10米左右。這種技術(shù)僅使用衛(wèi)星的偽距數(shù)據(jù)來計(jì)算位置,精度有限。
在技術(shù)進(jìn)步的推動(dòng)下,多頻接收器開始廣泛使用,接收器能夠同時(shí)使用不同頻段的信號(hào)。這提高了信號(hào)的質(zhì)量和精度,并有助于減小定位誤差,其定位精度約在3-5m。
隨著GNSS技術(shù)進(jìn)一步發(fā)展,來越多的增強(qiáng)方法被應(yīng)用到GNSS技術(shù)中,如基于偽距的距離修正和誤差建模,允許對衛(wèi)星信號(hào)的誤差進(jìn)行建模和校正,從而提高了定位精度。即通過糾正大氣延遲、鐘差、衛(wèi)星軌道誤差等因素,可以將位置精度提高到1-3米,可以實(shí)現(xiàn)在不同應(yīng)用領(lǐng)域中的高精度定位,包括民航、農(nóng)業(yè)、測繪等。
目前,GNSS技術(shù)已經(jīng)演進(jìn)到了能夠?qū)崿F(xiàn)高精度定位的階段,包括使用載波處理技術(shù)來處理衛(wèi)星信號(hào),實(shí)施更精確的誤差建模,以及采用RTK(實(shí)時(shí)差分定位)和PPP(精密點(diǎn)對點(diǎn))技術(shù)。使用這些方法,定位精度可以進(jìn)一步提高到小于1米,滿足了對精準(zhǔn)定位的高要求,如測繪、自動(dòng)駕駛汽車、無人機(jī)和精密農(nóng)業(yè)等領(lǐng)域的需求。
3.定位誤差與消除方法
(1)誤差來源
然而由于設(shè)備、環(huán)境、衛(wèi)星位置等各種原因,GNSS定位不是完全準(zhǔn)確的,會(huì)受到多種誤差的影響,導(dǎo)致最終的定位有所偏差。常見的誤差來源有:
● 電離層誤差(lonospheric errors)
● 對流層誤差(Tropospheric errors)
● 衛(wèi)星軌道誤差(Satellite orbit errors)
● 衛(wèi)星時(shí)鐘誤差(Satellite clock errors)
● 傳輸噪聲與多徑(RX noise and multipath)
● 接收機(jī)時(shí)鐘誤差(Receiver clock errors)
● 用戶等效測距誤差(UERE,user equivalent ranging error)
● 水平精度因子(HDOP,horizontal dilution of precision)
(2)如何消除誤差
對于電離層誤差,其影響因素主要是仰角、頻率、正上方電子總量TEC,我們可以通過嵌入klobuchar電離層模型參數(shù)進(jìn)入導(dǎo)航信息,降低近50%的誤差。此外,也可以通過多頻方法,獲取電離層自由偽距參數(shù),采用距離校正計(jì)算,幾乎可以消除電離層誤差。
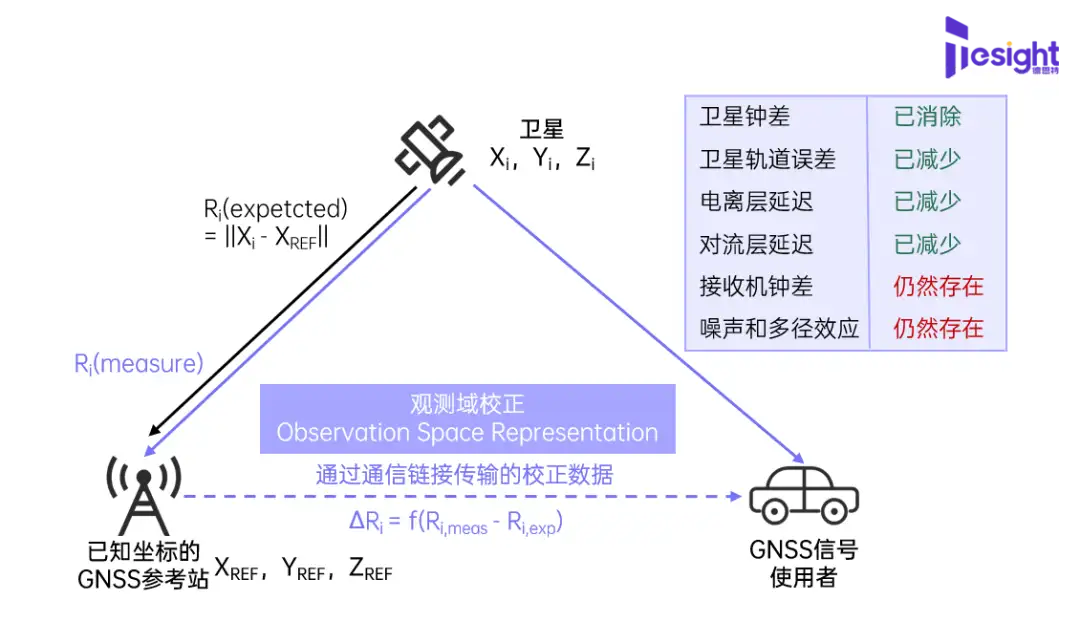
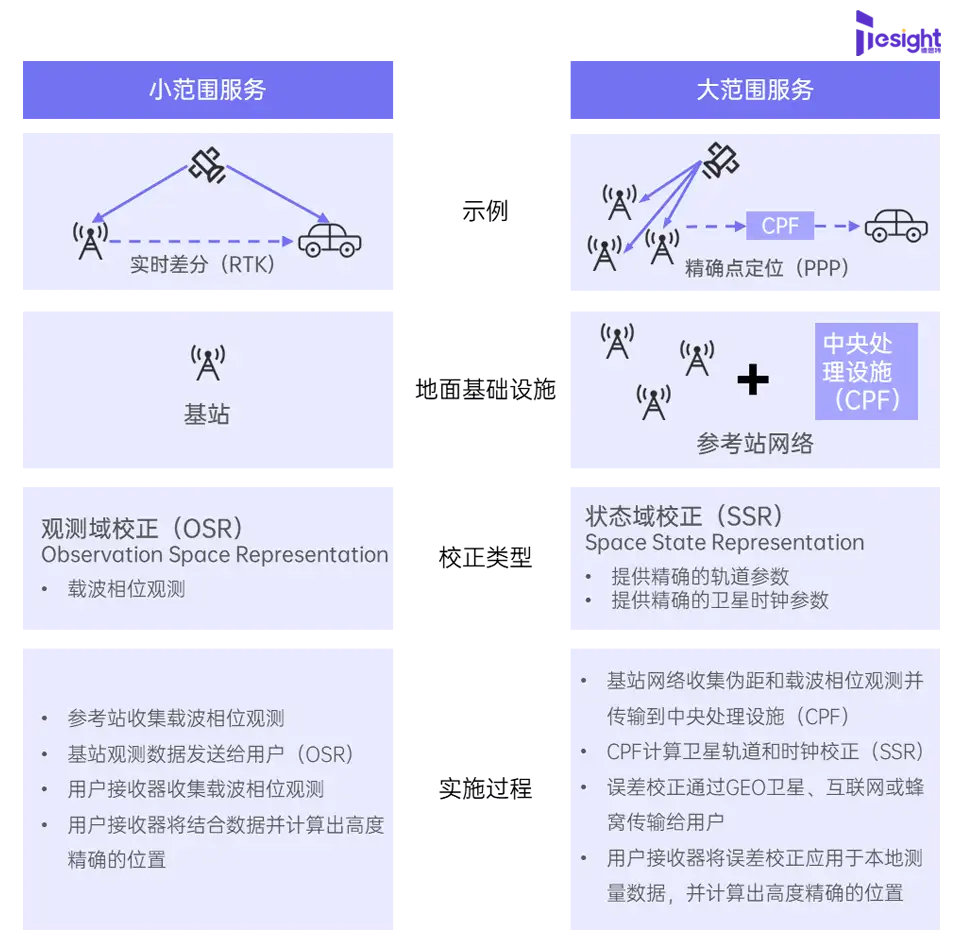
此外通過引入地面觀測站的方式可以實(shí)現(xiàn)對衛(wèi)星鐘差、衛(wèi)星軌道誤差、電離層誤差、對流層誤差的減少或消除。根據(jù)覆蓋區(qū)域和實(shí)現(xiàn)方式不同實(shí)現(xiàn)機(jī)制主要有兩種:
● Observation Space Representation,觀測域校正——小范圍校正,直接利用基站進(jìn)行校正信息傳輸,例如RTK。
● State Space Representation,狀態(tài)域校正—— 大范圍乃至全球覆蓋,利用中心處理站解算與處理校正信息,并利用互聯(lián)網(wǎng),衛(wèi)星網(wǎng)絡(luò)等傳輸,例如PPP。
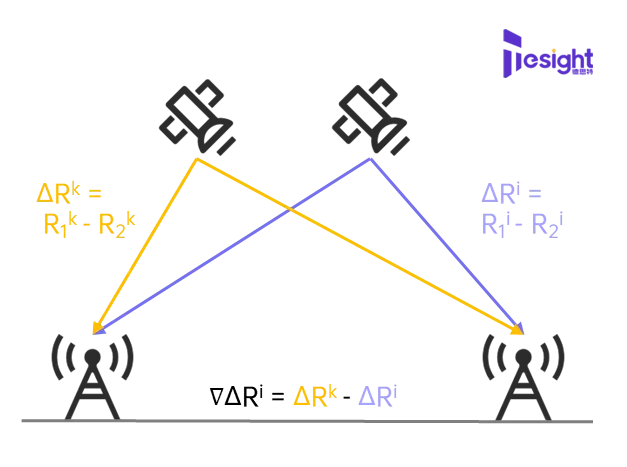
(3)通過雙差分方式消除接收機(jī)誤差
雙差分(Double-Difference)是全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)定位中的一種差分定位方法,旨在減小或消除定位中的一些誤差來源。與單差分定位不同,雙差分同時(shí)考慮了兩個(gè)接收器之間的相對位置差異以及兩個(gè)衛(wèi)星之間的相對位置差異。這個(gè)方法在相對定位和高精度定位應(yīng)用中非常有用。通過該方式可以有效減小或消除衛(wèi)星鐘差、衛(wèi)星軌道誤差、電離層誤差、對流層誤差,此外還可以消除接收機(jī)鐘差。
(4)其他辦法
此外,可以配之其他復(fù)雜方法,削弱或消除多徑與噪聲影響,如載波模糊度解算與基線處理。
RTK、PPP與RTK-PPP技術(shù)
1.RTK技術(shù)
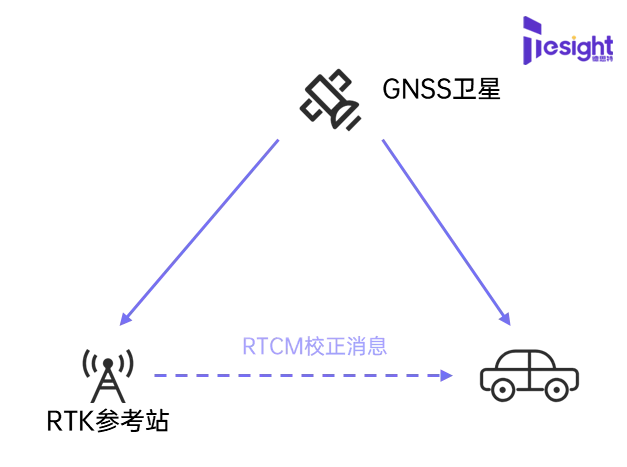
RTK(Real-Time Kinematic)技術(shù)基于兩個(gè)GNSS接收器,其中一個(gè)充當(dāng)基準(zhǔn)站,另一個(gè)作為流動(dòng)站。基準(zhǔn)站精確定位并連續(xù)跟蹤衛(wèi)星信號(hào),同時(shí)記錄數(shù)據(jù),而流動(dòng)站接收衛(wèi)星信號(hào)以定位自身,并從基準(zhǔn)站獲取包含校正數(shù)據(jù)的RTCM信息來通過差分運(yùn)算校正誤差。這一過程實(shí)現(xiàn)了毫米級(jí)的高精度三維實(shí)時(shí)定位,依賴于實(shí)時(shí)傳輸?shù)男U龜?shù)據(jù),適用于測繪、建筑、農(nóng)業(yè)、無人機(jī)導(dǎo)航等多個(gè)應(yīng)用領(lǐng)域。
RTK技術(shù)的主要特點(diǎn)是在實(shí)時(shí)中提供毫米級(jí)別的定位精度。RTK是基準(zhǔn)站與流動(dòng)站之間的直接校正信息傳輸,因此可以解決衛(wèi)星、傳輸軌跡以及接收機(jī)本身的誤差問題,但覆蓋區(qū)域小,并且精度隨著兩者之間的距離增加而降低。
2.PPP技術(shù)
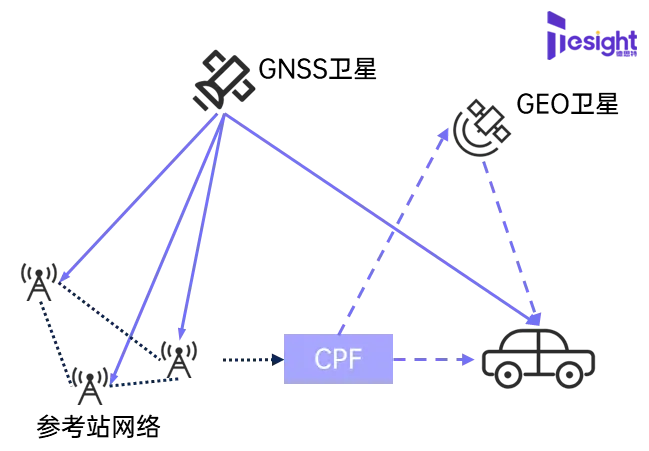
PPP(Precise Point Positioning)技術(shù)是一種高精度的全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)定位技術(shù),它是一種廣域的部署方案,通過CPF解算衛(wèi)星誤差并傳輸給接收機(jī)做校正,允許用戶實(shí)現(xiàn)毫米級(jí)的三維位置精度,而無需依賴差分基站。與差分定位技術(shù)不同,PPP技術(shù)不需要在接收器和差分基站之間建立通信鏈接。用戶只需單獨(dú)的GNSS接收器和訪問PPP校正數(shù)據(jù)的互聯(lián)網(wǎng)連接,即可進(jìn)行高精度定位。PPP技術(shù)適用于全球范圍,因?yàn)樗灰蕾囉谔囟ǖ乩韰^(qū)域內(nèi)的差分基站,只需有足夠的衛(wèi)星可見性即可進(jìn)行定位。但通常需要更長收斂時(shí)間的衛(wèi)星信號(hào)觀測來實(shí)現(xiàn)高精度,因此對于需要長時(shí)間持續(xù)定位的應(yīng)用更為適用。
3.二者的對比
本質(zhì)上來講,這兩種技術(shù)都是在傳統(tǒng)GNSS定位的基礎(chǔ)上,使用增強(qiáng)技術(shù)來提高GNSS定位精度的,是在不同校正域上的延伸與實(shí)現(xiàn)。
4.PPP-RTK技術(shù)
在上述的介紹中可以發(fā)現(xiàn),RTK技術(shù)與PPT技術(shù)各有優(yōu)劣——RTK定位時(shí)間快,但是覆蓋距離小;PPP定位精度高,全球覆蓋,但是收斂時(shí)間慢,且部署成本較高。隨著需求和技術(shù)的發(fā)展,將PPP與RTK結(jié)合的技術(shù)(PPP-RTK)也出現(xiàn)了。
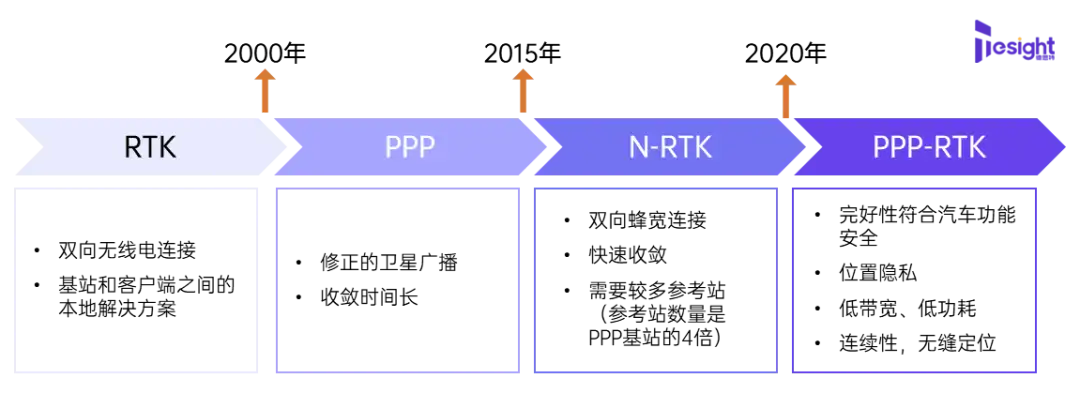
PPP-RTK是未來的主流與趨勢,PPP-RTK狀態(tài)域具備完好的服務(wù)優(yōu)勢,可以實(shí)現(xiàn)全覆蓋、高精度、收斂快的高精度GNSS定位技術(shù)。
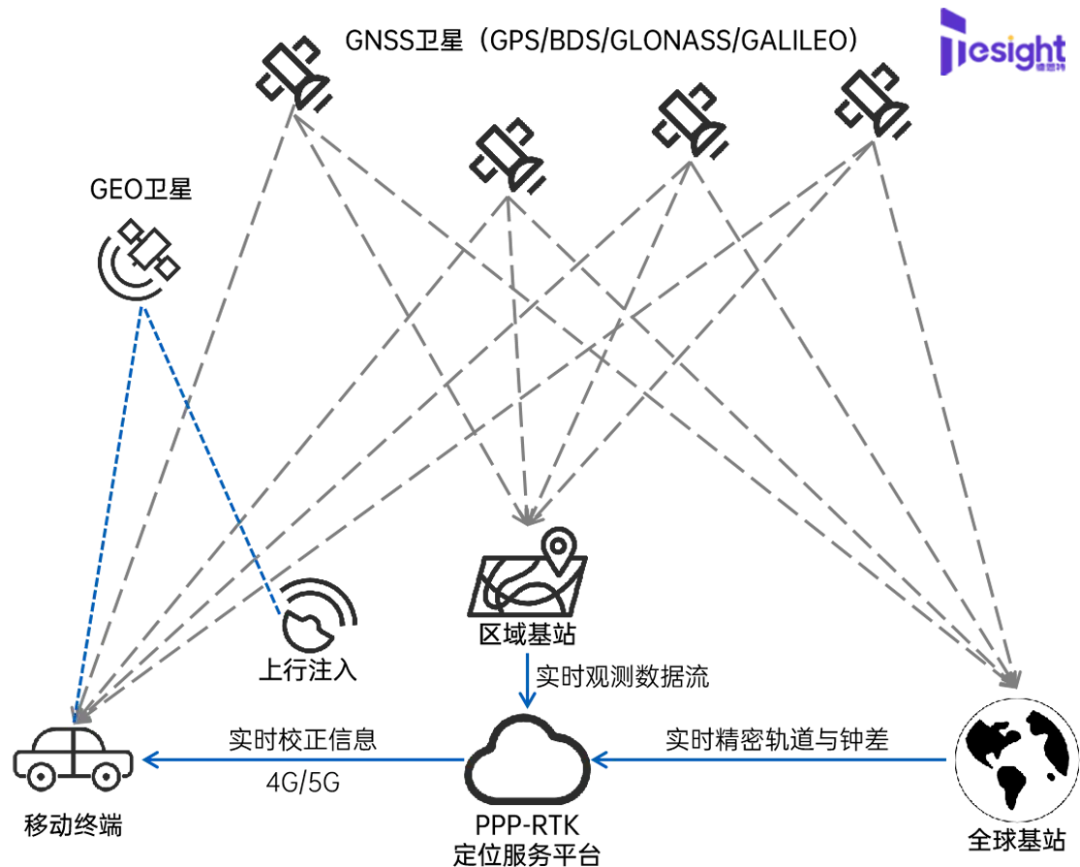
其主要原理為使用全球基站確定衛(wèi)星鐘差、衛(wèi)星軌道誤差;使用區(qū)域基準(zhǔn)站對電離層誤差、對流層誤差等區(qū)域性誤差進(jìn)行了分析,建立整網(wǎng)的電離層延遲、對流層延遲等誤差模型;并將全球和區(qū)域的誤差產(chǎn)品發(fā)送給移動(dòng)終端進(jìn)行定位。總的來看,具有以下優(yōu)勢:
● 全國覆蓋
PPP-RTK僅需不超過1000基站即可實(shí)現(xiàn)全國覆蓋,極大減少基站建設(shè)的成本投入,提高服務(wù)覆蓋范圍。
● 單向播發(fā)
PPP-RTK采用單向廣播模式,更易實(shí)現(xiàn)海量用戶并發(fā)。同時(shí),單向播發(fā)的服務(wù)模式能有效的保護(hù)用戶隱私。
● 連續(xù)性
PPP-RTK對各項(xiàng)誤差采用廣域統(tǒng)一建模,提供全國范圍內(nèi)的無縫連續(xù)定位服務(wù)。
● 完好性
PPP-RTK通過將GNSS各類誤差分別建模并提供給用戶,各類誤差相互獨(dú)立,可分別進(jìn)行完好性監(jiān)測并生成相應(yīng)的完好性產(chǎn)品,實(shí)現(xiàn)功能安全。

如何進(jìn)行高精度GNSS測試
可以看到近些年依托于GNSS的高精定位技術(shù)發(fā)展迅猛,大量的新技術(shù),新應(yīng)用,新方向?qū)映霾桓F。如何在項(xiàng)目前期進(jìn)行相關(guān)算法、環(huán)境、項(xiàng)目與技術(shù)的測試與檢驗(yàn),成為了一個(gè)重要的話題。
1.怎么樣的GNSS測試方法是好的測試?
(1)可重復(fù)性,可控性
進(jìn)行高精度的GNSS測試需要在可重現(xiàn)和可控的環(huán)境中對GNSS接收器進(jìn)行測試,特別是在項(xiàng)目的初期,當(dāng)有很多參數(shù)和特性還不清楚時(shí)。通過高效且準(zhǔn)確地控制測試場景和環(huán)境,可以實(shí)現(xiàn)精確的一致重復(fù)性測試,這對于項(xiàng)目的快速推進(jìn)和問題的解決至關(guān)重要。
(2)可操作性
進(jìn)行GNSS測試需要能支持對于設(shè)備與系統(tǒng)的實(shí)時(shí)操作,例如按照特定需求來設(shè)置制定的時(shí)間、地點(diǎn)信息,注入特定的“錯(cuò)誤”和相應(yīng)的校正數(shù)據(jù)等,用于對設(shè)備進(jìn)行確定性驗(yàn)證與可預(yù)期的功能測試。
(3)HIL能力:
伴隨著GNSS與定位導(dǎo)航產(chǎn)品的集成度越來越高,GNSS測試需要能夠接入現(xiàn)有系統(tǒng)進(jìn)行實(shí)時(shí)在環(huán)仿真,允許工程師近乎真實(shí)的模擬與測試應(yīng)用場景,以驗(yàn)證其性能和功能,減少潛在風(fēng)險(xiǎn),加快產(chǎn)品開發(fā),并提高系統(tǒng)質(zhì)量,因此要求測試能夠支持在組件或整車級(jí)別將系統(tǒng)作為“黑匣子”進(jìn)行測試。
(4)實(shí)時(shí)性:
在測試GNSS時(shí),尤其是應(yīng)用HIL仿真方式時(shí),需要能夠使用來自實(shí)時(shí)GNSS的實(shí)時(shí)網(wǎng)絡(luò)校正數(shù)據(jù)進(jìn)行測試。系統(tǒng)的延遲越低,實(shí)施性越好,在自動(dòng)駕駛與高精定位行業(yè)的應(yīng)用是十分重要的,一方面有助于真實(shí)模擬極限情況下的決策與響應(yīng)能力,另一方面如果延遲太高,就會(huì)導(dǎo)致測試系統(tǒng)的實(shí)際響應(yīng)與實(shí)際硬件的響應(yīng)之間存在差異,從而影響測試的準(zhǔn)確性。高延遲可能導(dǎo)致測試結(jié)果不可靠,甚至誤導(dǎo)性,因此需要盡量降低延遲以獲得可靠的HIL測試結(jié)果。
(5)性價(jià)比:
由于高精GNSS測試需要對現(xiàn)有的測試方案做改進(jìn),在面向新興應(yīng)用時(shí)都希望測試系統(tǒng)足夠高效,減少所需的時(shí)間和資源;此外,在面對測試標(biāo)準(zhǔn)與方式有改變時(shí),現(xiàn)有測試方案可以快速迭代、改變并無需花費(fèi)大量的成本。
2.測試方法
GNSS模擬器是GNSS高精測試的關(guān)鍵產(chǎn)品,是基于軟件定義架構(gòu)的GNSS模擬器,是依托“依托軟件引擎,開放硬件平臺(tái),高效開放地完成GNSS仿真”的自有Skydel GNSS仿真引擎的全面解決方案。
GNSS模擬器可以模擬接收機(jī)的接收口徑上的GNSS信號(hào),模擬不同衛(wèi)星的信號(hào)(包括位置、速度、時(shí)間信息),模擬誤差和干擾,如多徑效應(yīng)、大氣延遲等,實(shí)現(xiàn)近乎真實(shí)的場景模擬。
可以幫助用戶最大程度上高效快速的完成各階段測試:
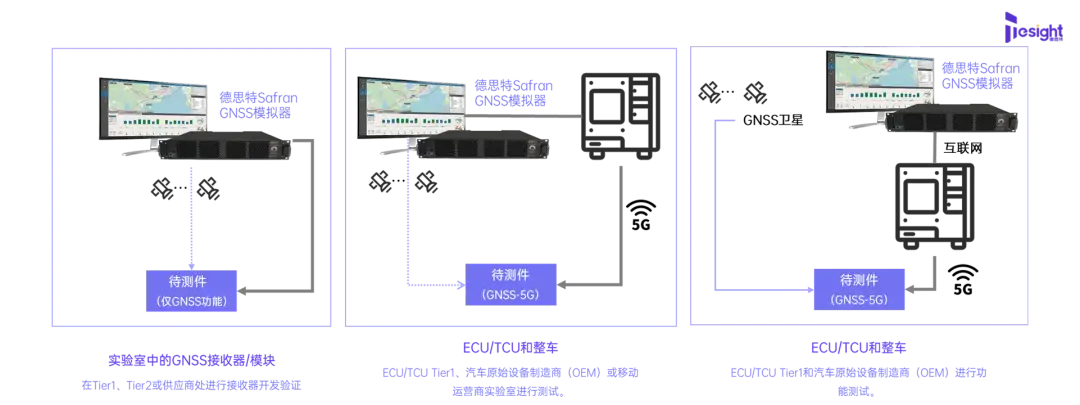
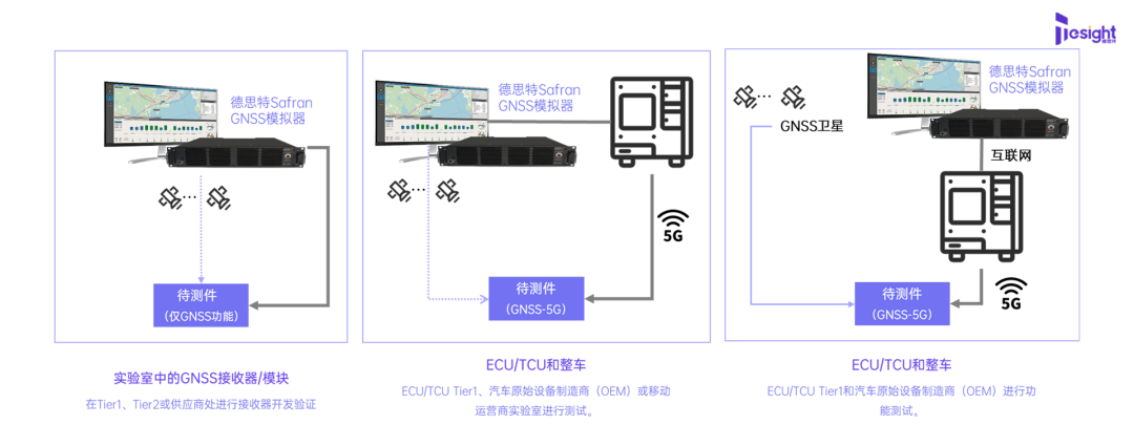
① 在Tier1、Tier2或供應(yīng)商處進(jìn)行接收器開發(fā)驗(yàn)證,通過輻射或傳導(dǎo)方式對待測件的GNSS功能做實(shí)驗(yàn)室級(jí)別測試。
② ECU/TCU Tier1、汽車原始設(shè)備制造商(OEM)或移動(dòng)運(yùn)營商實(shí)驗(yàn)室進(jìn)行前期的ECU/TCU和整車的GNSS功能測試,結(jié)合基站模擬器完成對GNSS+5G的融合測試。
③ ECU/TCU Tier1和汽車原始設(shè)備制造商(OEM)進(jìn)行完全迫真的GNSS全面功能測試,完成結(jié)合5G,GEO網(wǎng)絡(luò),RTK/PPP基站等的全面高精度GNSS定位測試,對RTK,PPP,RTK-PPP設(shè)備的功能與性能進(jìn)行完整的驗(yàn)證與測試。
GNSS仿真測試在未來自動(dòng)駕駛等新興領(lǐng)域中扮演著至關(guān)重要的角色,用于提前確保定位導(dǎo)航功能的可靠性。GNSS模擬器是實(shí)現(xiàn)GNSS高精度測試的關(guān)鍵工具,為用戶提供了可控和可重復(fù)的測試方案,同時(shí)允許用戶實(shí)時(shí)編輯和定義自己的GNSS仿真測試場景。利用GNSS模擬器,用戶可以實(shí)現(xiàn)小于5 ms延遲的HIL閉環(huán)仿真,使測試盡可能接近真實(shí)情況。該模擬器基于軟件定義架構(gòu),為用戶提供了靈活性和可擴(kuò)展性,使其能夠適應(yīng)未來測試需求的變化;而這樣的架構(gòu),不僅保證了整體成本的合理性,還提供了出色的性價(jià)比。
自動(dòng)駕駛與高精度定位的其他技術(shù)
1.什么是POS?
高精度POS(positioning and orientation system)即定位定姿系統(tǒng),是指一種精確測量和確定物體在地球表面或三維空間中的準(zhǔn)確位置的技術(shù)。高精度POS通常倚賴衛(wèi)星導(dǎo)航系統(tǒng)(如全球定位系統(tǒng),GPS)的精確測量,以及其他傳感器(如慣性測量單元,IMU)和校準(zhǔn)技術(shù),以提供高精度的位置信息。
在自動(dòng)駕駛領(lǐng)域里,隨著自動(dòng)駕駛技術(shù)的成熟和自動(dòng)駕駛行業(yè)的逐漸發(fā)展,對數(shù)據(jù)精度的要求越來越高,其中高精度POS將逐步取代GNSS定位與IMU作為源數(shù)據(jù)的來源,提供更高精度、形式更豐富的自動(dòng)駕駛數(shù)據(jù)。

2.什么是DGNSS?
差分全球?qū)Ш叫l(wèi)星系統(tǒng)(DGNSS),是對GNSS的增強(qiáng),旨在糾正GNSS系統(tǒng)中的部分錯(cuò)誤和不準(zhǔn)確性,從而提供更準(zhǔn)確的定位信息。通常,訪問校正信息可使差分GNSS接收器比其他接收器更準(zhǔn)確;消除這些誤差后,GNSS接收器有可能達(dá)到高達(dá)10厘米的精度。
該系統(tǒng)所基于的假設(shè)是,彼此非常接近(例如,在幾百公里內(nèi))的任何兩個(gè)接收器都將經(jīng)歷相同的大氣誤差。因此,差分GNSS使用至少兩個(gè)GNSS接收器。一個(gè)接收器必須位于一個(gè)精確的已知位置;這個(gè)接收器用作基站或參考站,另一個(gè)稱為流動(dòng)接收器。基站接收器計(jì)算其由GNSS衛(wèi)星計(jì)算出的位置與其實(shí)際已知位置之間的差異。差異是糾錯(cuò)因子,然后將其傳輸?shù)搅鲃?dòng)接收器(或多個(gè)流動(dòng)接收器)以校正其測量結(jié)果。可以使用無線電信號(hào)在現(xiàn)場實(shí)時(shí)應(yīng)用更正后的信息。
差分GNSS可以使用固定的地面參考站網(wǎng)絡(luò)來發(fā)送GNSS衛(wèi)星廣播的位置與已知固定位置之間的差異。DGNSS可以指任何類型的地基增強(qiáng)系統(tǒng)(GBAS),全世界有許多正在使用的地面系統(tǒng)。
從軌道衛(wèi)星而不是地面發(fā)射器傳輸校正的類似系統(tǒng)稱為WAAS(廣域增強(qiáng)系統(tǒng))或WADGPS(廣域差分全球定位系統(tǒng))。有時(shí)作為同義詞使用,基于衛(wèi)星的增強(qiáng)系統(tǒng) (SBAS) 可以包括軌道衛(wèi)星系統(tǒng),它已在世界其他地區(qū)實(shí)施,例如EGNOS、MSAS、QZSS和GAGAN。如今,大多數(shù)商業(yè)GNSS接收器都支持一種帶有SBAS的差分校正形式。
RTK就是在DGNSS的基礎(chǔ)上,進(jìn)一步利用衛(wèi)星信號(hào)的載波相位對這種情況進(jìn)行了修正,因此可以使定位精度進(jìn)一步達(dá)到厘米級(jí)。
3.什么是A-GNSS?
A-GNSS(Assisting-GNSS,輔助GNSS,又稱網(wǎng)絡(luò)增強(qiáng)衛(wèi)星定位系統(tǒng) )是一種GNSS增強(qiáng)系統(tǒng),通常可以顯著提高全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)的啟動(dòng)性能,即首次定位時(shí)間(TTFF)。利用普通的移動(dòng)通信網(wǎng)絡(luò),傳送增強(qiáng)校正數(shù)據(jù),加強(qiáng)或者加快衛(wèi)星導(dǎo)航信號(hào)的搜索跟蹤性能與速度,可以明顯縮短接收機(jī)的首次定位時(shí)間,同時(shí)可以在受到一定遮擋的情況下(或者半開闊區(qū)域),也能實(shí)現(xiàn)衛(wèi)星導(dǎo)航定位。
所提供的輔助信息,包括導(dǎo)航衛(wèi)星的歷書、星歷、頻率范圍、標(biāo)準(zhǔn)時(shí)間和近似位置等。通過提供輔助信息,使GNSS接收機(jī)在捕獲之前就知道應(yīng)該捕獲的頻率范圍,然后輔助數(shù)據(jù)再提供用來計(jì)算GNSS用戶位置的衛(wèi)星所在位置。一旦捕獲衛(wèi)星信號(hào)后,剩下的工作就是偽距的測量(僅僅需要幾毫秒,而不是幾分鐘),然后A-GNSS接收機(jī)開始計(jì)算用戶的位置。首次定位時(shí)間從1分鐘或者幾分鐘量級(jí)縮短到1秒量級(jí)。此外,由于A-GNSS接收機(jī)被設(shè)計(jì)為預(yù)先知道需要搜索哪個(gè)頻率,接收機(jī)的信號(hào)搜索跟蹤過程就變得較為簡單,有針對性地壓縮接收機(jī)搜索頻帶,降低噪聲帶寬,增加信號(hào)能量的累計(jì)時(shí)間,從而增加了A-GNSS接收機(jī)的靈敏度,并允許它捕獲更弱的信號(hào)。
-
PPP
+關(guān)注
關(guān)注
0文章
18瀏覽量
10458 -
GNSS
+關(guān)注
關(guān)注
9文章
726瀏覽量
47644 -
RTK
+關(guān)注
關(guān)注
8文章
118瀏覽量
37360
發(fā)布評論請先 登錄
相關(guān)推薦
GNSS 多星定位原理及校正方式對比
TAU1312 多系統(tǒng)多頻 RTK 定位模塊
TAU1308 多系統(tǒng) RTK 定位模塊
基于CORS系統(tǒng)的高精度RTK定位技術(shù)設(shè)計(jì)詳解
百度Apollo高精定位方案分析
PPP已成為RTK,瞬時(shí)實(shí)現(xiàn)厘米級(jí)GNSS全球定位
如何對RTK高精度定位算法進(jìn)行驗(yàn)證
自動(dòng)駕駛高精定位的PPP-RTK可行的系統(tǒng)架構(gòu)設(shè)計(jì)方案
自動(dòng)駕駛定位方式:RTK定位與激光融合定位

您了解RTK技術(shù)嗎?—— 揭秘GNSS中的定位技術(shù)

u-blox攜手合作伙伴共同開發(fā)新一代PointPerfect PPP-RTK增強(qiáng)型智能天線
RTK、PPP與RTK-PPP?一文帶您認(rèn)識(shí)高精定位及如何進(jìn)行高精定位GNSS測試!(一)
RTK、PPP與RTK-PPP?一文帶您認(rèn)識(shí)高精定位及如何進(jìn)行高精定位GNSS測試!(二)
北斗RTK高精度定位系統(tǒng)介紹
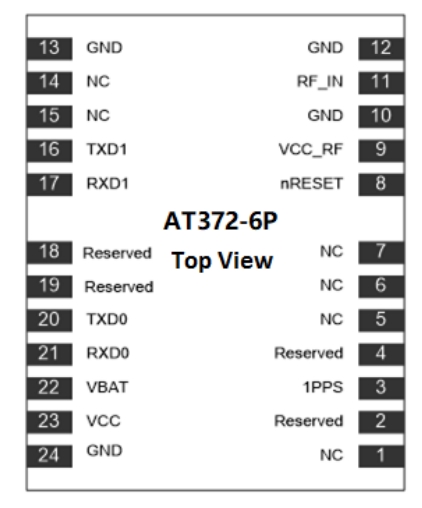
AT372-6P杭州中科微GNSS單頻RTK高精度定位模塊datasheet





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論