") 什么是激光雷達(dá)?LiDAR系統(tǒng)的工作原理及解決方案
什么是激光雷達(dá)?LiDAR系統(tǒng)的工作原理及解決方案
什么是激光雷達(dá)?
激光雷達(dá)(LiDAR)是光探測與測距(Light Detection and Ranging)技術(shù)的縮寫。在工作過程中,激光束從光源發(fā)射并被場景中的物體反射回探測器,通過測量光束飛行時間(Time of Flight,簡稱ToF),可以推算出場景內(nèi)物體的距離,并生成距離地圖。
目前,LiDAR已廣泛應(yīng)用于各個領(lǐng)域。在大氣科學(xué)中,LiDAR被用于空氣質(zhì)量監(jiān)測和污染物檢測;在天文學(xué)領(lǐng)域,LiDAR技術(shù)可用于觀察行星表面地貌特征以及太陽系內(nèi)其他天體的形態(tài)結(jié)構(gòu);在工程建設(shè)方面,利用LiDAR技術(shù)可以快速獲取地形數(shù)據(jù)、制作數(shù)字高程模型(DEM)以及生成精確的三維地圖;而在汽車領(lǐng)域中,人們普遍認(rèn)為LiDAR是一項關(guān)鍵的光學(xué)距離感知技術(shù),在自動駕駛領(lǐng)域得到了廣泛應(yīng)用。幾乎所有投入自動駕駛研發(fā)的廠商都將LiDAR視為一項關(guān)鍵技術(shù),并且已經(jīng)有一些低成本、小體積的LiDAR系統(tǒng)被應(yīng)用于高級駕駛輔助系統(tǒng)(Advanced Driver Assistance Systems, ADAS)。
LiDAR 系統(tǒng)的工作原理及解決方案
本質(zhì)上講,LiDAR 是一個測量目標(biāo)物體距離的裝置。通過發(fā)射一個短的激光脈沖,并記錄發(fā)射光脈沖與探測到的反射(反向散射)光脈沖的時間間隔,就可以推算出距離信息。
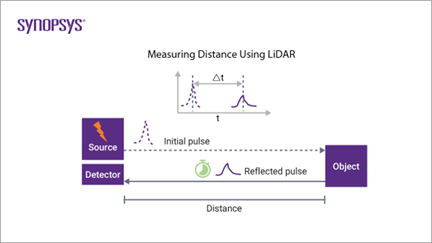
▲系統(tǒng)的工作原理及解決方案
LiDAR系統(tǒng)可以使用掃描反射鏡,多束激光或其它的方式“掃描”物體空間。借助其精確的測距能力,LiDAR 能夠用于解決許多不同的問題。
在遙感應(yīng)用中,LiDAR系統(tǒng)用于測量散射,吸收,或大氣中的顆粒或原子的再發(fā)射。在這些應(yīng)用中,對激光束的波長可能會有專門的要求。可以用來測量特定分子種類在大氣中的濃度,例如甲烷和氣溶膠含量。而測量大氣中的雨滴則可以用來估計風(fēng)暴距離和降水概率。
LiDAR還能夠用于確定測量目標(biāo)的速度。這可以通過多普勒方法或快速連續(xù)測距來實現(xiàn)。例如,可以使用LiDAR系統(tǒng)測量風(fēng)速和車速。
另外,LiDAR系統(tǒng)能夠用于建立動態(tài)場景的三維模型,這是自動駕駛中會遇到的情形。這可以通過多種方式來實現(xiàn),通常使用的是掃描的方式。
LiDAR 技術(shù)中的挑戰(zhàn)
在可實現(xiàn)的LiDAR系統(tǒng)中存在一些眾所周知的挑戰(zhàn)。這些挑戰(zhàn)根據(jù)LiDAR系統(tǒng)的類型有所不同。以下是一些示例:
隔離和抑制發(fā)射光束的信號——探測光束的輻射亮度通常遠(yuǎn)大于回波光束。必須注意確保探測光束不會被系統(tǒng)自身反射或散射回接收器,否則探測器將會因為飽和而無法探測外部目標(biāo)。
發(fā)射端與預(yù)定目標(biāo)之間的大氣雜質(zhì)會產(chǎn)生虛假回波——這些大氣雜質(zhì)產(chǎn)生的虛假回波可能會非常強(qiáng)烈,以至于無法可靠的檢測到來自預(yù)定目標(biāo)物的回波信號。
可用光功率限制——更高功率的光束可以提供更高的精度,但也更加昂貴。
掃描速度——激光光源的工作頻率可能對人眼造成危害并引發(fā)安全問題,然而我們可以通過其他方法來緩解這個問題。例如,固態(tài)LiDAR能夠在不威脅人眼安全的波長下運(yùn)行,并且還能照亮更廣闊的區(qū)域。
來自附近其他LiDAR裝置的信號串?dāng)_可能會干擾目標(biāo)信號。當(dāng)前所面臨的挑戰(zhàn)在于如何區(qū)分來自周邊其他LiDAR設(shè)備的信號,而各種信號調(diào)制和隔離方法也正在積極研發(fā)中。
LiDAR系統(tǒng)的成本和維護(hù)——這類系統(tǒng)相比一些替代技術(shù)所使用的傳感器類型更加昂貴,當(dāng)然持續(xù)不斷的開發(fā)工作也在積極進(jìn)行,為滿足其大規(guī)模使用的需要而開發(fā)生產(chǎn)成本更低的系統(tǒng)。抑制非目標(biāo)對象的回波——類似于抑制之前提到的大氣虛假信號。但是這也可能會出現(xiàn)在空氣質(zhì)量良好的情況下。應(yīng)對這一挑戰(zhàn)通常涉及在不同的目標(biāo)距離處,以及在LiDAR接收器的視場范圍之內(nèi)使光束尺寸盡可能更小。
LiDAR 技術(shù)的其它應(yīng)用
LiDAR 的應(yīng)用范圍廣泛而多樣。在大氣科學(xué)中,LiDAR已被用于檢測多種大氣成分。已經(jīng)應(yīng)用于表征大氣中的氣溶膠,研究高層大氣風(fēng),剖面云,幫助收集天氣數(shù)據(jù),以及其它許多應(yīng)用場合。在天文學(xué)中,LiDAR已被用于測量距離,包括遠(yuǎn)距離物體(例如月球)和近距離物體。實際上,LiDAR是將地月距離測量的精度提高到毫米級的關(guān)鍵設(shè)備。LiDAR還在天文學(xué)應(yīng)用中用于建立導(dǎo)星。
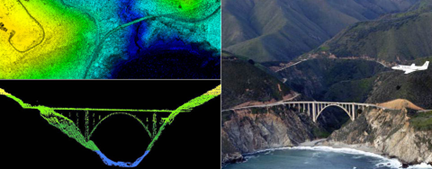
▲ 大橋的俯視圖(左上)和側(cè)視圖(左下)
LiDAR 數(shù)據(jù)通常在空中收集,如NOAA在加州大蘇爾Bixby大橋上空的調(diào)查飛機(jī)(右圖)。這里的LiDAR數(shù)據(jù)顯示了Bixby大橋的俯視圖(左上)和側(cè)視圖(左下)。NOAA的科學(xué)家使用基于LiDAR的裝置檢查自然和人造環(huán)境。LiDAR數(shù)據(jù)支持洪水和風(fēng)暴潮建模、水動力建模、海岸線測繪、應(yīng)急響應(yīng)、水文測量以及海岸脆弱性分析等活動。
此外,地形LiDAR使用近紅外激光繪制地形和建筑物地圖,而測深LiDAR使用透水綠光繪制海底和河床地圖。在農(nóng)業(yè)中,LiDAR可用于繪制拓?fù)鋱D和作物生長圖,從而提供有關(guān)肥料需求和灌溉需求的信息。在考古學(xué)中,LiDAR已被用于繪制茂密森林樹冠下的古代交通系統(tǒng)地圖。
如今,LiDAR經(jīng)常用于創(chuàng)建所處空間的三維模型。自主導(dǎo)航是使用LiDAR系統(tǒng)生成的點云數(shù)據(jù)的應(yīng)用之一。微型LiDAR系統(tǒng)甚至能夠嵌入在手機(jī)大小的設(shè)備中。
LiDAR 在現(xiàn)實世界中如何發(fā)揮作用
自主導(dǎo)航中的態(tài)勢感知是LiDAR的一個最引人入勝的應(yīng)用。任何移動車輛的態(tài)勢感知系統(tǒng)都需要同樣了解其周圍的靜止和移動物體。例如,雷達(dá)技術(shù)長期以來用于探測飛機(jī)。對于地面車輛,已經(jīng)發(fā)現(xiàn)LiDAR非常有用,因為它能夠確定物體的距離并且在方向性上非常精確。探測光束能夠在角度上精確定向并快速掃描,據(jù)此創(chuàng)建三維模型點云數(shù)據(jù)。因為車輛周圍的情況是高度動態(tài)的,所以快速掃描能力對這類應(yīng)用至關(guān)重要。
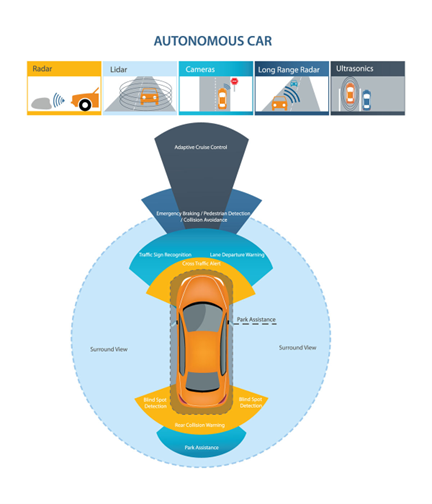
▲自動駕駛汽車中的汽車傳感器使用攝像頭數(shù)據(jù)、雷達(dá)和LiDAR來檢測周圍的物體
▲ 自動駕駛汽車使用LiDAR傳感器探測周圍建筑和車輛
開發(fā)LiDAR 系統(tǒng)所需要的軟件工具
軟件在LiDAR系統(tǒng)的創(chuàng)建和運(yùn)行中的各個環(huán)節(jié)都非常關(guān)鍵。系統(tǒng)工程師需要輻射模型來預(yù)測回波信號的信噪比。電子工程師需要電子模型來建立電氣設(shè)計。機(jī)械工程師需要CAD工具來完成系統(tǒng)布局。還可能會需要結(jié)構(gòu)和熱建模軟件。LiDAR系統(tǒng)的運(yùn)行需要控制軟件和將點云轉(zhuǎn)換并重建為三維模型的軟件。而LiDAR是利用光作為探測媒介來感知周圍的系統(tǒng),因此光學(xué)工程師運(yùn)用光學(xué)軟件設(shè)計可靠穩(wěn)定的光學(xué)系統(tǒng)是關(guān)鍵。
新思科技提供的多個光學(xué)和光子學(xué)工具,可用于支持LiDAR的系統(tǒng)級和元件級設(shè)計:
CODE V 光學(xué)設(shè)計軟件,用于在LiDAR系統(tǒng)中設(shè)計光學(xué)接收系統(tǒng)。
光學(xué)設(shè)計應(yīng)用:在 LiDAR系統(tǒng)中優(yōu)化接收器上的圈入能量。
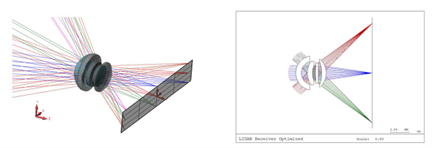
▲ 使用CODE V優(yōu)化LiDAR中的接收光學(xué)系統(tǒng)
LightTools 照明設(shè)計軟件能模擬雨滴、霧霾等大氣環(huán)境對光信號探測造成的影響,并能獲取返回光程數(shù)據(jù)以解決飛行時間計算問題。
用于 LiDAR 和激光光源的功能。
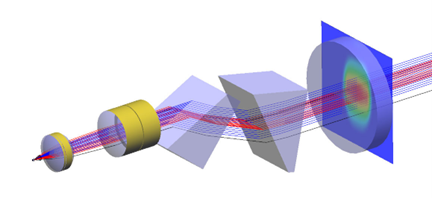
▲ 使用LightTools模擬LiDAR光學(xué)系統(tǒng)
Photonic Solutions光子方案模擬工具,能夠?qū)iDAR系統(tǒng)中的多個組件進(jìn)行優(yōu)化設(shè)計。
RSoft 工具,能夠支持對片上LiDAR器件進(jìn)行復(fù)雜的布局設(shè)計。任何單一仿真工具都無法勝任如此復(fù)雜性質(zhì)的設(shè)計問題。組合使用RSoft工具,如FullWAVE FDTD用于發(fā)射器,Multiphysics Utility用于T-O Phaser,BeamPROP BPM用于分束器,將會達(dá)成最佳布局設(shè)計。
OptSim,用于設(shè)計和模擬光通信系統(tǒng)。
光學(xué)相干斷層掃描(OCT)和光探測和測距(LiDAR)應(yīng)用中接收到的射頻頻譜,得到飛行時間(ToF)的分辨率及測量結(jié)果。
光子集成電路的應(yīng)用領(lǐng)域也在持續(xù)擴(kuò)展,從數(shù)據(jù)中心中的收發(fā)器和開關(guān)到更多樣化的汽車,生物醫(yī)學(xué)和傳感器市場,如(固態(tài))LiDAR,層析成像和自由空間傳感器。
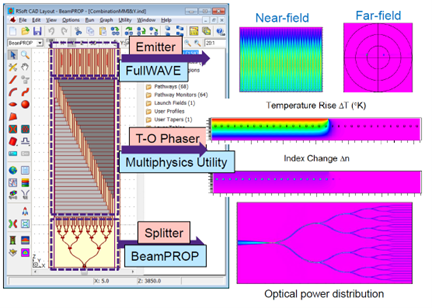
▲ 在片上LiDAR的設(shè)計中對不同元件組合使用RSoft工具
總結(jié)
總之,隨著科技不斷進(jìn)步與發(fā)展,LiDAR已經(jīng)成為多個領(lǐng)域不可或缺且無法替代的關(guān)鍵工具之一。其廣泛應(yīng)用將進(jìn)一步推動各行各業(yè)向著更加智能化、高效率和精準(zhǔn)度發(fā)展,并為人類社會帶來更多福祉與便利。
審核編輯:湯梓紅
-
接收器
+關(guān)注
關(guān)注
14文章
2458瀏覽量
71806 -
新思科技
+關(guān)注
關(guān)注
5文章
789瀏覽量
50311 -
光學(xué)系統(tǒng)
+關(guān)注
關(guān)注
4文章
240瀏覽量
18289 -
激光雷達(dá)
+關(guān)注
關(guān)注
967文章
3943瀏覽量
189625 -
LIDAR
+關(guān)注
關(guān)注
10文章
323瀏覽量
29364
原文標(biāo)題:以“光”為媒感知世界,探尋激光雷達(dá)的光學(xué)奧秘
文章出處:【微信號:Synopsys_CN,微信公眾號:新思科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
成熟的無人駕駛方案離不開激光雷達(dá)
消費(fèi)級激光雷達(dá)的起航
即插即用的自動駕駛LiDAR感知算法盒子 RS-Box
激光雷達(dá)和相機(jī)之間的外參標(biāo)定
最佳防護(hù)——激光雷達(dá)與安防監(jiān)控解決方案
由iphone12說說激光雷達(dá) FMCW激光雷達(dá) 精選資料分享
全球光學(xué)巨頭提供FMCW激光雷達(dá)解決方案
激光雷達(dá)LIDAR的工作原理及特點應(yīng)用分析
汽車激光雷達(dá)是什么 工作原理是什么
激光雷達(dá)工作原理

宏展LiDAR激光雷達(dá)TCT溫循試驗方案

簡述激光雷達(dá)的結(jié)構(gòu)原理分類及特點 TIM320激光雷達(dá)的工作原理
激光雷達(dá)LIDAR基本工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論