 RZ/T2M RZ/N2L RZ/T2L系列應用心得
RZ/T2M RZ/N2L RZ/T2L系列應用心得
二RZ/T2M-RSK EVK運行ECAT
1需要提前安裝的開發環境和代碼包
目前推薦IAR9.30.1,代碼例程在官方地址:
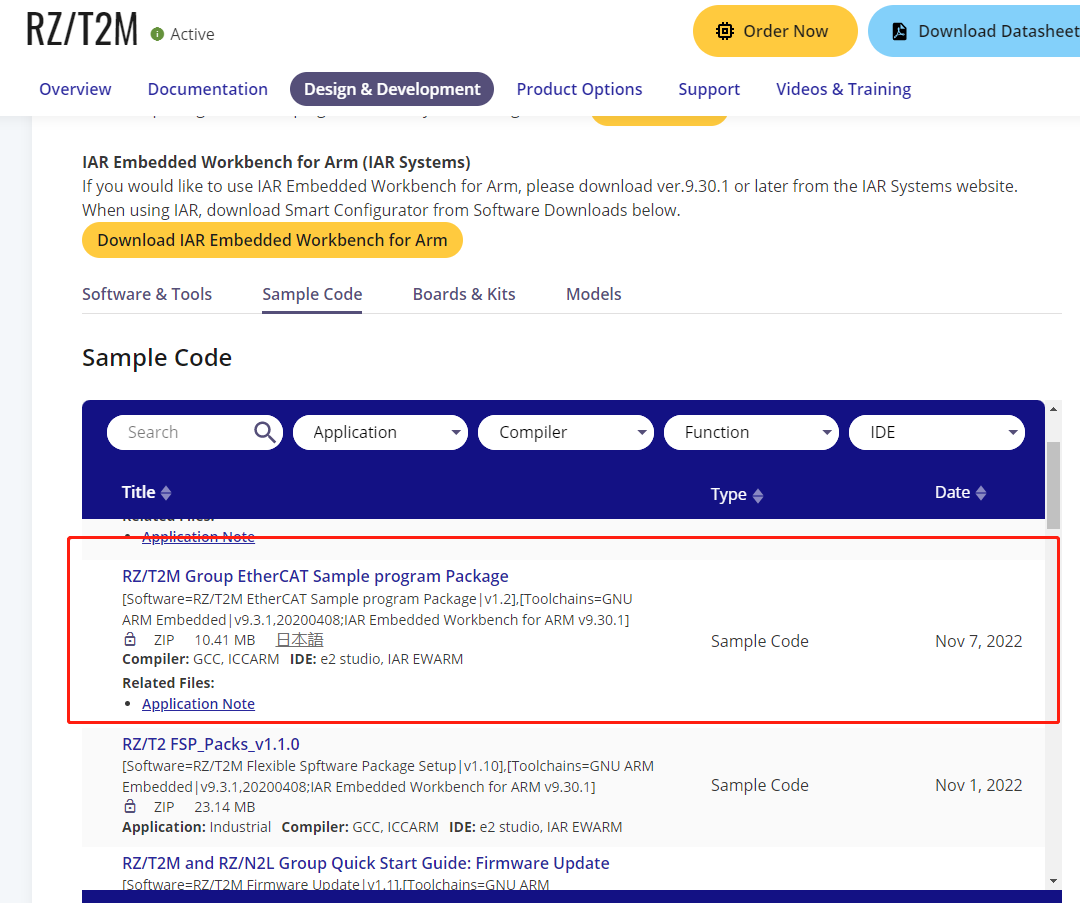
已經測試,CiA402,ecat_IO都可以編譯并正常運行。

2調試過程中,常見問題匯總:
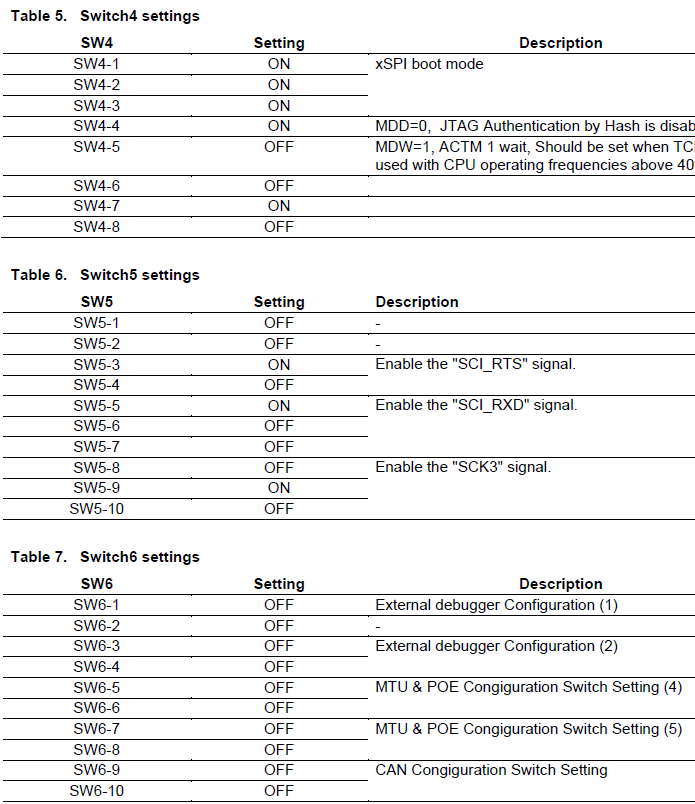
A) 使用WS2.1的 EVK,必須要按照文檔,把板子上的SW4,5,6都撥好。
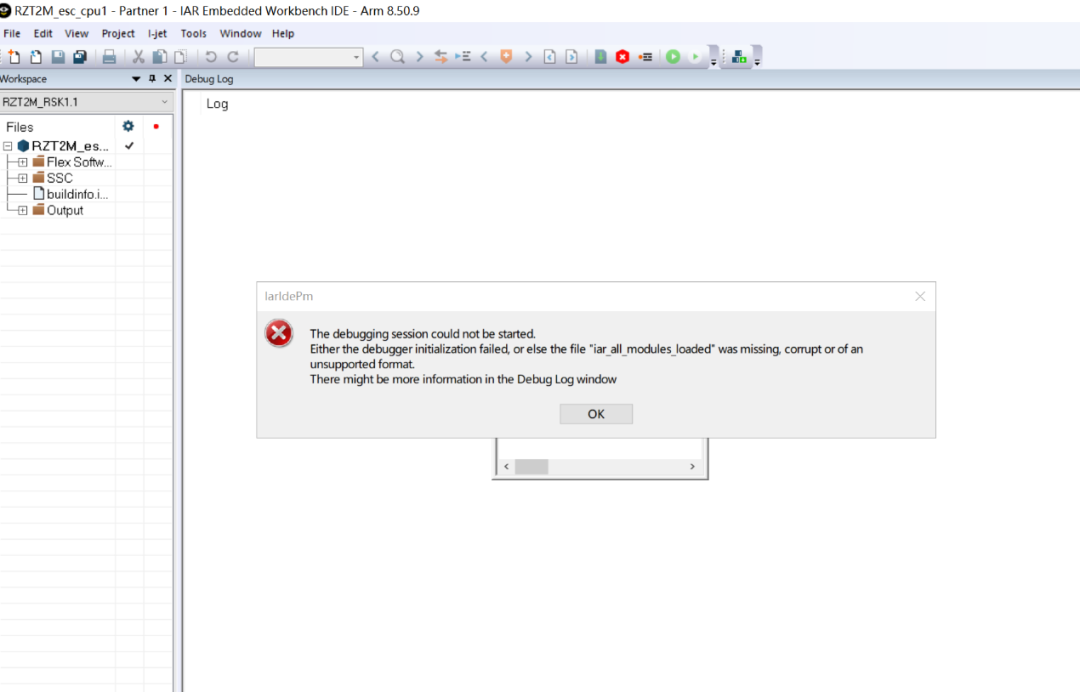
B) 需要注意使用IAR9.3.1,如果是IAR8.5,在debug過程中,會出現如下問題。

三RZ/N2L-RSK運行ECAT
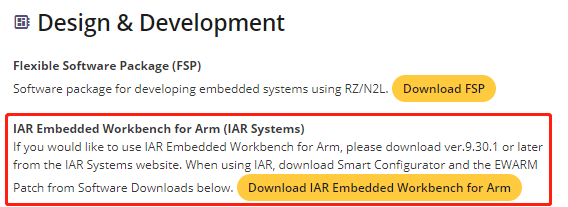
1需要提前安裝的開發環境和代碼包
A)開發環境:
E2 studio (直接內嵌Smart config with FSP1.0)
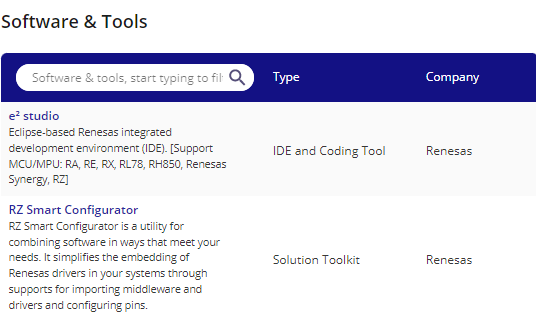
IAR + Smart config with FSP1.0
目前IAR的版本是IAR9.3
Smart config with FSP1.0
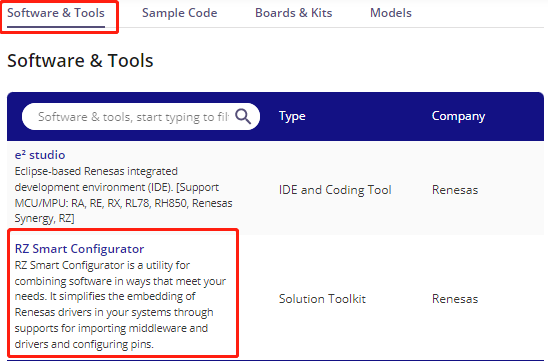
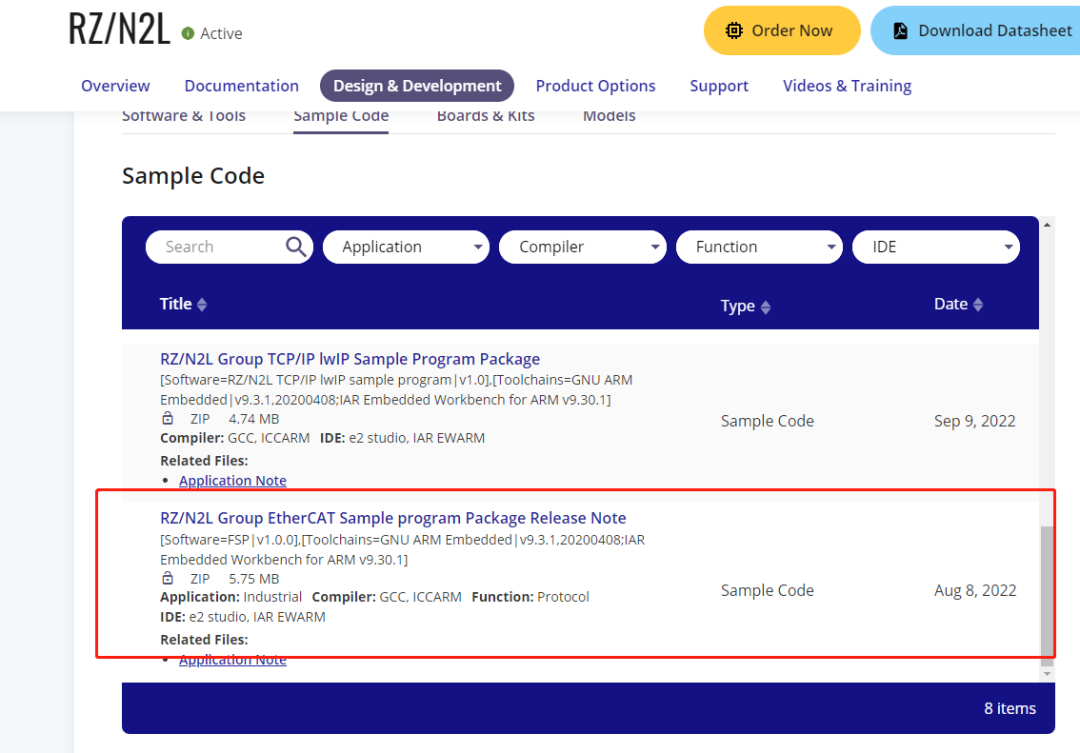
B) 例程代碼包,請在以下鏈接地址下載
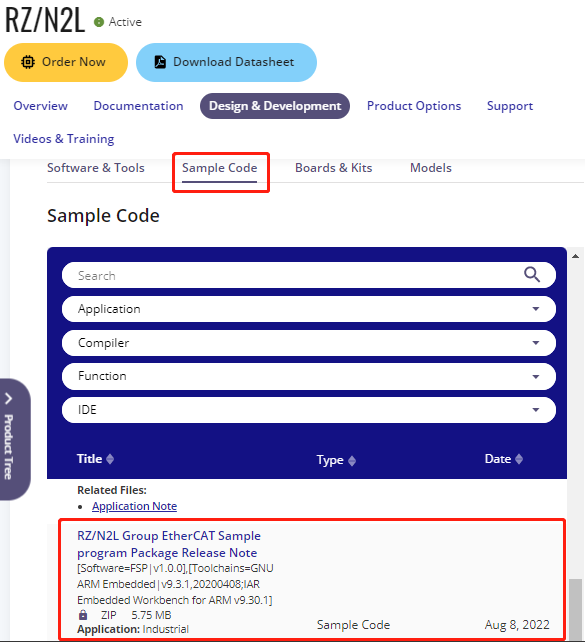
C) 環境準備完畢后,無論是E2 studio還是IAR+smart confi環境,都請仔細查看如下文件包里面里面包含的pdf。
2常見問題匯總
A) IAR環境下,不知道如何在IAR下打開smart config/FSP1.0插件。
請參考后文十一章節-1,2,3小節。
B) 目標編譯目錄如下
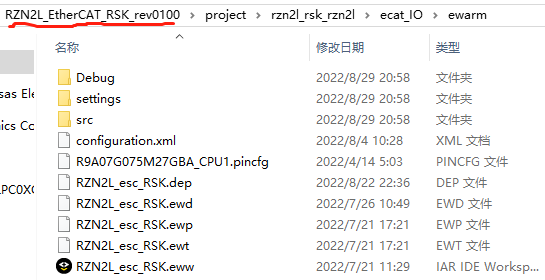
*目錄不能太深
*不能有中文路徑
四RZ/T2M Local EVK & N2L Local EVK(CN032)運行ECAT
1資料下載方法
A) RZ/T2M和RZ/N2L的local EVK的全部配套資料,已經在官網上正式釋放。
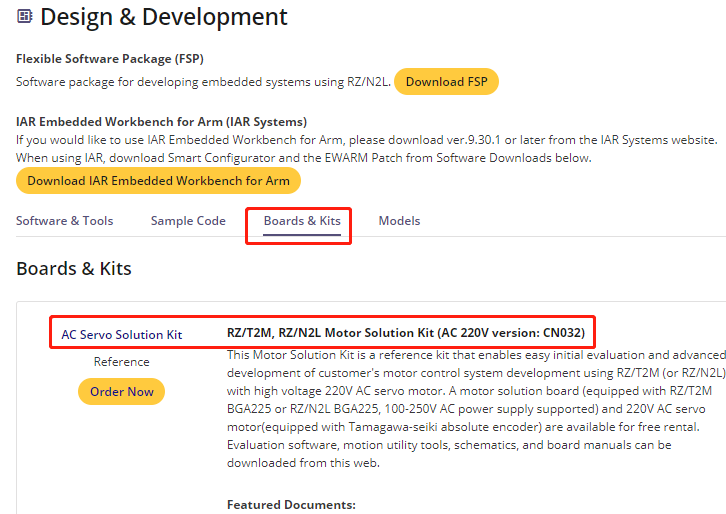
注意:由于225P封裝的RZ/T2M和RZ/N2L是pin to pin的,所以很多local EVK的資料(原理圖,pcb layout,PC側上位機通訊軟件)是直接相互共用的。
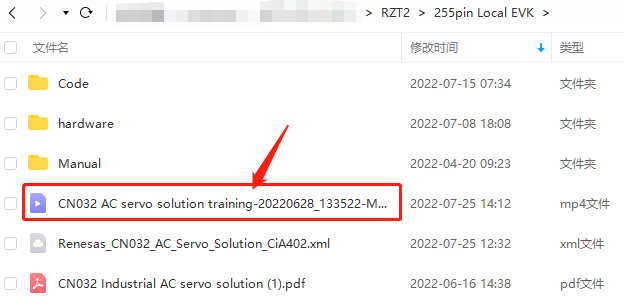
C) 網盤資料參考第一章重點看這個教學視頻,請仔細看。Local EVK的大部分已知問題,都在這個視頻里面有講解。
2硬件連接
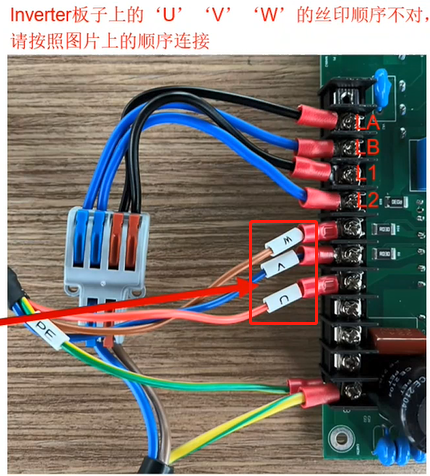
i. 注意
UVW三相是電機的三相,和RZT2M local evk的板子上的絲印沒有必然關系!
請以下圖中的情況接線。
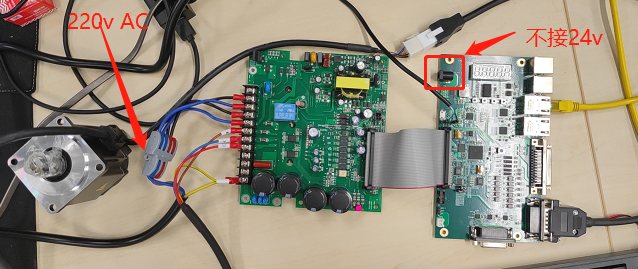
ii. 系統供電
● 如果不帶逆變板和電機,CPU板,24v供電。
【非常重要】此場景,可debug單步執行。常見于調試周邊驅動,PWM波形輸出,ECAT網絡狀態等。

●如果帶逆變板和電機,請務必只連接220v供電。
【非常重要】此場景,不要debug單獨執行,容易燒逆變器和電機。常見于最后的整體性能調教。
iii.整個系統,帶上逆變板和電機后,所有程序均不建議單步執行
iv.整個系統,不帶逆變板和電機,才可以單步執行
v.10pin的JTAG口調試線,請單獨購買(即可支持J-Link,也可以I-JET)
3軟件環境說明
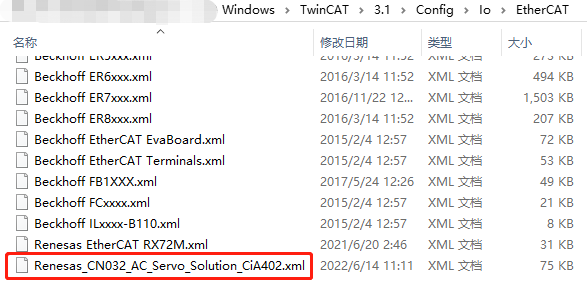
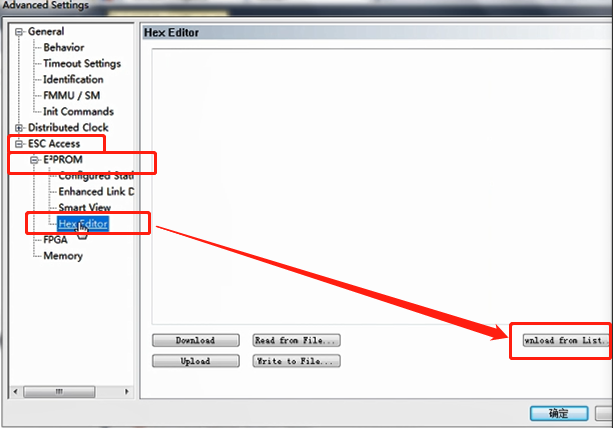
請把XML目錄放在PC端的TwinCAT的這個目錄下。
A) 首次拿到新板(ECAT專用EERPOM內部沒有“xml”設備描述文件),首先在WINCAT環境下,scan設備,在ecat下找到一個新設備,并進行ECAT下的首次設備描述文件的EEPROM下裝。(教學視頻里面有講解)
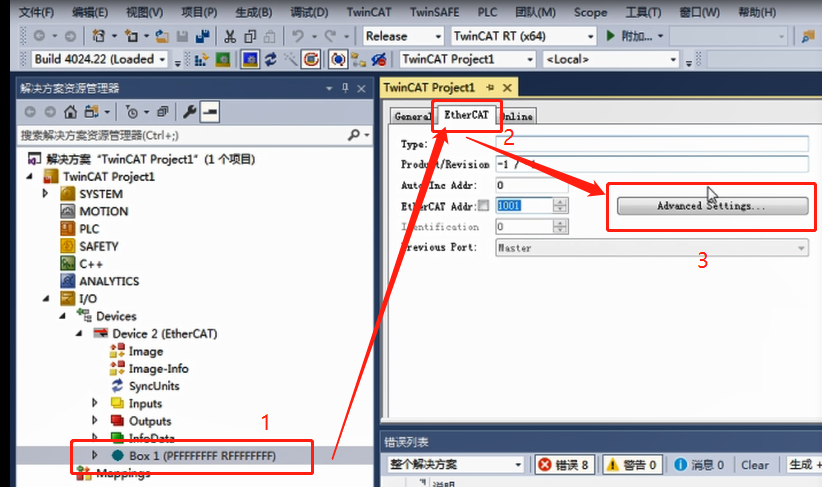
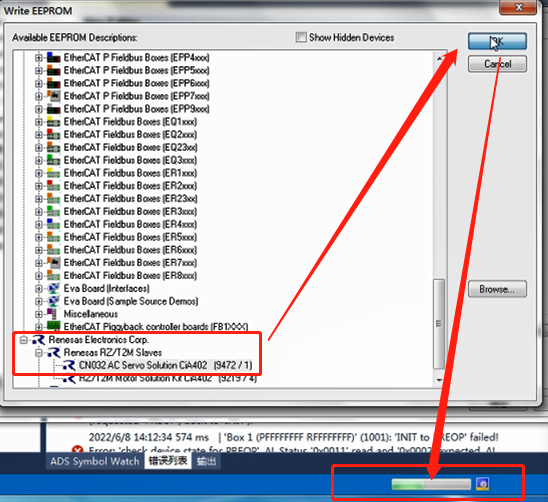
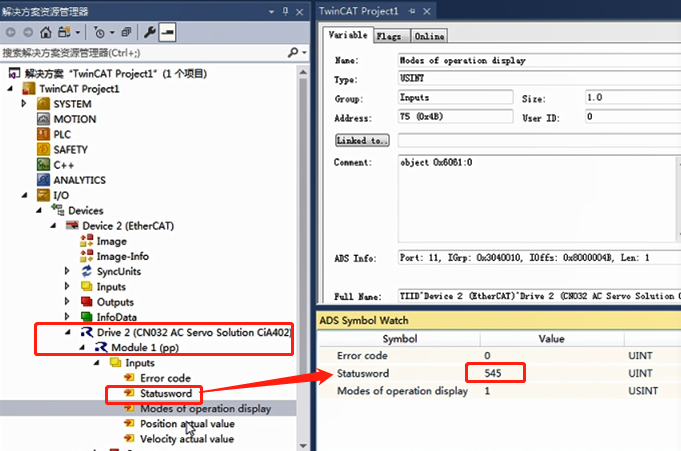
B) 更新完畢后,按照視頻說明,重新update設備(或者刪除設備,并重新scan)。會發現一個ECAT型CN設備。并把input菜單下的 “status word”變量,右鍵加入live watch window中。
●第一次連接,會提示是NC還是CNC設備。選擇NC即可。
●如果狀態為545,即為正常通訊狀態,可以進行下一步測試。
●如果狀態不是545,則不是正常通訊狀態,請全面檢查整個硬件連接。
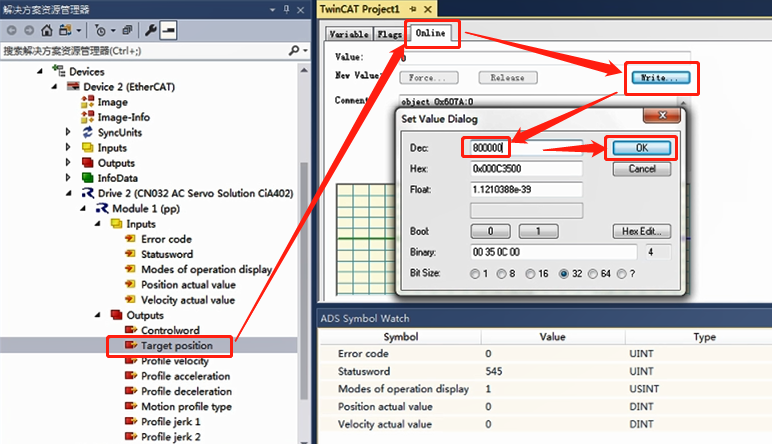
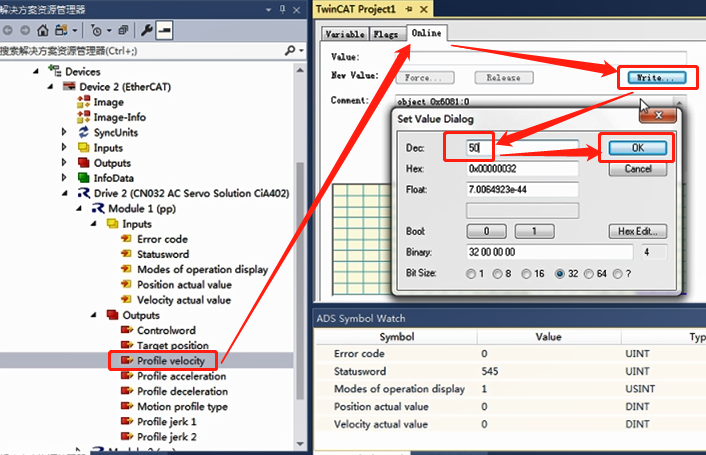
C) 開始進行ECAT網絡通訊下的EVK實時控制。首先設置目標轉動位置。
一般8,000,000~80,000,000都可以。
D) 然后設置target velocity為50
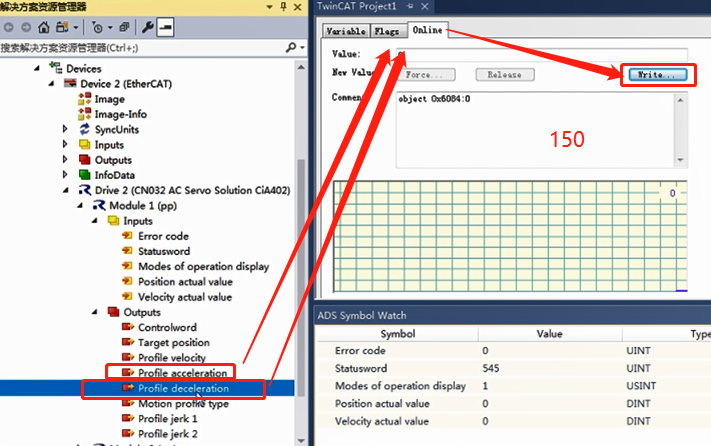
E) 再設置profile accelerate和profile decelerate 都為150。
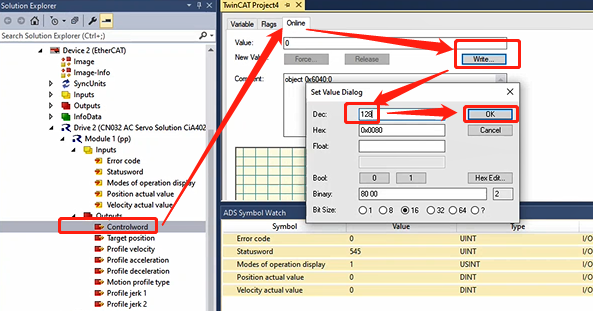
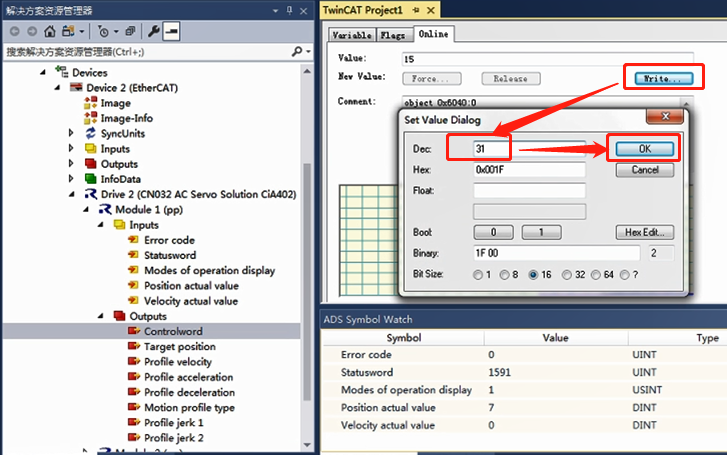
F) 最后設置control broad菜單里面的內容。
第一步
設置為128. (設置為初始狀態)
并通過ECAT網絡寫入T2M伺服控制EVK。
第二步
不要切換界面,再次寫入。設置為15(系統開啟強電控制部分)
并通過ECAT網絡寫入T2M伺服控制EVK。
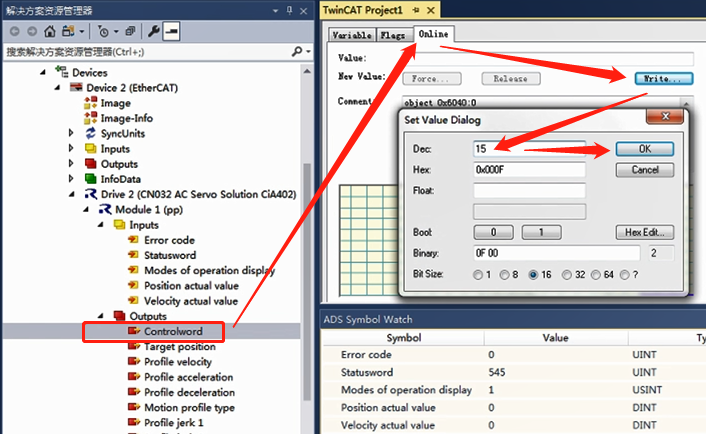
第三步
不要切換界面,再次寫入。設置為31(開始啟動電機轉動)
4IAR環境下,燒錄自己的調試程序到Local EVK上
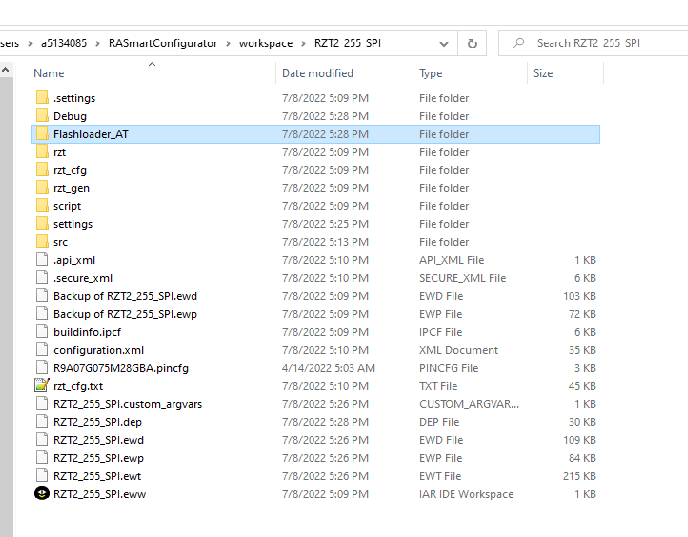
A) 首先打這個補丁到官方提供的參考代碼目錄。增加flash loader文件。
B) 復制Flashloader_AT文件夾,到目標工程目錄
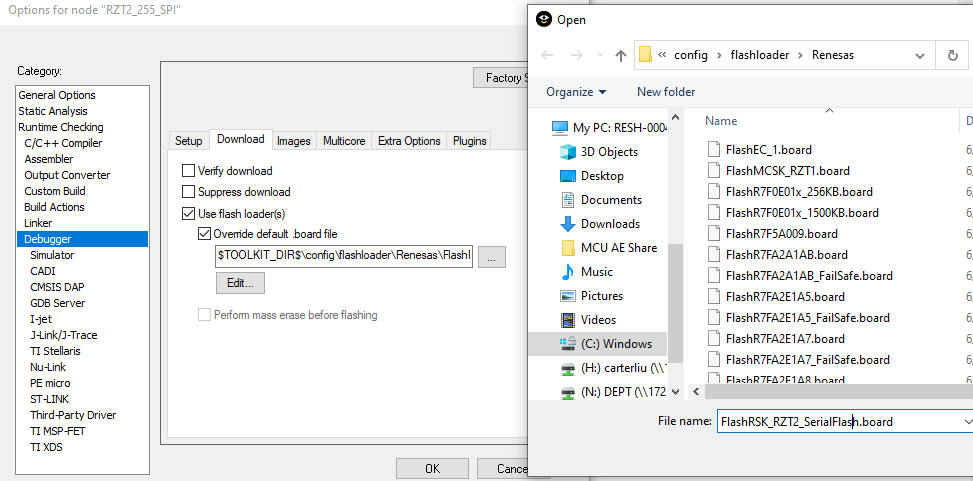
C) 把文件夾中的.board文件,放入如下flash loader目錄,
D) 并在IAR環境下,選中該文件,即可把可執行文件燒錄板載到QSPI-flash中
五
EtherCAT網絡協議棧常用工具,以及打補丁的方法
1由于倍福是免費授權,不是開源。所以需要客戶自己到倍福的網站,注冊正式會員,然后下載對應的SSC tools。
2為了方便調試,可以在電腦上安裝最新的TwinCAT工具,目前最新的是3.1。

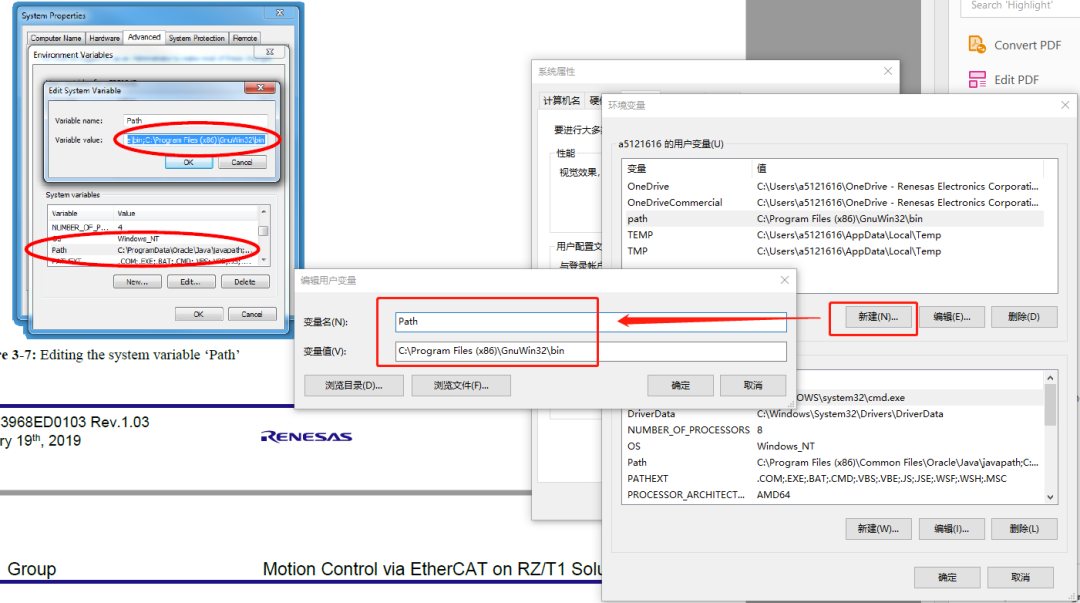
3運行patch補丁,如果出現運行中提示不能運行patch的時候,需要創建環境變量
審核編輯:湯梓紅
-
瑞薩
+關注
關注
35文章
22294瀏覽量
86098 -
代碼
+關注
關注
30文章
4753瀏覽量
68368 -
開發環境
+關注
關注
1文章
222瀏覽量
16586 -
編譯
+關注
關注
0文章
654瀏覽量
32813
原文標題:RZ/T2M RZ/N2L RZ/T2L系列應用心得(5)
文章出處:【微信號:瑞薩MCU小百科,微信公眾號:瑞薩MCU小百科】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

RZ/T2M RZ/N2L RZ/T2L系列應用心得(上)

RZ/T2M RZ/N2L RZ/T2L系列應用心得(下)

瑞薩教你如何使用RZ/T2L RZ/N2L RSK J-Link OB
RZ/T2M 組 RZ/T2M Motor Solution Kit Startup 手冊(for RZ/T2M Motion Control Utility)

RZ/T2M 組 RZ/T2M Motor Solution Board 硬件手冊
RZ/T2M 組 RZ/T2M Motor Solution Kit Startup 手冊(for RZ/T2M Motion Control Utility)
RZ/T2M 組 RZ/T2M Motor Solution Board 硬件手冊
RZ/T2M、RZ/N2L和RZ/T2L產品簡介

RZ/T2M, RZ/T2L, RZ/N2L電機解決方案套件數據手冊






 工商網監
工商網監
評論