 EPSON愛普生助力智能泳池清潔機器人導航方案應用
EPSON愛普生助力智能泳池清潔機器人導航方案應用
目前泳池清潔機器人成為一個新的熱點賽道,許多公司都在此新領域投入研發,其中主要為曾經從事家用掃地機的相關公司,因為泳池清潔機器人的智能化與曾經的掃地機器人智能化路徑接近,而且目前還處于技術起步階段。
與家用掃地機器人相同的部分是目前泳池清潔機器人主要還是隨機式行走,沒有加入路徑規劃部分,清潔效率較低,未來將很快步入規劃式時代。不同的部分是泳池內的環境與家用掃地機工作環境完全不同,導航方式無法采用目前主流的激光導航或者視覺導航方式,未來可能主要以慣性導航+超聲波為主要的導航方式。目前超聲波雷達主要應用為避障等功能,所以主要能應用于泳池清潔機器人導航的最可靠的方式還是慣性導航。
首先分析一下泳池機器人的工作環境,泳池機器人的工作主要在泳池底部和墻部的清潔,墻部的清潔由于一般的加速度傳感器能夠非常清晰的提供俯仰角的數據,而且功能接近過去的擦窗機器人,所以墻部的清潔沒有太多的技術難點。而由于泳池機器人是需要上墻的,因此在結構上泳池機器人無法跟家用掃地機一樣設置前碰撞開關,所以檢測墻體目前一般根據泳池機器人爬上墻壁后造成的俯仰角變化來判斷,由此而造成機器人每次碰到墻都會有俯仰角變化。
頻繁的俯仰角變化又會對偏航角的精度造成較大的干擾,因此泳池機器人不僅僅需要Z軸陀螺儀的精度高,對X軸和Y軸也有同樣的要求。關于工作時間,一般家用泳池在20平到50平左右,雖然面積比較小,但是泳池機器人的移動速度也較低,一般為10CM/SEC,大約是家用掃地機器人的三分之一,清潔30平米的泳池底部大概需要的時間為1個小時,所以慣性導航對陀螺儀的精度要求也較高。
愛普生高精度陀螺儀
如果用超聲波傳感器解決機器人非必要上墻的問題,那么只需要在Z軸使用高精度陀螺儀就能達到這個要求,技術方案推薦為慣性導航掃地機器人過去常使用的1+6方案,即1顆愛普生高精度陀螺儀+1顆6軸陀螺儀傳感器。如果機器人需要頻繁上墻,那么此方案便不太適合,需要用較高端的IMU來導航。考慮到消費電子的成本要求,愛普生聯合第三方合作開發了SGPM01系列陀螺儀模塊,在此類工作環境中實測中能達到1小時5度偏差*,能夠滿足行業的普遍要求。
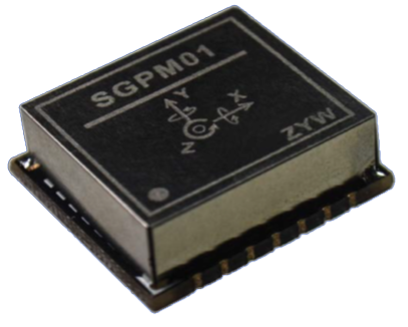
9軸陀螺儀模組
關于SGPM01系列陀螺儀模塊
1
產品描述 :
SGPM01是基于高性能陀螺儀傳感器和加速度計、磁力計開發的模組,內置3軸陀螺儀和3軸加速度計傳感器和3軸地磁傳感器。
依賴于高精度的傳感器、高性能的處理器和高級的數字信號處理算法,輸出非常穩定的角速度值、加速度值、磁力計和姿態角。模塊可以支持UART,SPI數據通訊,產品總體尺寸:24*22*8mm
2
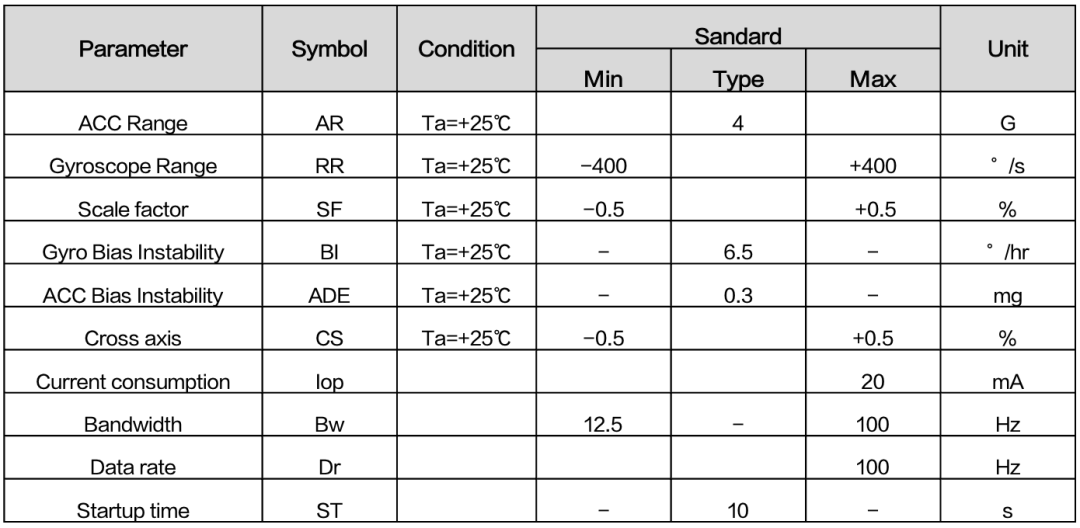
產品特性
▋高精度9軸陀螺儀模組
▋輸出三軸加速度值,三軸角速度值,三軸地磁,姿態角(Pitch,Roll,Yaw),溫度
▋數字通訊接口UART和SPI
▋產品尺寸:24*22*8mm
▋低功耗
3
*產品數據源自第三方實驗室,因使用和設置的不同,與實際數據可能存在差異。
-
EPSON
+關注
關注
1文章
122瀏覽量
85570 -
導航
+關注
關注
7文章
523瀏覽量
42382 -
清潔機器人
+關注
關注
2文章
52瀏覽量
6021
發布評論請先 登錄
相關推薦
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
水下測距傳感器:泳池清潔機器人精準定位的必備智能感知“神器”


其利天下技術·搭載無刷電機的掃地機器人的前景如何?
奧比中光攜手新加坡LionsBot,讓智能清潔機器人落地超過30個國家
EPSON助力智能泳池清潔機器人導航

愛普生陀螺儀模塊助力智能泳池清潔機器人導航方案

智能清潔:泳池機器人的無線充電技術變革
安全效率并存:泳池清潔機器人的無線充電進化
愛普生電子助力智能泳池清潔機器人導航方案






 工商網監
工商網監
評論