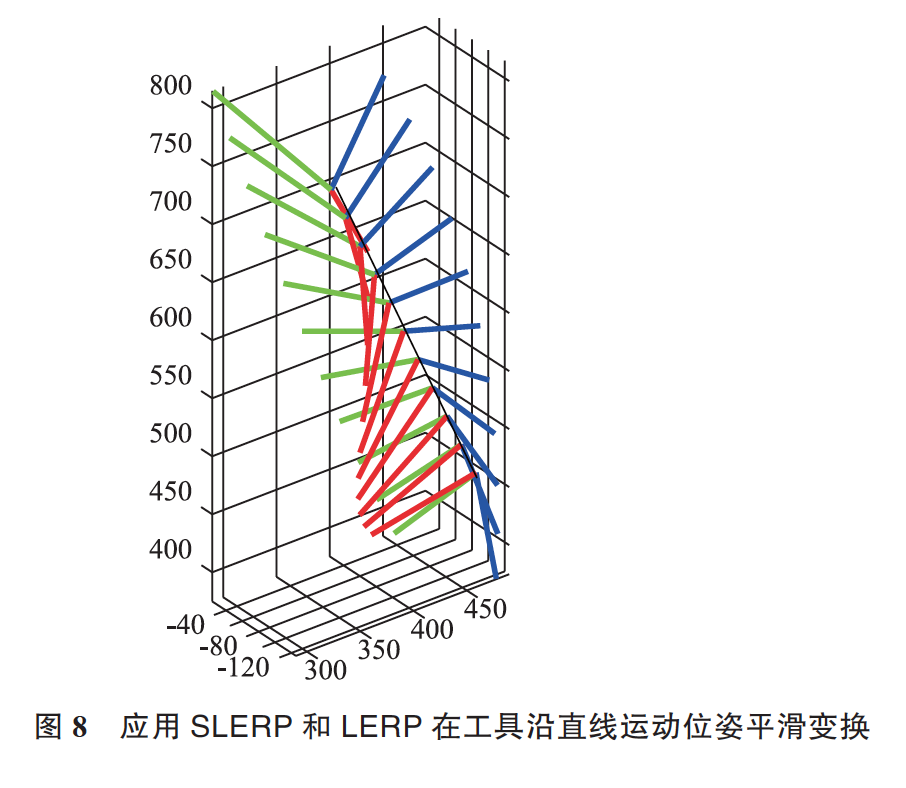
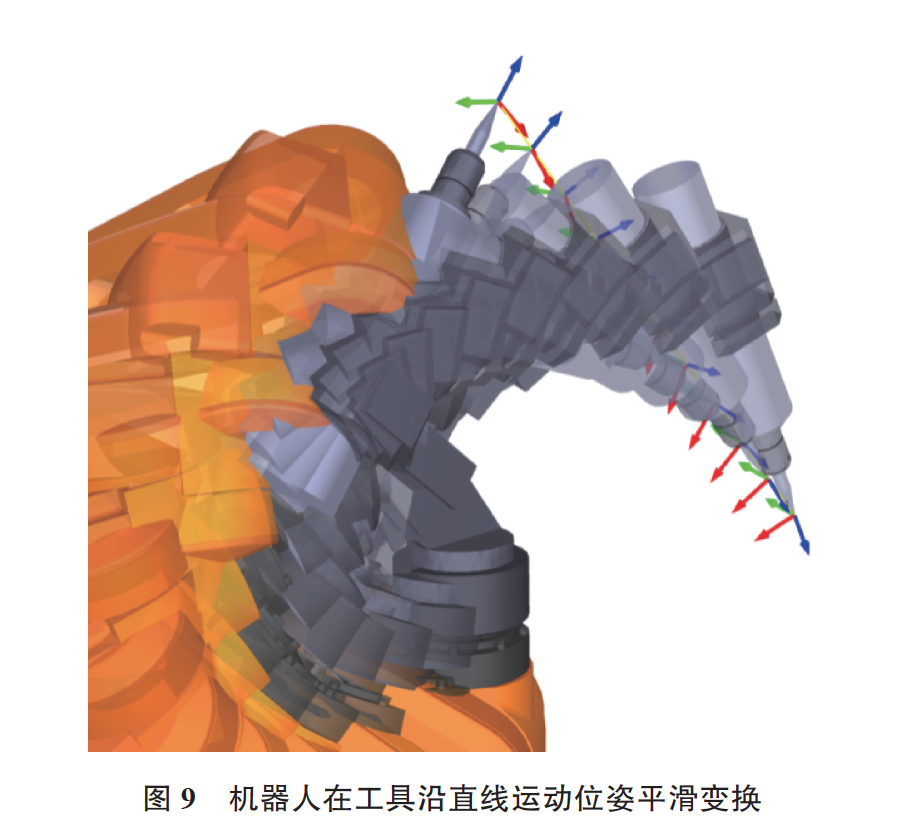
姿態(tài)規(guī)劃在機(jī)械臂控制中占有重要的地位,在編程操作時(shí)需要應(yīng)用姿態(tài)變換平滑性的插值算法確保機(jī)械臂工具動(dòng)作的柔和度。首先分析四元數(shù)法用作姿態(tài)描述和變換的數(shù)學(xué)基礎(chǔ),然后應(yīng)用四元數(shù)姿態(tài)插補(bǔ)算法SLERP 編程計(jì)算工具姿態(tài)變換的旋轉(zhuǎn)角度,用于準(zhǔn)確地檢測(cè)工具角位移的精確度和重復(fù)精度,最后引入實(shí)例編程說明如何應(yīng)用四元數(shù)姿態(tài)插補(bǔ)算法SLERP 和LERP 實(shí)現(xiàn)機(jī)器人工具姿態(tài)的平滑變換。
01
姿態(tài)規(guī)劃在機(jī)械臂控制中占有重要的地位,在編程操作時(shí)需要應(yīng)用姿態(tài)變換平滑性的插值算法確保機(jī)械臂工具動(dòng)作的柔和度。首先分析四元數(shù)法用作姿態(tài)描述和變換的數(shù)學(xué)基礎(chǔ),然后應(yīng)用四元數(shù)姿態(tài)插補(bǔ)算法SLERP 編程計(jì)算工具姿態(tài)變換的旋轉(zhuǎn)角度,用于準(zhǔn)確地檢測(cè)工具角位移的精確度和重復(fù)精度,最后引入實(shí)例編程說明如何應(yīng)用四元數(shù)姿態(tài)插補(bǔ)算法SLERP 和LERP 實(shí)現(xiàn)機(jī)器人工具姿態(tài)的平滑變換。
02
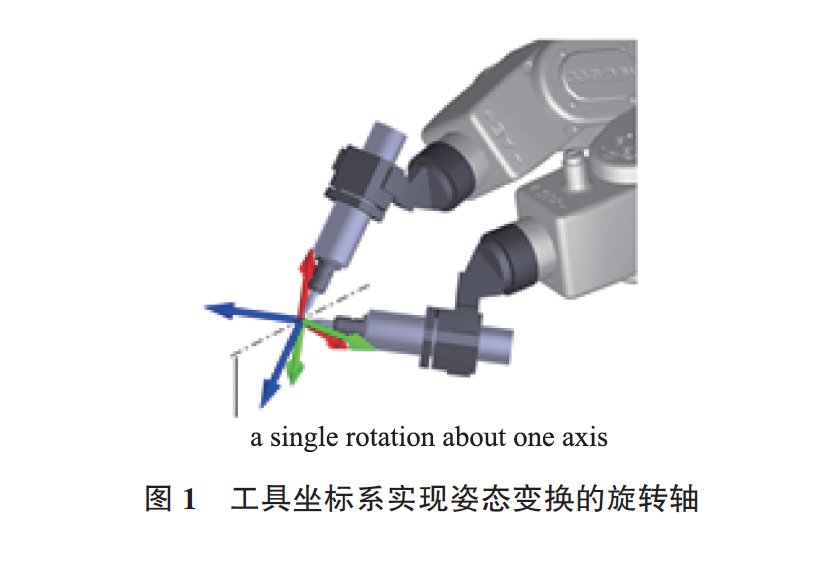
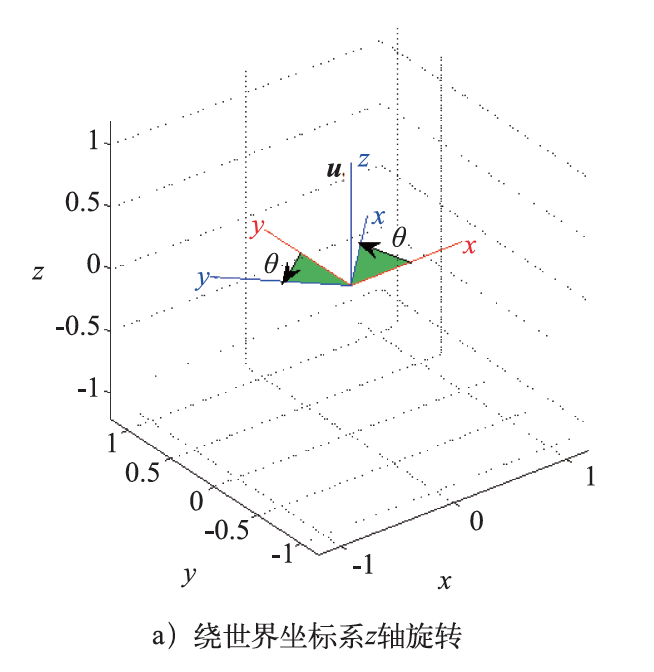
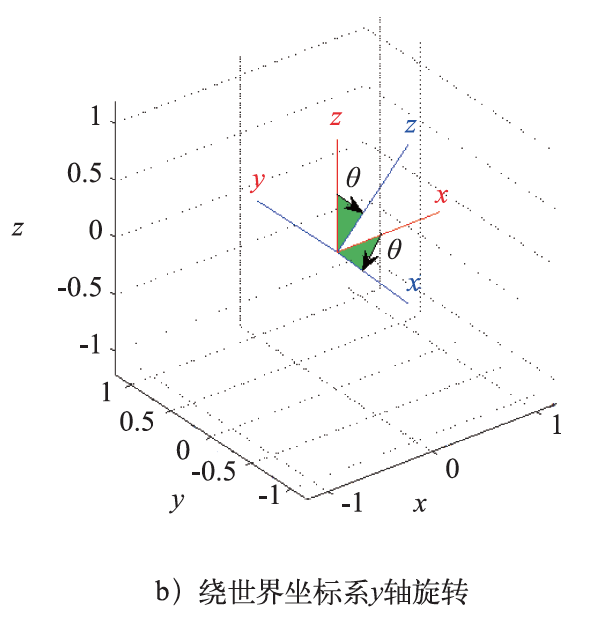
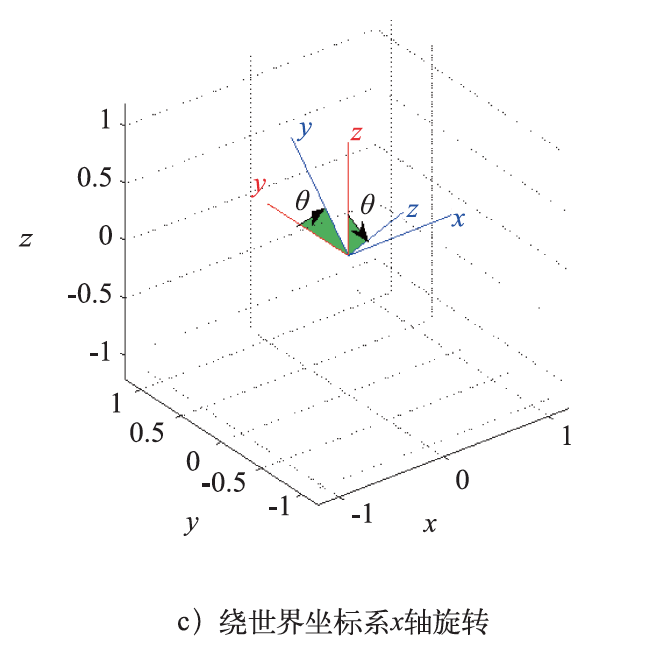
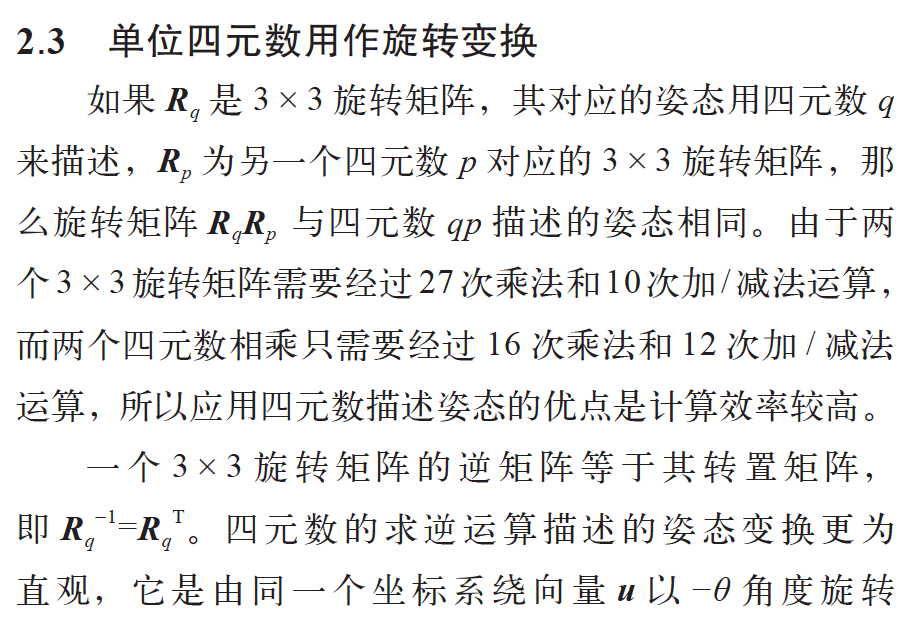
四元數(shù)用作姿態(tài)描述和旋轉(zhuǎn)變換




03
應(yīng)用四元數(shù)檢測(cè)工具的角位移
04
結(jié)束語
審核編輯:劉清
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
原文標(biāo)題:【主題策劃】四元數(shù)在工業(yè)機(jī)器人編程操作中的應(yīng)用
文章出處:【微信號(hào):CADCAM_beijing,微信公眾號(hào):智能制造IMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
相關(guān)推薦
的長(zhǎng)時(shí)間作業(yè),或是危險(xiǎn)、惡劣環(huán)境下的作業(yè),例如在沖壓、壓力鑄造、熱處理、焊接、涂裝、塑料制品成形、機(jī)械加工和簡(jiǎn)單裝配等工序上,以及在原子能工業(yè)等部門中,完成對(duì)人體有害物料的搬運(yùn)或工藝操作
發(fā)表于 05-18 22:03
自動(dòng)存入程序存儲(chǔ)器中在機(jī)器人自動(dòng)工作時(shí),控制系統(tǒng)從程序存儲(chǔ)器中檢出相應(yīng)信息,將指令信號(hào)傳給驅(qū)動(dòng)機(jī)構(gòu),使執(zhí)行機(jī)構(gòu)再現(xiàn)示教的各種動(dòng)作。示教輸入程序的工業(yè)
發(fā)表于 01-19 10:58
`工業(yè)機(jī)器人的核心部件包括機(jī)器人本體、減速器、伺服電機(jī)、控制系統(tǒng)等四大部分,這4部分分別占總成本的22%、24%、36%、12%。 筆者從中國國際
發(fā)表于 02-12 10:17
工作站調(diào)試維護(hù),操作編程等綜合素質(zhì)較強(qiáng)的技術(shù)人才。 三、就讀工業(yè)機(jī)器人技術(shù)專業(yè)的優(yōu)勢(shì)1、工業(yè)機(jī)器人
發(fā)表于 09-02 14:03
機(jī)器人中最核心的功能部件,在整個(gè)機(jī)器人制造成本中占到32%~37%左右。隨著工業(yè)機(jī)器人銷量增長(zhǎng),
發(fā)表于 09-18 10:03
介紹DELTA并聯(lián)機(jī)器人的基礎(chǔ)知識(shí)與系統(tǒng)設(shè)計(jì)原理,并結(jié)合ABB和FANUC機(jī)器人,介紹了工業(yè)生產(chǎn)中的常用并聯(lián)機(jī)器人機(jī)型與編程
發(fā)表于 10-29 17:03
的主要任務(wù)就是控制工業(yè)機(jī)器人在工作空間中的運(yùn)動(dòng)位置、姿態(tài)和軌跡、操作順序及動(dòng)作的時(shí)間等。具有編程簡(jiǎn)單、軟件菜單操作、友好的人機(jī)交互界面、在線
發(fā)表于 11-23 10:40
模式,逐漸向以工業(yè)機(jī)器人為主導(dǎo)的生產(chǎn)模式轉(zhuǎn)變。但是,隨著科技的發(fā)展和進(jìn)步,原有單純采用通過示教和預(yù)編程來實(shí)現(xiàn)自動(dòng)化工作的機(jī)器人產(chǎn)品在柔性生產(chǎn)
發(fā)表于 04-29 09:42
ZNH-IRW04型 工業(yè)機(jī)器人操作調(diào)整工技能鑒定平臺(tái)一、概述ZNH-IRW04型 工業(yè)機(jī)器人操作
發(fā)表于 07-01 13:00
ZNH-KH01工業(yè)機(jī)器人應(yīng)用編程考核設(shè)備一、概述工業(yè)機(jī)器人應(yīng)用編程考核設(shè)備能滿足
發(fā)表于 07-01 11:06
工具 當(dāng)IT 界在大談工業(yè)4.0 ,工業(yè)物聯(lián)網(wǎng)的時(shí)候,千萬不要以為傳統(tǒng)的自動(dòng)控制公司也跟著我們嗨,它們依然非常傳統(tǒng)。拿機(jī)器人領(lǐng)域來說,不同的廠家使用不同的
發(fā)表于 07-02 07:38
目錄概述行走軸模型拆分行走軸模型導(dǎo)入仿真軟件創(chuàng)建行走軸機(jī)械裝置外部軸配置向?qū)Р寮惭b虛擬機(jī)器人系統(tǒng)創(chuàng)建行走軸系統(tǒng)配置機(jī)器人安裝到行走軸行走軸運(yùn)動(dòng)控制文已經(jīng)首發(fā)在個(gè)人微信公眾號(hào):工業(yè)機(jī)器人
發(fā)表于 09-07 08:57
工業(yè)機(jī)器人的四大特征是哪些?工業(yè)機(jī)器人是由哪些部分組成的?工業(yè)
發(fā)表于 10-11 09:10
四元數(shù)法在4R機(jī)器人位置分析中的應(yīng)用_楊愛民
發(fā)表于 03-14 08:00
?1次下載
工業(yè)機(jī)器人的編程是確保機(jī)器人能夠執(zhí)行特定任務(wù)的關(guān)鍵步驟。編程方式多種多樣,每種方式都有其特定的應(yīng)用場(chǎng)景和優(yōu)勢(shì)。
![的頭像]() 發(fā)表于
發(fā)表于 09-04 09:26
?602次閱讀
") 四元數(shù)在工業(yè)機(jī)器人編程操作中的應(yīng)用
四元數(shù)在工業(yè)機(jī)器人編程操作中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論