") PID調(diào)試經(jīng)驗(yàn)分享
PID調(diào)試經(jīng)驗(yàn)分享
很多玩開源飛控的人,安裝驅(qū)動(dòng),端口,刷固件,校準(zhǔn)傳感器都不是啥問題,而且關(guān)于這些以及安裝,甚至遙控器設(shè)置,網(wǎng)上都有人教。唯獨(dú)一個(gè)PID調(diào)試基本是讓人最頭疼的地方。調(diào)法也眾說風(fēng)云說法不一,接下來把修改自MWC飛控國外社區(qū)網(wǎng)友的經(jīng)驗(yàn)分享出來。
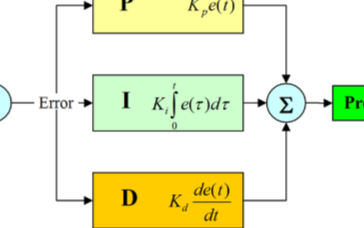
P-I-D:比例-積分-微分
當(dāng)多軸飛行器在PITCH/ROLL/YAW軸上有任意角度變化時(shí),陀螺儀會(huì)輸出相對(duì)于初始位置的偏差角度值。飛控根據(jù)記錄的原始位置,使用“PID”程序算法驅(qū)動(dòng)電機(jī),讓多軸飛行器回到初始位置。這是個(gè)基于測(cè)量角度偏差量,隨著時(shí)間推移的數(shù)據(jù)抽樣與預(yù)測(cè)未來位置的數(shù)據(jù)組合。它提供的信息足以使飛控驅(qū)動(dòng)電機(jī),讓多軸飛行器回到平衡狀態(tài)。
P值是PID中最重要的部分,它直接決定飛行器的飛行效果。
首次起飛前PID的基本調(diào)整
請(qǐng)先把PID設(shè)置成當(dāng)前程序版本的初始值。
用手小心抓著飛行器,增大油門直到接近懸停的位置,試著把它向前后左右傾斜,你會(huì)感覺到飛行器會(huì)產(chǎn)生一個(gè)反作用力,壓制人為造成的傾斜。
改變P值(ROLL/PITCH)的大小,直到飛行器變得難以隨意傾斜。如果沒有打開自穩(wěn)功能,飛控會(huì)允許你在一段時(shí)間內(nèi)傾斜飛行器,這是正常情況。
現(xiàn)在嘗試前后左右搖動(dòng)飛行器,增大P值(ROLL/PITCH)直到它自己開始出現(xiàn)抖動(dòng),再往回減小一點(diǎn)。
重復(fù)操作把YAW的P也調(diào)整好。
現(xiàn)在已經(jīng)適合在飛行中調(diào)整了。
高級(jí)調(diào)整,了解P、I和D的實(shí)際作用:
P – 糾正飛行器回到初始位置的力度大小。這個(gè)修正力度是一個(gè)比例值,反映初始位置偏差值減去飛控輸入控制方向變化的組合。較高的P值會(huì)產(chǎn)生較強(qiáng)的修正力去抵抗飛行器位置的偏移。如果P值太高,在飛行器返回初始位置的過程中會(huì)過沖然后再次往反方向修正,接著再次進(jìn)行回到初始位置的補(bǔ)償。這會(huì)導(dǎo)致飛行器出現(xiàn)持續(xù)振蕩,嚴(yán)重的話會(huì)完全破壞平衡。增大P值:飛行器會(huì)逐漸變得穩(wěn)定,但P值太高會(huì)造成振蕩和失控。需要注意的是,提高P值會(huì)產(chǎn)生一個(gè)更強(qiáng)的修正力度,阻止飛行器的偏移。減小P值:飛行器會(huì)逐漸開始偏移,但P值太低會(huì)讓飛行器變得非常不穩(wěn)定。它會(huì)讓阻止飛行器偏移的修正力度變?nèi)酢L丶硷w行:需要的P值稍高。普通飛行:需要的P值稍低。
I – 對(duì)角度變化進(jìn)行采樣與取平均值計(jì)算的時(shí)間周期存在偏差時(shí),返回到初始位置有個(gè)修正的過程,在修正過程中力度會(huì)越來越大,直到達(dá)到最大值。較高的I值會(huì)增強(qiáng)穩(wěn)定的效果。增大I值:減小漂移和提升穩(wěn)定效果,但過大的I值會(huì)延長(zhǎng)穩(wěn)定過程的周期,同時(shí)也會(huì)降低P的效果。減小I值:增強(qiáng)反應(yīng)速度,但會(huì)增加漂移和降低穩(wěn)定效果,同時(shí)會(huì)提升P的效果。特技飛行:需要的I值稍低。普通飛行:需要的I值稍高。
D – 飛行器回到初始位置的速度較高的D值(數(shù)值與效果相反,較高的D值參數(shù)上會(huì)更接近0)意味著飛行器會(huì)快速返到回初始位置。增大D值:(請(qǐng)記住,增大效果等于減小設(shè)定的參數(shù)值)提升修正的速度,也會(huì)提升產(chǎn)生修正過量與振蕩的幾率,同時(shí)也會(huì)提升P的效果。減小D值:(請(qǐng)記住,減小效果等于增大設(shè)定的參數(shù)值)降低由偏差狀態(tài)返回初始位置的振蕩,恢復(fù)到穩(wěn)定效果的時(shí)間變長(zhǎng),同時(shí)也會(huì)降低P的效果。特技飛行:增大D值(請(qǐng)注意是減小參數(shù)值)。普通飛行:減小的D值(請(qǐng)注意是增大參數(shù)值)。
一些建議
特技飛行:增大P值直到出現(xiàn)振蕩,然后稍微減小一點(diǎn)。改變I值直到懸停漂移達(dá)到無法接受的程度,然后稍微增大一點(diǎn)。增大D值(請(qǐng)注意是減小參數(shù)值)直到出現(xiàn)大動(dòng)作控制時(shí)無法接受的振蕩。P值現(xiàn)在可以稍微減小一點(diǎn)。
穩(wěn)定飛行(常規(guī)/FPV): 增大P值直到出現(xiàn)振蕩,然后稍微減小一點(diǎn)。改變I值直到偏差程度達(dá)到無法接受的程度,然后稍微增大一點(diǎn)。減小D值(請(qǐng)注意是增大參數(shù)值)直到出現(xiàn)大動(dòng)作控制時(shí)回中速度變慢,然后稍微增大一點(diǎn)D值(請(qǐng)注意是減小參數(shù)值)。
P值現(xiàn)在可以稍微減小一點(diǎn)。在一般的飛行中,你會(huì)找到一組折中的PID值,這是最優(yōu)化的效果。
P(比例):這是一個(gè)增益因子,當(dāng)多軸飛行器受風(fēng)等的影響發(fā)生向一邊傾斜時(shí),P值直接決定多軸飛行器的抵抗這種傾斜的力的大小。P越大,多軸飛行器抵抗意外傾斜的能力越強(qiáng),但P過于大時(shí)會(huì)引起多軸飛行器抖動(dòng)甚至猛烈側(cè)翻。P越小,多軸飛行器抵抗意外傾斜的能力越弱,但P過小時(shí)會(huì)引起多軸飛行器自平衡能力不足甚至朝一邊側(cè)翻(如順著風(fēng)的方向)。
I(積分):這個(gè)參數(shù)決定了飛行控制器對(duì)過往飛行狀態(tài)的依賴程度。如果I值太小,會(huì)使飛行器過度依賴當(dāng)前的誤差,不能抑制“過敏”現(xiàn)象,從而造成飛行顛簸;如果I值太大,則會(huì)過度削弱系統(tǒng)對(duì)誤差的反應(yīng)能力,造成反應(yīng)遲緩。
D(微分):一旦多軸飛行器發(fā)生傾斜,則認(rèn)為多軸飛行器會(huì)繼續(xù)向同一方向傾斜,合適的D參數(shù)的能有效抑制未來可能發(fā)生的傾斜。如果D值太小,您會(huì)覺得多軸飛行器反應(yīng)不夠靈敏;如果D值太大,也會(huì)引起“過敏”。相較于P而言,D反映得更多的是靈敏度,而P反映的是糾正誤差的力度。
在此鄭重聲明一下:大部分的飛機(jī)因?yàn)椴豢赡艽嬖跅l件完全一樣的情況,所以很多時(shí)候PID直接搬運(yùn)的效果和別人花時(shí)間調(diào)好的往往效果是不太一樣的,在用的設(shè)備完全一樣,重心點(diǎn)也一樣,重量一樣等大多數(shù)變量都符合的情況下使用同組PID才較有可能直接能穩(wěn)。所以,僅供參考,還是建議大家花點(diǎn)時(shí)間學(xué)習(xí)調(diào)參。
審核編輯:湯梓紅
-
PID
+關(guān)注
關(guān)注
35文章
1471瀏覽量
85287 -
開源
+關(guān)注
關(guān)注
3文章
3247瀏覽量
42402 -
飛行器
+關(guān)注
關(guān)注
13文章
716瀏覽量
45469
原文標(biāo)題:PID調(diào)參,幾乎是開源飛控玩家最頭疼的問題
文章出處:【微信號(hào):雨飛工作室,微信公眾號(hào):雨飛工作室】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
多年PID算法調(diào)節(jié)經(jīng)驗(yàn)
如何對(duì)電機(jī)進(jìn)行PID調(diào)試
介紹一下PID參數(shù)的基本調(diào)試方法
PID調(diào)節(jié)的經(jīng)驗(yàn)分享
PID算法原理、調(diào)試經(jīng)驗(yàn)以及代碼
Arduino的PID自動(dòng)調(diào)試庫免費(fèi)下載
KEIL調(diào)試經(jīng)驗(yàn)與技巧分享
PID算法原理_調(diào)試經(jīng)驗(yàn)以及代碼總結(jié)

KEIL調(diào)試經(jīng)驗(yàn)總結(jié)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論