 凌華科技SuperCAT運動控制器在異型插件機上的應用
凌華科技SuperCAT運動控制器在異型插件機上的應用
應用背景:
插件機的作用是把編帶上的電子元器件按照程序自動安裝在印刷電路板上的設備,市面上常見的插件機有標準插件機和異型插件機等,其中異型插件機與標準插件機的區別是:異型插件機除了可以插裝標準化包裝(連續式包裝,元器件間距固定不變)的元器件以外,還能夠插裝非標準包裝或者盤料等多種類元器件。
目前異型插件機的產能相比標準插件機低,但是精度會更高,可插接的元器件類型也更豐富,包含DIP、射頻連接器、電容器、電阻器、接線端子、電磁線圈、變電器等基本上全部的元器件。為了不斷提升設備的產能并保證運行的精度,越來越多的廠商對運動控制和視覺飛拍提出了更高的要求。
SuperCAT產品概述
SuperCAT是凌華科技打造的基于軟件控制的EtherCAT運動控制器,其核心的控制軟件來自于凌華二十多年運動控制經驗的積累,整合了凌華脈沖卡和EtherCAT總線卡的所有功能,系統通訊周期相比硬件的EtherCAT總線卡得到了大幅提升,同時可以滿足更多軸數的應用需求。
SuperCAT產品特性
? 具備EtherCAT主站功能
? 運動控制周期高達125us
? 最多支持128軸運動控制
? 最低 API 延遲<10us
? APS SDK 支援
? 支持開發語法 C#, .NET, C/C++, Python, Java…etc
? 支援多任務與實時程序運行
插件機的需求:
1) 兩軸或多軸插補功能。
2) 2D觸發功能。
SuperCAT解決方案:
該設備的核心運動控制單元采用SuperCAT主控軟件,搭配凌華工業電腦,將原有的脈沖卡或EtherCAT總線卡進行取代,除了可以降低了設備的購置成本以及后期維護的費用外,還可以極大提升總線通訊的速率,從而幫助設備在運動控制中實現更好的速度規劃。
1) 兩軸插補功能,用到的函數和語法如下,
APS_pt_motion_add_point
Syntax:
C/C++:
I32 APS_pt_motion_add_point ( I32 Axis_ID, I32 ArraySize, F64 *PositionArray, F64 *TimeArray );
Visual Basic:
APS_pt_motion_add_point(ByVal Axis_ID As Long, ByVal ArraySizeAs Long, PositionArrayAs Double, TimeArrayAs Double) As Long
APS_pt_motion_get_status
Syntax:
C/C++:
I32 APS_pt_motion_get_status( I32 Axis_ID, I32 *FreeSize, I32 *PointCount, I32 *State );
Visual Basic: APS_pt_motion_get_status (ByVal Axis_ID As Long, FreeSize As Long, PointCountAs Long, StateAs Long) As Long
APS_pt_motion_start
Syntax:
C/C++:
I32 APS_pt_motion_start (I32 Dimension, I32 *Axis_ID_Array, I32 Enable );
Visual Basic:
APS_pt_motion_start(ByVal Dimension As Long, Axis_ID_Array As Long, ByVal Enable As Long) As Long
APS_pt_motion_reset
Syntax:
C/C++:
I32 APS_pt_motion_reset (I32 Axis_ID);
Visual Basic:
APS_pt_motion_reset (ByVal Axis_ID As Long) As Long
2) 多軸插補功能,用到的函數和語法如下,
APS_line
Syntax:
C/C++:
I32 APS_line( I32 Dimension, I32 *Axis_ID_Array, I32 Option, F64 *PositionArray, F64 *TransPara, ASYNCALL *Wait);
Visual Basic:
APS_line (ByVal Dimension As Long, Axis_ID_Array As Long, ByVal Option As Long, PositionArray As Double, TransPara As Double, Wait As ASYNCALL) As Long
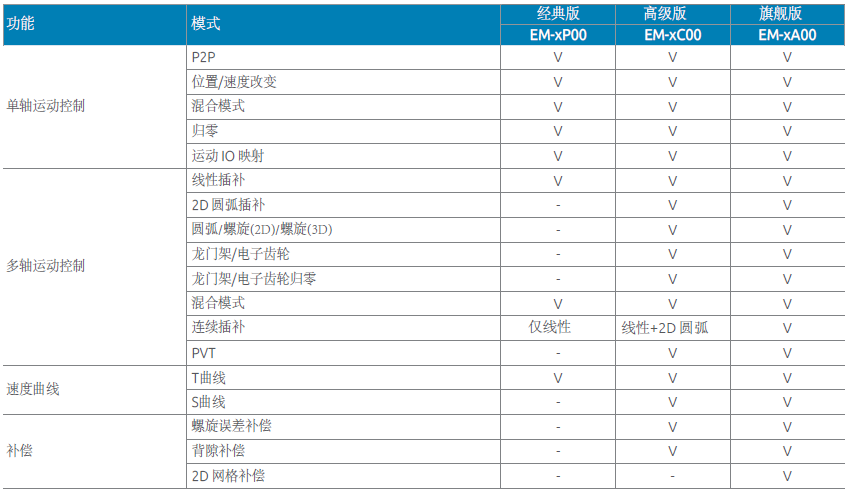
3)凌華科技SuperCAT運動控制器可以提供的功能如下,
4)2D觸發功能
2D觸發功能通過外接ECAT-TRG4 4通道高速位置比較和觸發模塊實現,ECAT-TRG4 是 EtherCAT從端模塊,具有高速位置比較觸發和編碼器單個信號中繼功能,該模塊的規格如下,
? 4 通道點表觸發 - 最大10 MHz帶FIFO 255 點
? 4 通道線性觸發 - 最大10MHz
? 4 通道位置鎖存 - 最大3 MHz帶 255 點
? 通過主站最多支持 32 組龍門功能
? 軸參數的斷電記憶
? 支持編碼器信號中繼功能
? 支持高級點表
需要用到的函數和語法如下,
APS_set_field_bus_multi_trigger_table
Syntax:
C/C++:
I32 APS_set_field_bus_multi_trigger_table( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 MTCmpCh, I32 Dimension, MCMP_POINT *DataArray, I32 ArraySize , I32 Window );
APS_get_field_bus_multi_trigger_table_cmp
Syntax:
C/C++:
I32 APS_get_field_bus_multi_trigger_table_cmp( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 MTCmpCh, I32 Dimension, MCMP_POINT *CmpVal );
APS_get_field_bus_multi_table_cmp_remain_count
Syntax:
C/C++:
I32 APS_get_field_bus_multi_table_cmp_remain_count( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 MTCmpCh, I32 *Cnt );
凌華科技EtherCAT一站式解決方案:
凌華科技為智能制造用戶提供一站式解決方案,實現生產設備之間的互聯互通,全面共享和交互內部數據,從而優化生產流程,更好地應對市場需求的變化。
用戶可通過PC端的編程環境,在單個硬件平臺上實現應用程序的集中控制,從而降低成本,提高系統可靠性和安全性。
審核編輯:劉清
-
運動控制器
+關注
關注
2文章
393瀏覽量
24653 -
凌華科技
+關注
關注
0文章
152瀏覽量
29794
原文標題:凌華科技SuperCAT運動控制器在異型插件機上的應用
文章出處:【微信號:凌華科技,微信公眾號:凌華科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





EtherCAT運動控制器在ROS上的應用(上)

凌華科技SuperCAT運動控制器在LED芯片分選機上的應用








 工商網監
工商網監
評論